目录
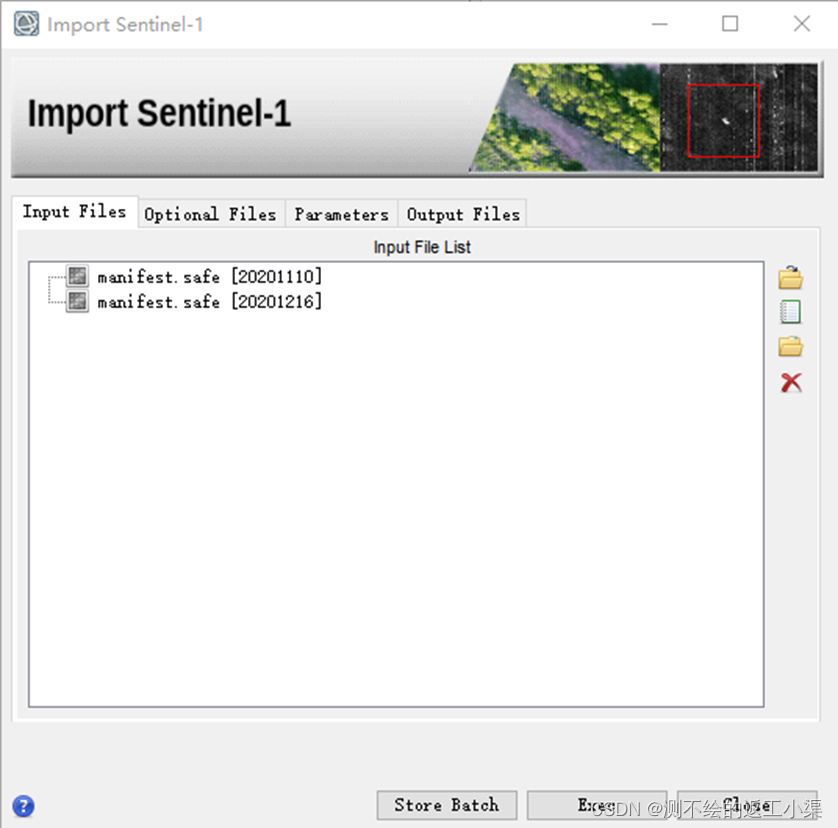
1.数据导入
选用时间间隔大致为1个月的SLC数据
2.基线估算
InSAR技术基础应用 - 反演DEM - 知乎这部分有一些介绍
| 结果 |
说明 |
| Normal Baseline(m) = 15.132 |
空间基线,在拍摄时两个传感器间隔的距离15.132米 |
| Critical Baseline min-max(m) = [-4401.719] - [4401.719] |
临界基线,即若空间基线大于4401.719表示两个数据失相干了。一般在应用中需要小于临界基线的十分之一 |
| Absolute Time Baseline (Days)=36 |
时间基线36天 |
| Range Shift (pixels) = 0.607 Azimuth Shift (pixels)=0.572 |
数据在方面向、距离向的偏移量,之后可以通过配准来校正 |
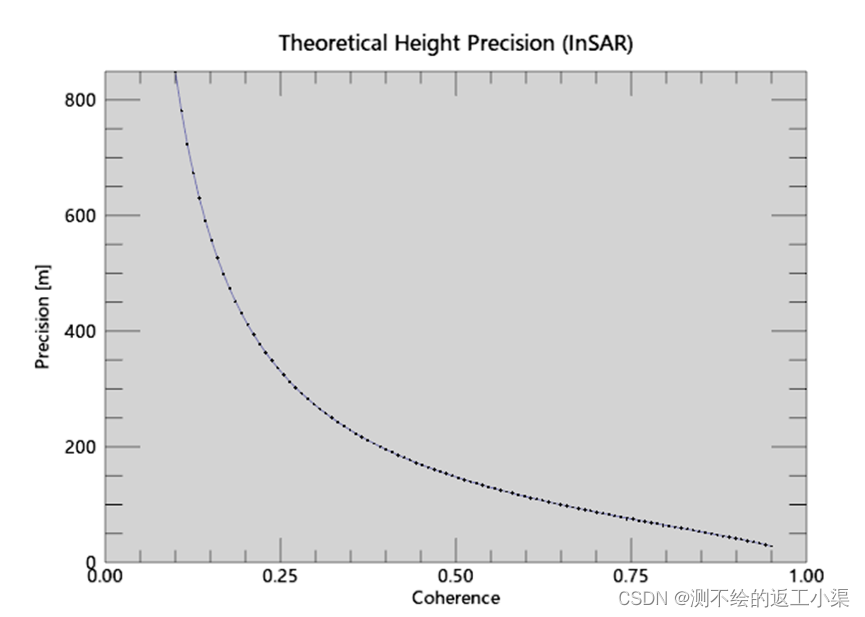
| 2 PI Ambiguity height (InSAR) (m) = 758.194 |
2PI模糊高程(即一周期的相位变化对应的高程变化)。相位变化是周期性的,相位变化2PI对应的高程变化量是758.194。此参数越小,高程测量的精度越高。此参数与空间基线是反比关系。 |
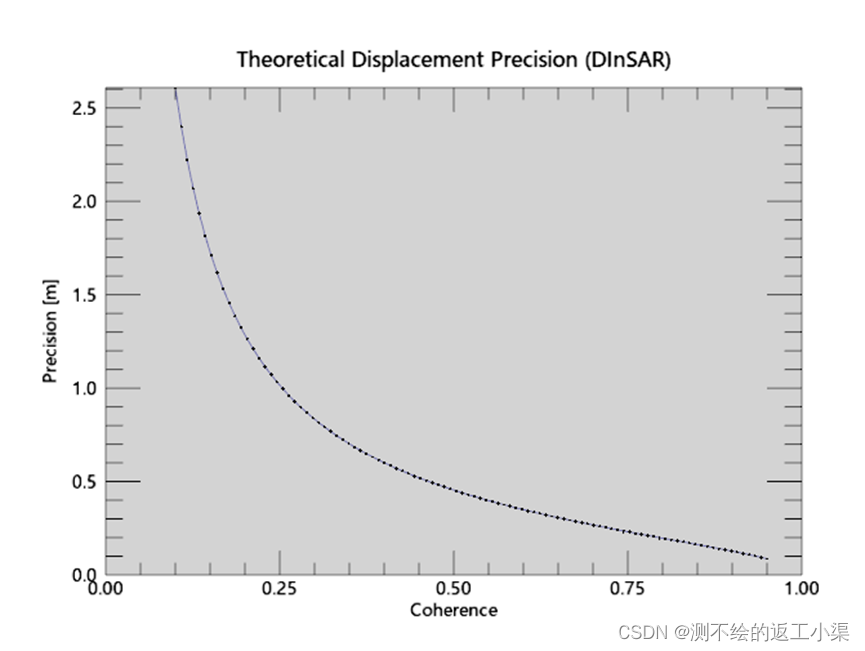
| 2 PI Ambiguity displacement (DInSAR) (m) = 0.028 |
DInSAR精度为0.028 |
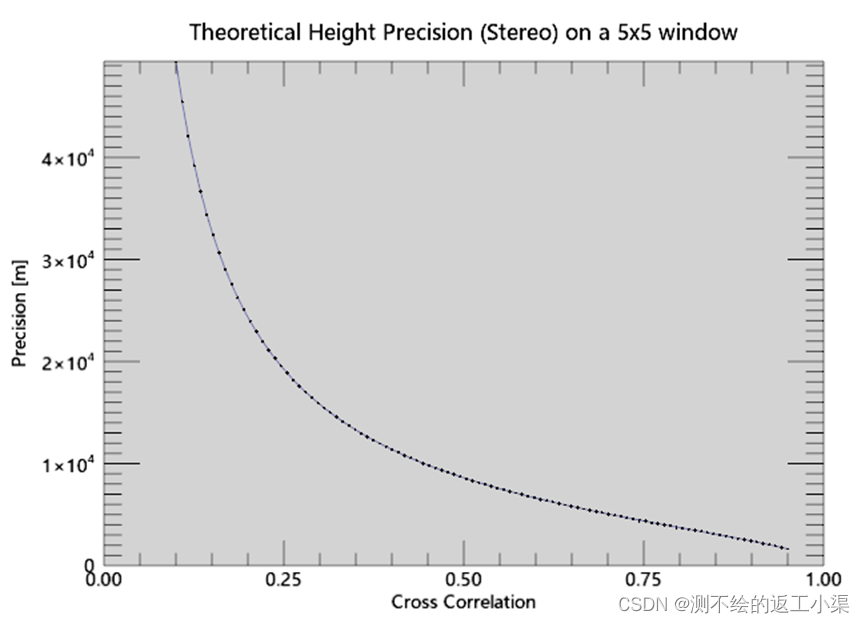
| 1 Pixel Shift Ambiguity height(Stereo Radargrammetry) (m) = 63688.308 |
立体量测的精度63688.308m(哨兵数据适合做InSAR、不适合应用于立体量测) |
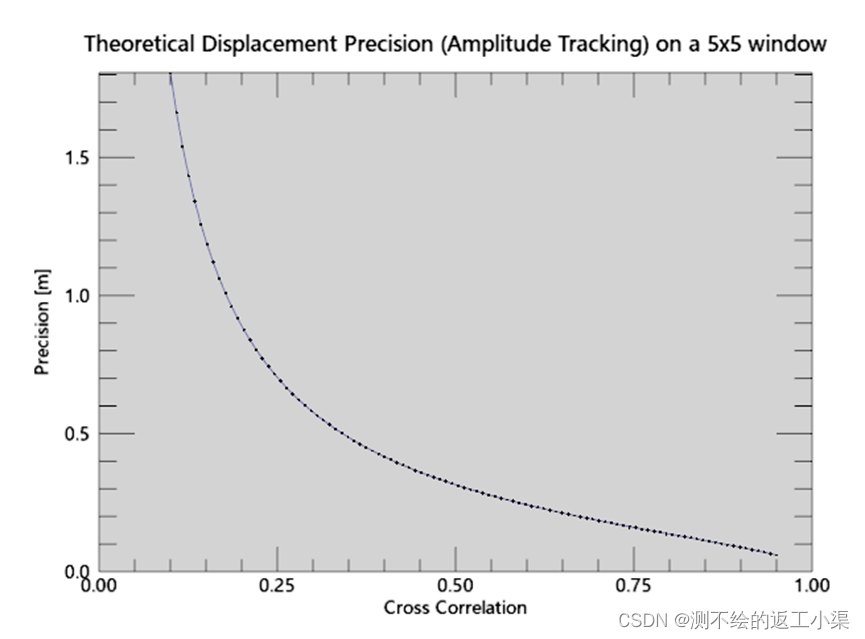
| 1 Pixel Shift Ambiguity displacement (Amplitude Tracking (m) = 2.330 |
振幅偏移量测,做大的形变(完全失相干的形变,如滑坡、冰川移动等)的精度是2.330米 |
| Master Incidence Angle = 31.059 Absolute Incidence Angle difference = 0.001 |
主影像入射角31.059,主从影像相差0.001 |
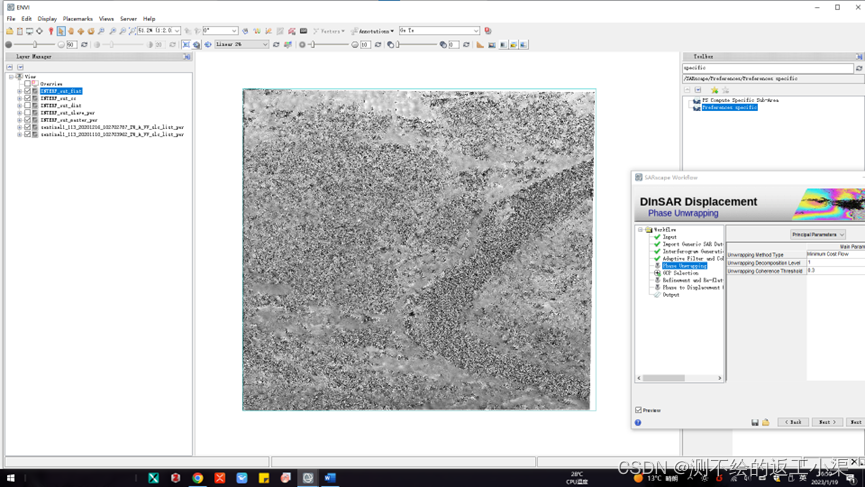
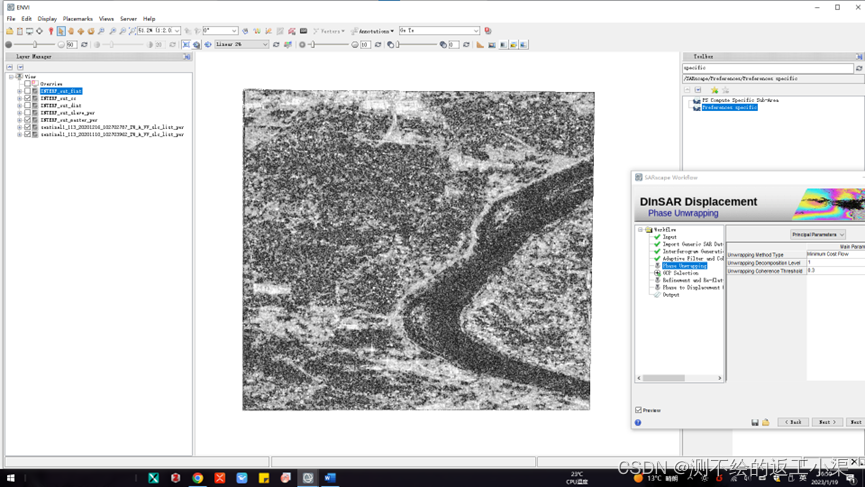
3 DInSAR工作流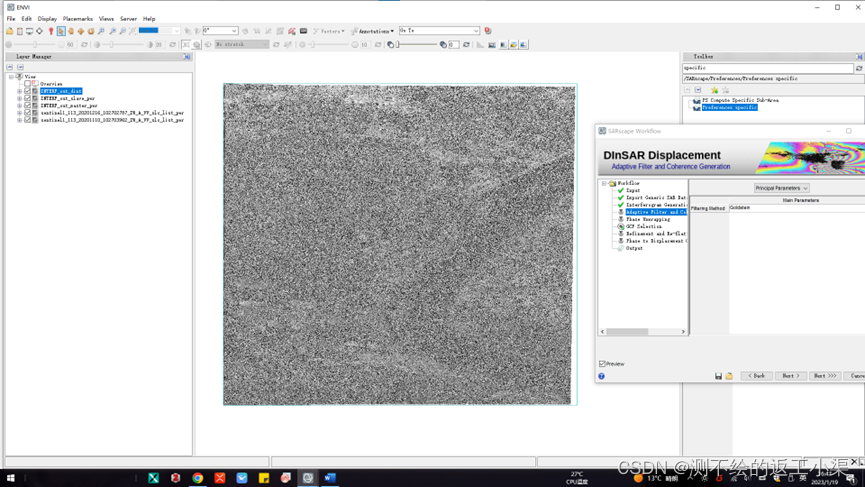
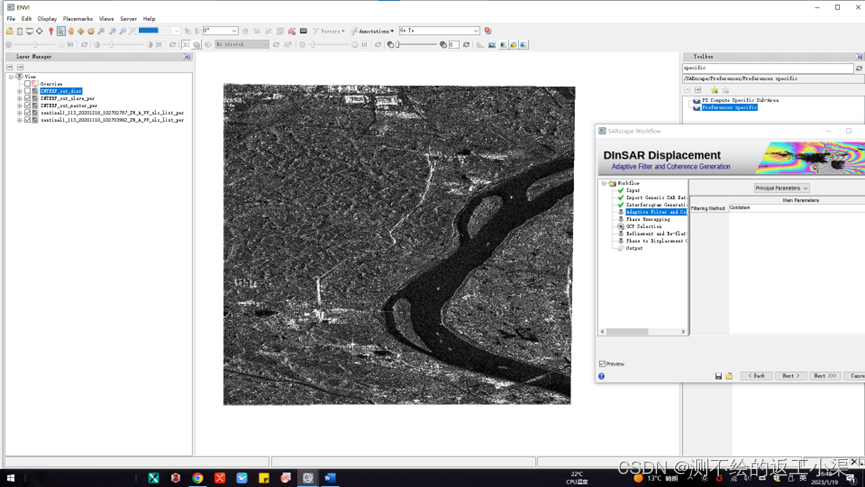
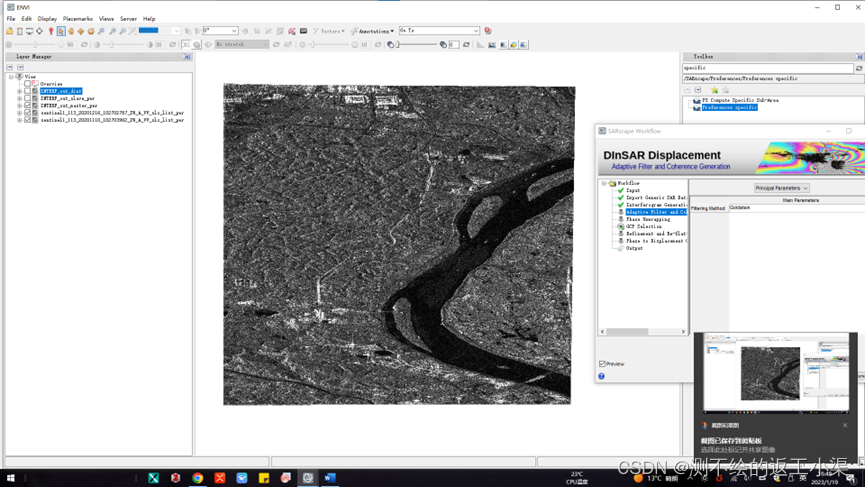
滤波后
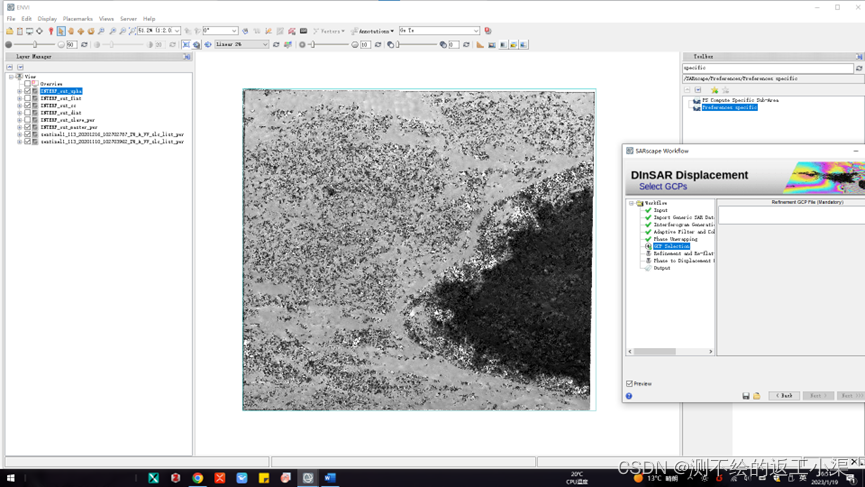
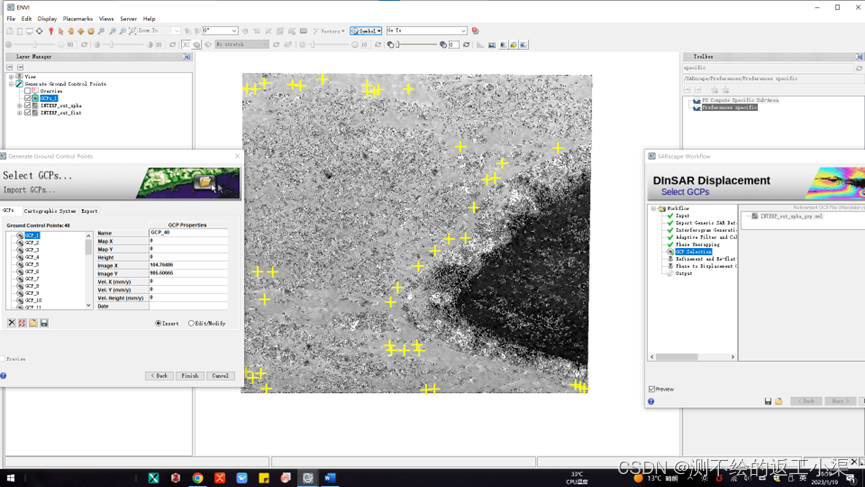
选择GCP
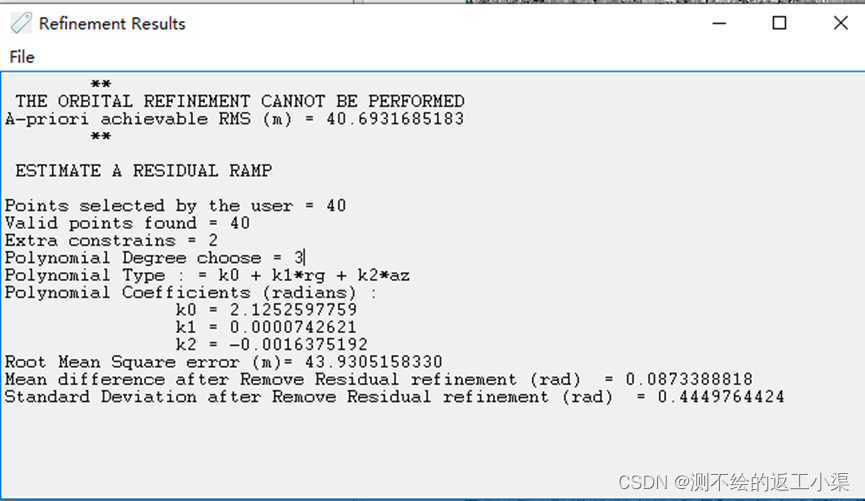
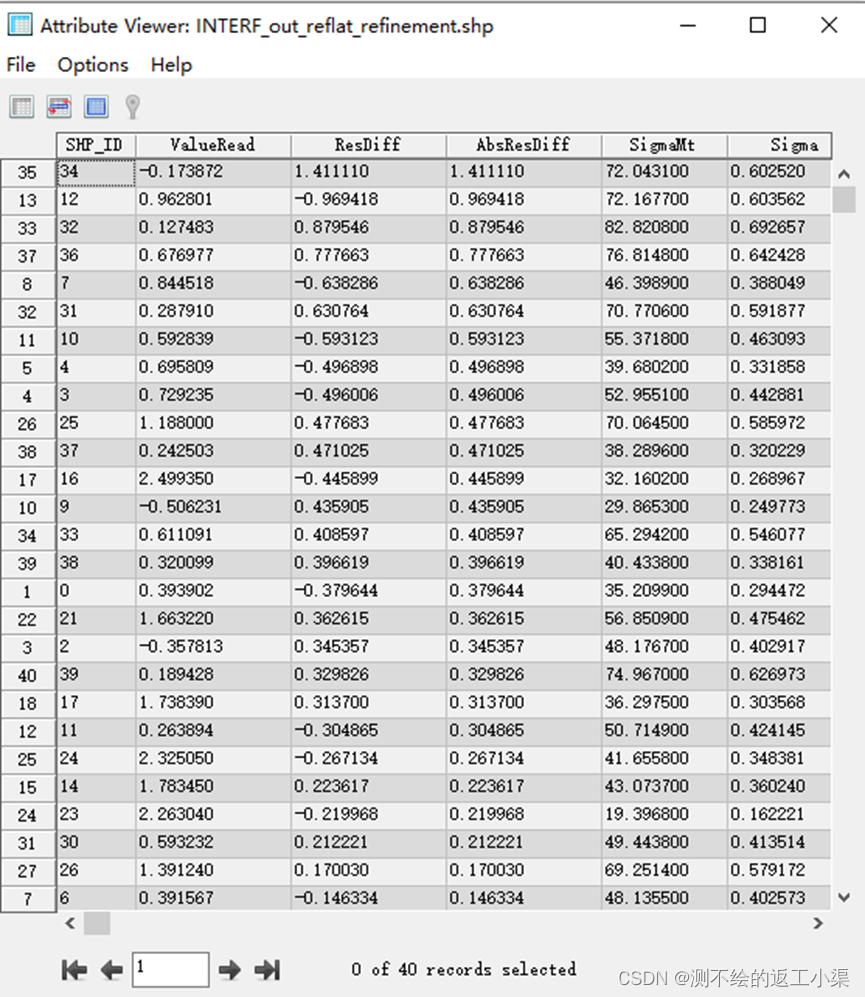
轨道精炼和重去平后
地理编码后