一、向量
1、向量的表示方式
一般表示形式为

向量的模长
单位向量(一般用于求向量的方向)
2、向量的计算
相加、相减,都是对应坐标进行相加减
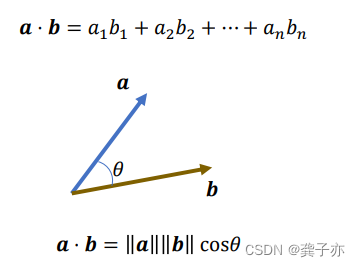
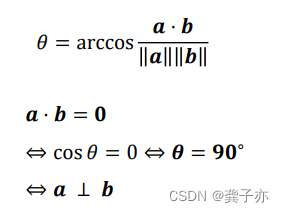
点乘,结果为一个数,可以通过点乘公式进行逆推,求出两个向量之间的夹角。
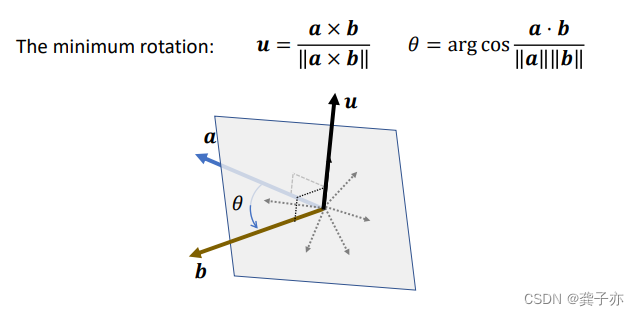
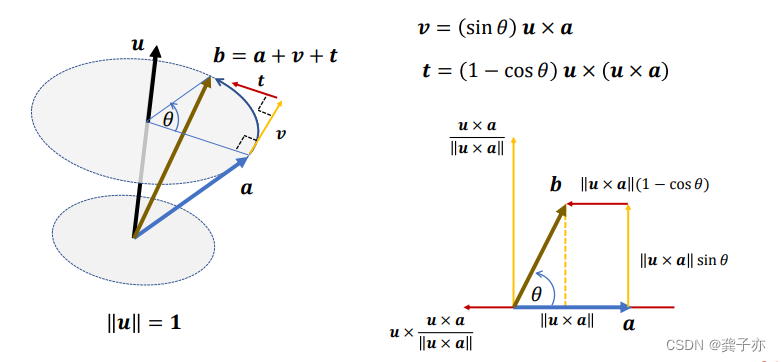
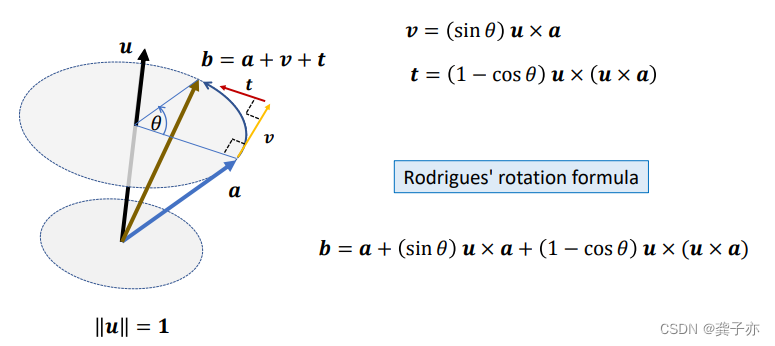
叉乘,结果为一个垂直于由原来两个向量构成的平面的向量,可以通过叉乘去计算出旋转轴的方向

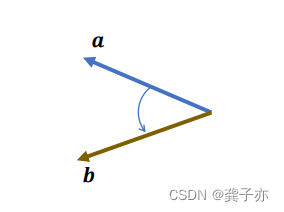
一个小例子,如何将下图中的a向量旋转到b向量呢?
(1)、对a、b两个向量进行叉乘,得到一个新的向量c,向量c的方向为旋转轴的方向
(2)、对a、b两个向量进行点乘逆运算,求出两个向量之间的夹角
(3)、得到上述数据后,在根据几何关系,就可以算出b向量的结果
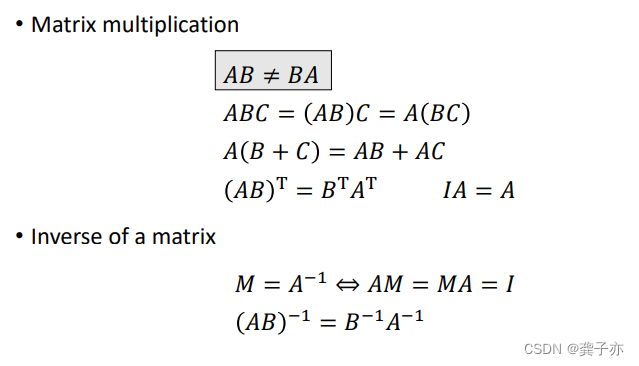
二、矩阵
1、矩阵操作
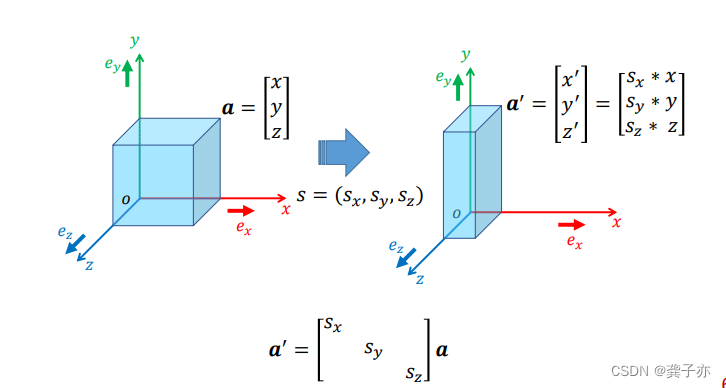
2、一些特殊矩阵
缩放矩阵
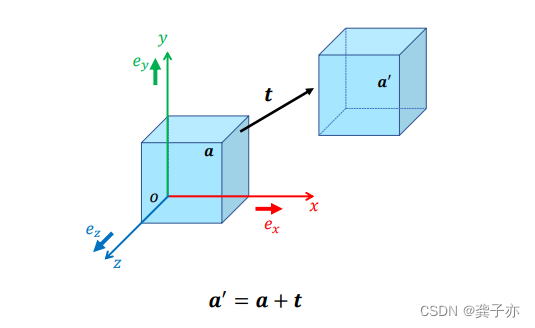
位移矩阵
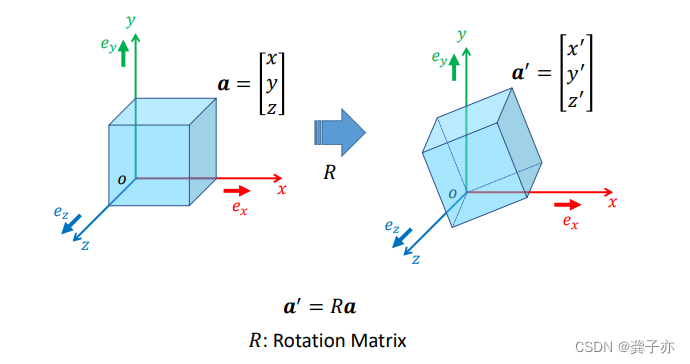
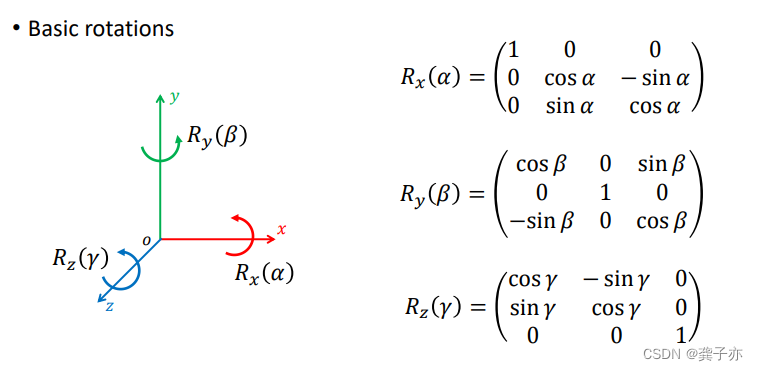
旋转矩阵,一般会分为绕x、y、z三个轴的旋转矩阵,
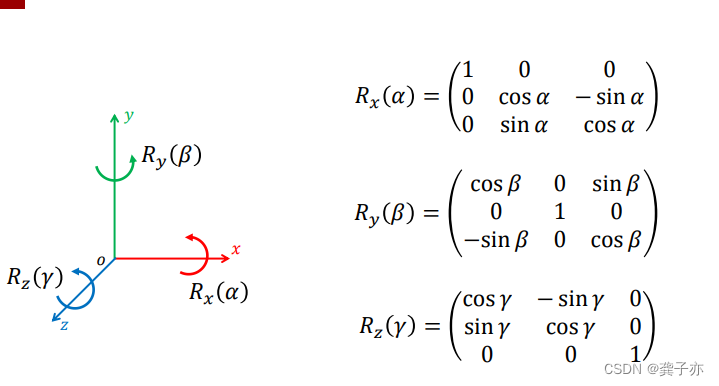

可以将矩阵旋转转换成轴旋转,具体方法就不在这里写了。
三、三维旋转的一些方法
1、旋转矩阵(Rotation Matrix)
前面说过,就不再重复了
2、欧拉角(Euler angles)
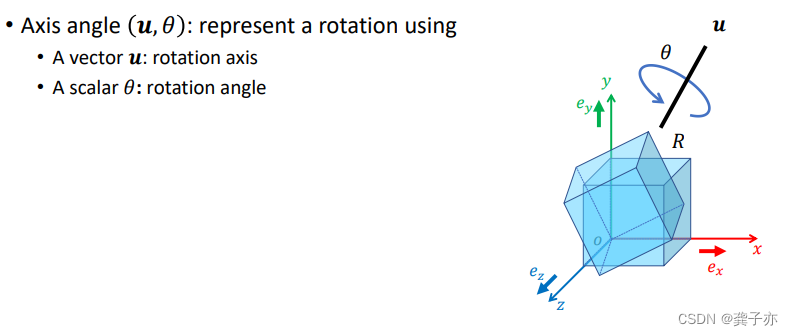
3、轴角/旋转向量(Axis Angles/Rotation Vectors)
轴角表示为(x,y,z,theta),前三个表示旋转轴,最后一个表示旋转角度
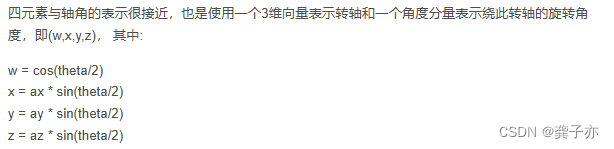
4、四元数(Quaternions)
四元数的表示方法为(w,x,y,z)或者(w,v)
5、不同旋转方法的优缺点
