路径规划
路径规划是导航的最终目标。这允许用户向机器人给出目标姿势,并让它在给定的环境中自主地从当前位置导航到目标位置。这是我们迄今为止所做的一切(地图绘制和本地化)的汇集点。ROS 导航堆栈已经为我们完成了繁重的工作,就像我们在地图绘制和本地化中看到的那样。导航的路径规划部分是在名为 move_base 的包中实现的。在我们开始使用这个包之前,了解全局并了解关键细节非常重要。
使用的 ROS 节点:move_base
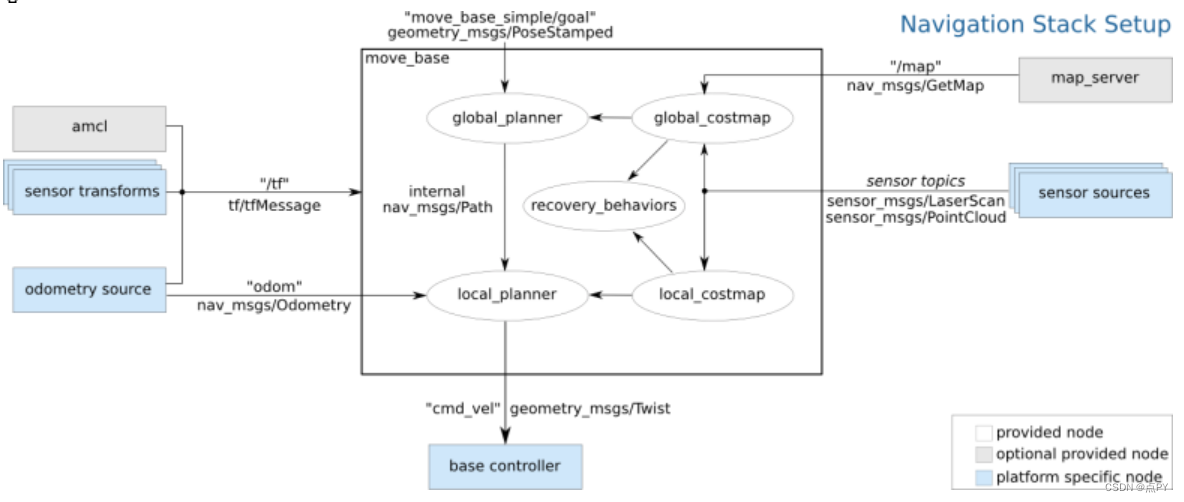
中间的大方框代表move_base节点,它是ROS导航堆栈的核心。它订阅了多个主题,包括映射部分中介绍的map_server 节点和本地化部分中介绍的amcl 节点。在 move_base 节点中,有很多事情需要在继续之前理解。
在 move_base 节点中,该图显示了四个主要项目。让我们一一了解它们。
- global_planner
- local_planner
- global_costmap
- local_costmap
Planner是一种算法,用于计算机器人从当前位置到用户提供的目标位置的路径。在 ROS 中,规划器依靠称为成本图的地图 来生成计划。稍后将解释成本图。让我们花一些时间来了解 move_base 节点中发挥作用的各种规划器。
mov