文章目录
前言
BlueRobotics 水下声纳(BlueRobotics Underwater Sonar)是一种单波束编码器,最大探测距离 30m,波束宽度 30 度,最大探测深度 300m。更多详情,请参阅 BlueRobotics 产品页面的"技术细节"部分(Technical Details section of the product page on BlueRobotics)。
!Note
Rover-4.1.0 (及更高版本)要求 Ping 传感器运行 3.28 版(或更高版本)固件。请参阅下文了解如何升级 Ping 固件。
1 在哪里购买
- 该传感器可直接从 BlueRobotics 购买;
- 可选配 BLUART USB 至串行 RS485 适配器(BLUART USB to Serial RS485 adapter),将传感器连接至电脑进行测试。
2 连接到自动驾驶仪
串行连接可以使用任何空闲的串行/UART 端口。下图显示了如何连接 SERIAL2。
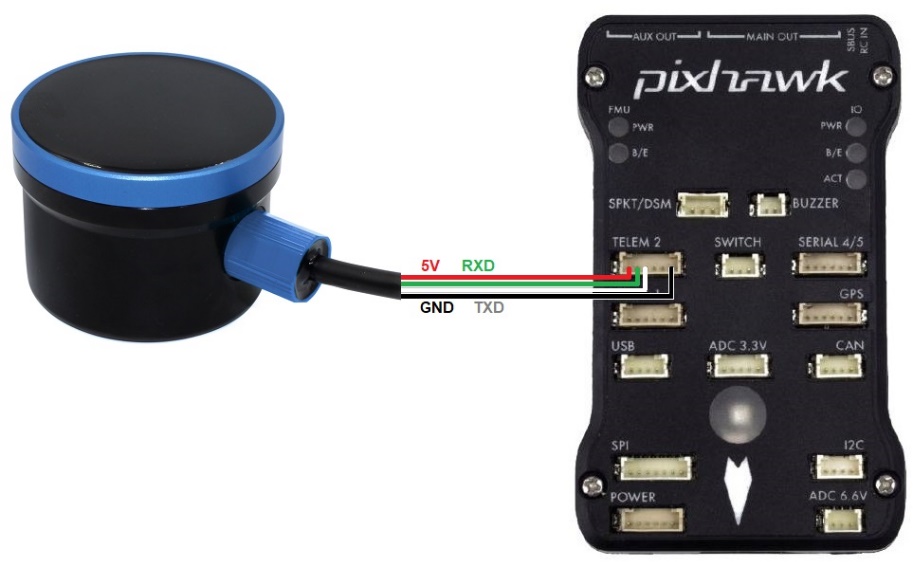
如果使用自动驾驶仪上的 SERIAL2 端口,则应设置以下参数:
- SERIAL2_PROTOCOL = 9 (Lidar);
- SERIAL2_BAUD = 115 (115200 baud);
- RNGFND1_TYPE = 23 (BlueRoboticsPing);
- RNGFND1_MIN_CM = 30;
- RNGFND1_MAX_CM = 2600。这是测距仪能够可靠读取的距离(厘米);
- RNGFND1_ORIENT = 25(向下),如果安装在船上。
3 PingViewer 用于测试和升级传感器
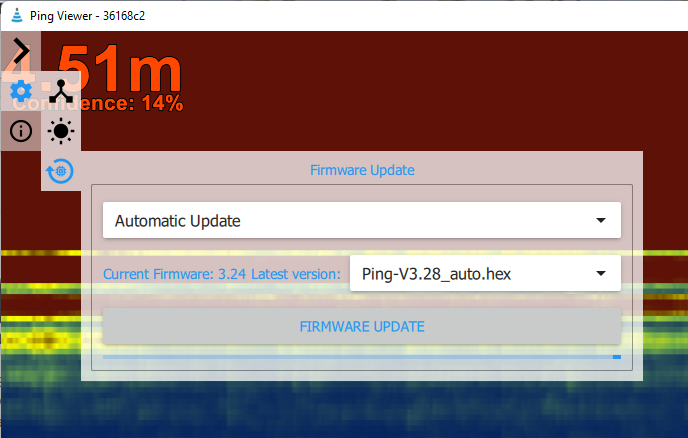
BlueRobotic 的 PingViewer(BlueRobotic’s PingViewer)可用于测试传感器和升级固件(upgrade the firmware)。
- 使用 USB 调试线和 BLUART USB 转 RS485 串行适配器(BLUART USB to Serial RS485 adapter)将 Ping 连接到电脑;
- 下载、安装并运行 PingViewer;
- 在 PingViewer 应用程序中连接传感器;
- 从左上角菜单中选择齿轮图标"固件升级"(Firmware Upgrade),必要时将固件升级到"Ping_V3.28_auto"(或更高版本)。
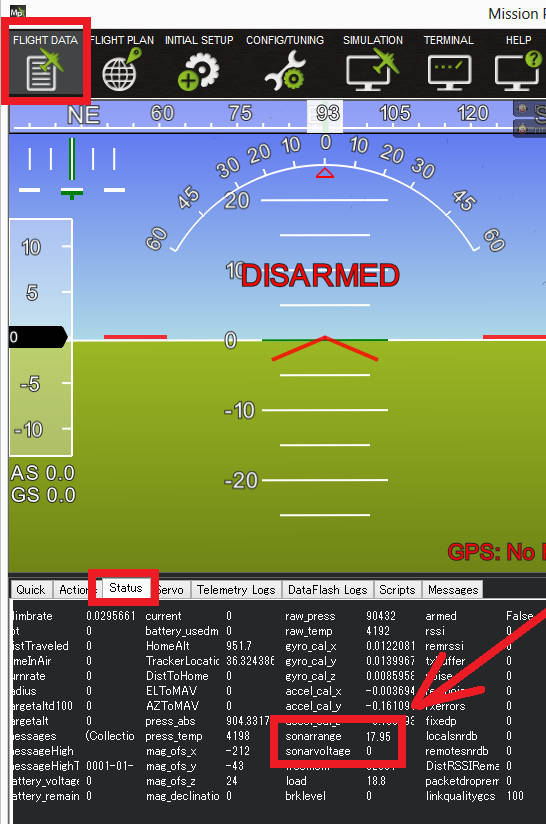
测试传感器
传感器读取的距离可在Mission Planner飞行数据屏幕的状态选项卡中查看。仔细查看"sonarrange"(声纳范围)。
4 参数说明
1、SERIAL2_PROTOCOL:串行2协议选择
注意:更改后需要重新启动。
控制 Serial2 端口应使用何种协议。请注意,Frsky 选项需要外部转换器硬件。详情请查看维基百科。
| Values |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
2、RNGFND1_TYPE:测距仪类型
连接测距仪的类型。
| Values |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|