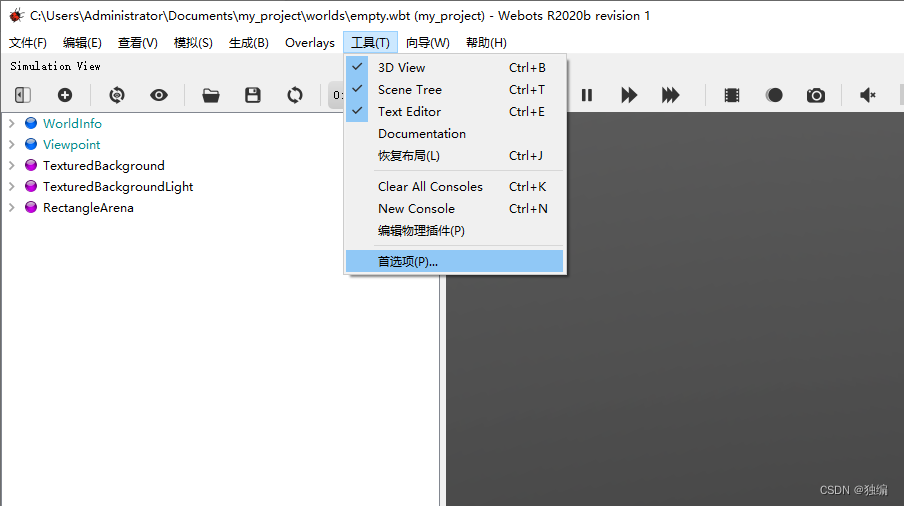
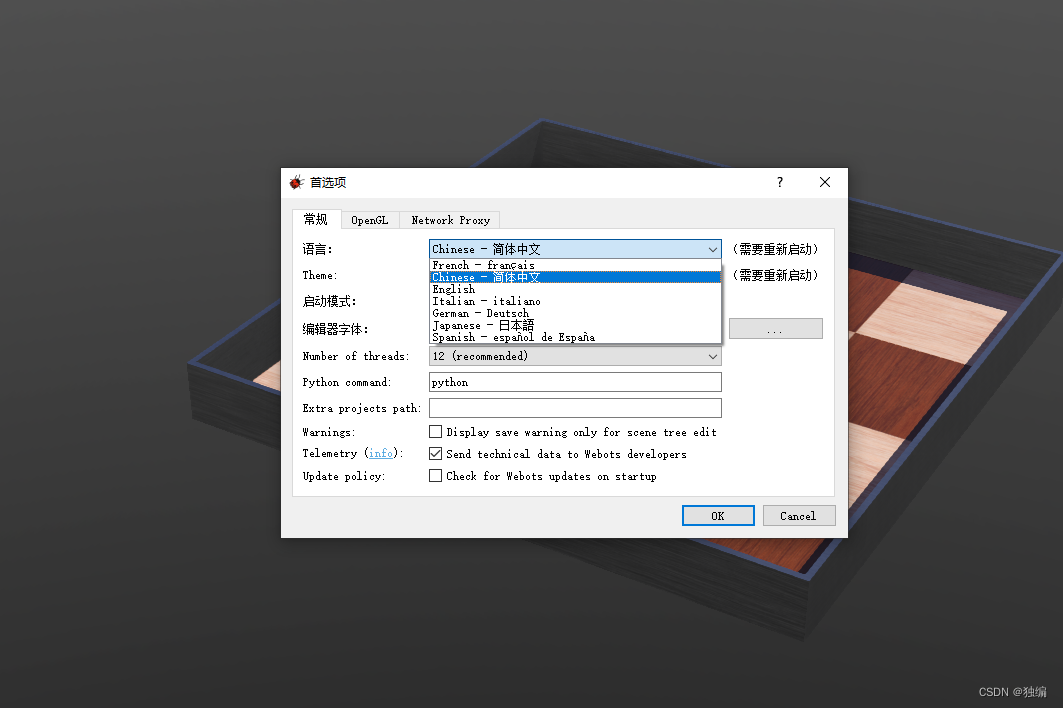
1、将webots语言改为中文
2、建立一个新世界
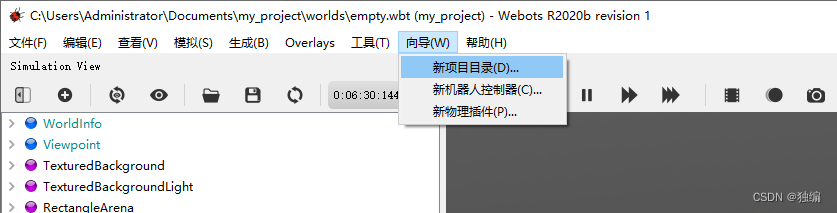
然后根据提示下一步→选择文件存储的路径→勾选Add a rectangle arena→完成创建
3、建立一个物体(圆柱、立方体等)
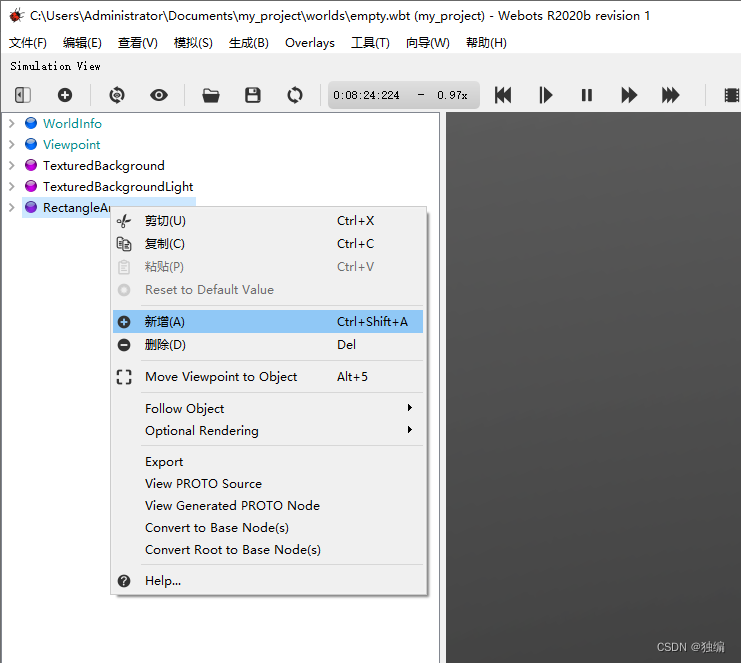
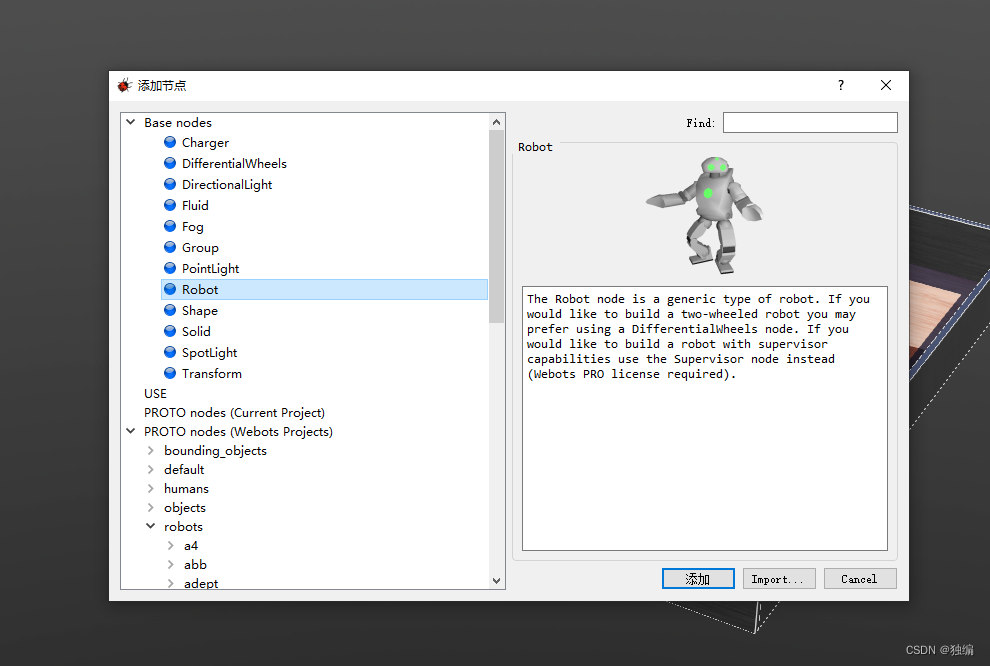
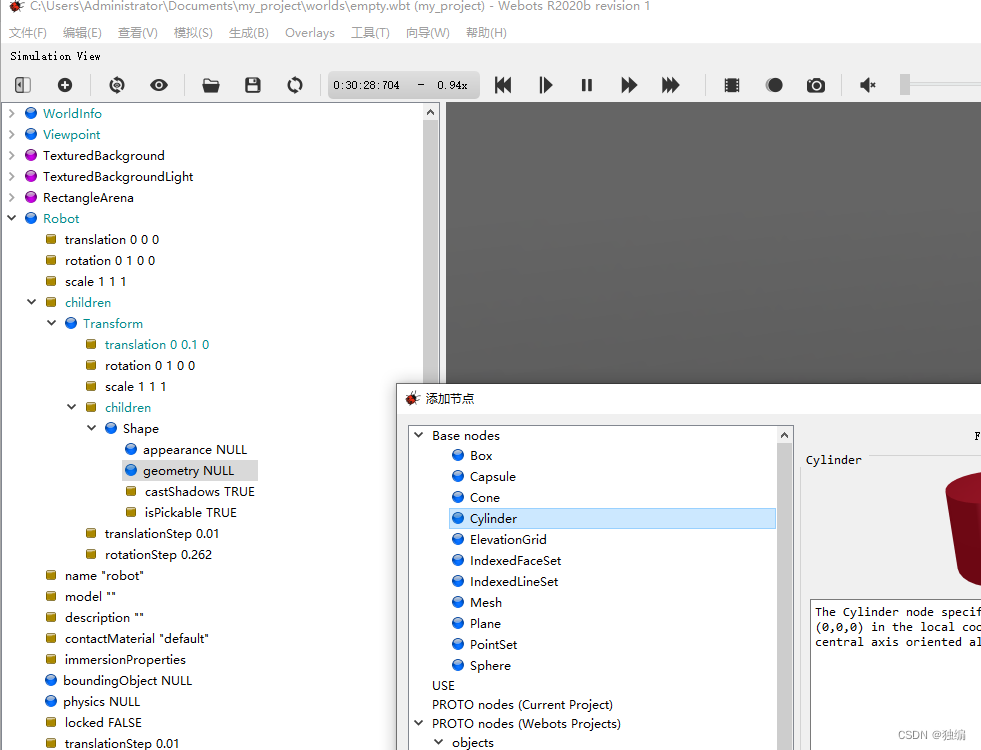
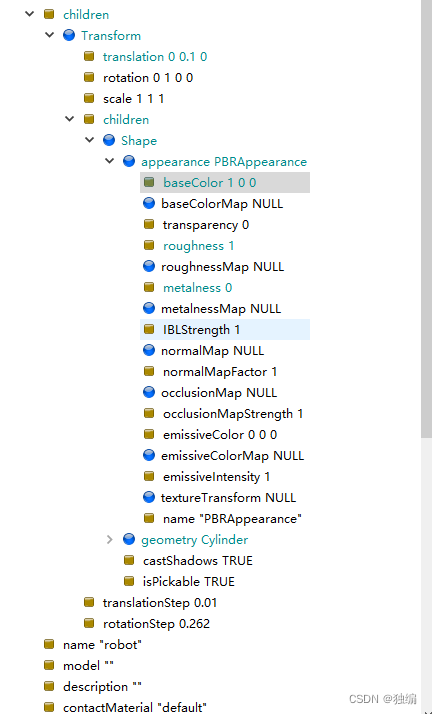

将shape更名为body,将bouningObject设置为body
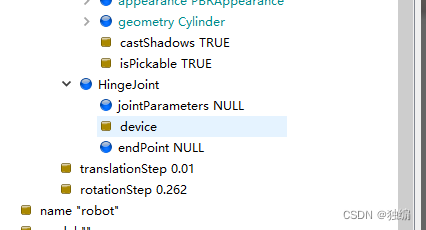
4、建立一个铰链
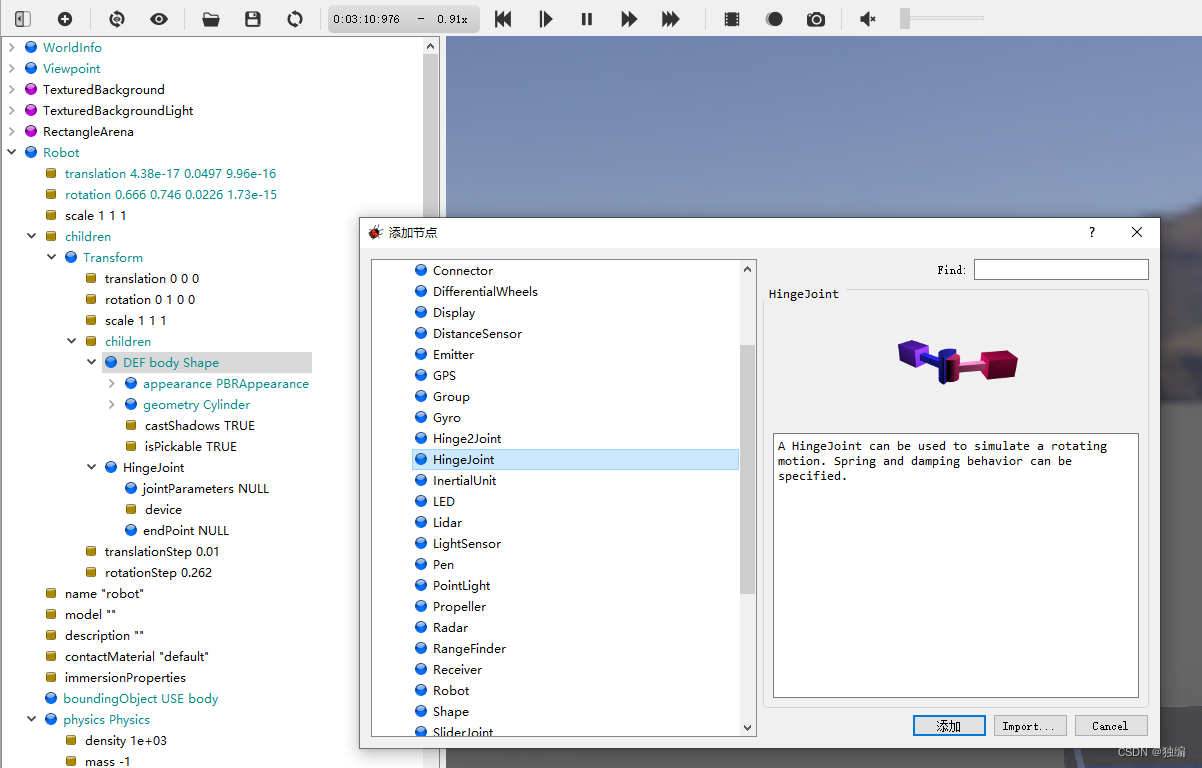
在body新建铰链,然后打开新增的HingeJoint节点,里面有三个属性,第一个是针对主节点的,第二个Device用来添加一个Motor,第三个终端节点就是要添加轮子的节点。
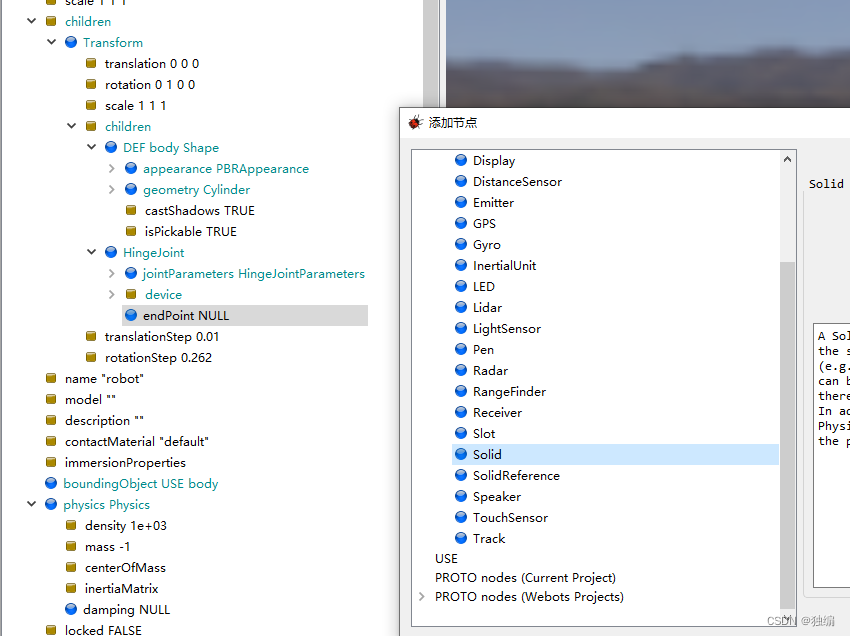
按如下添加节点

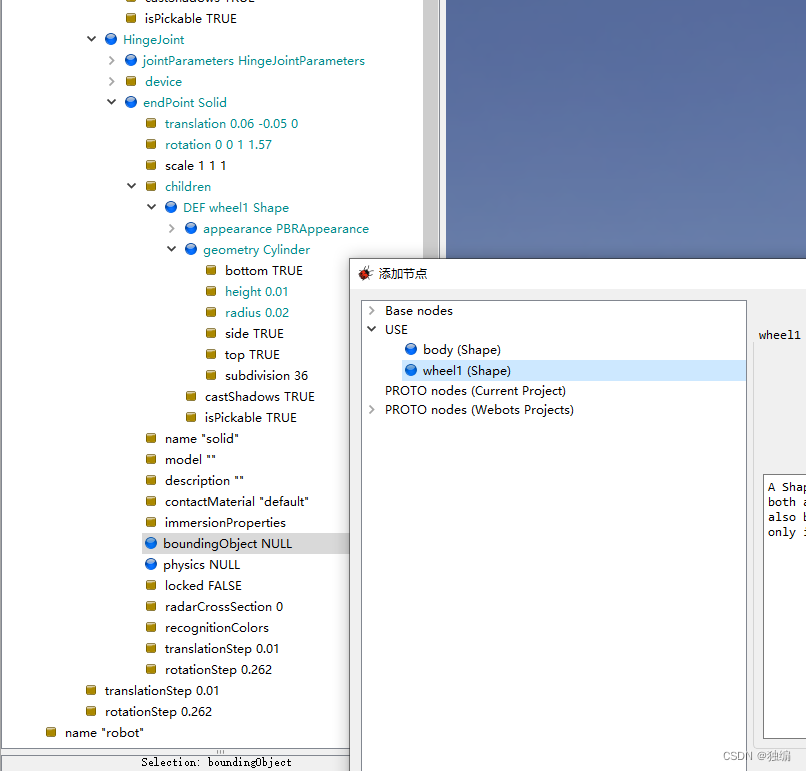
在终端节点中添加轮子,过程如下
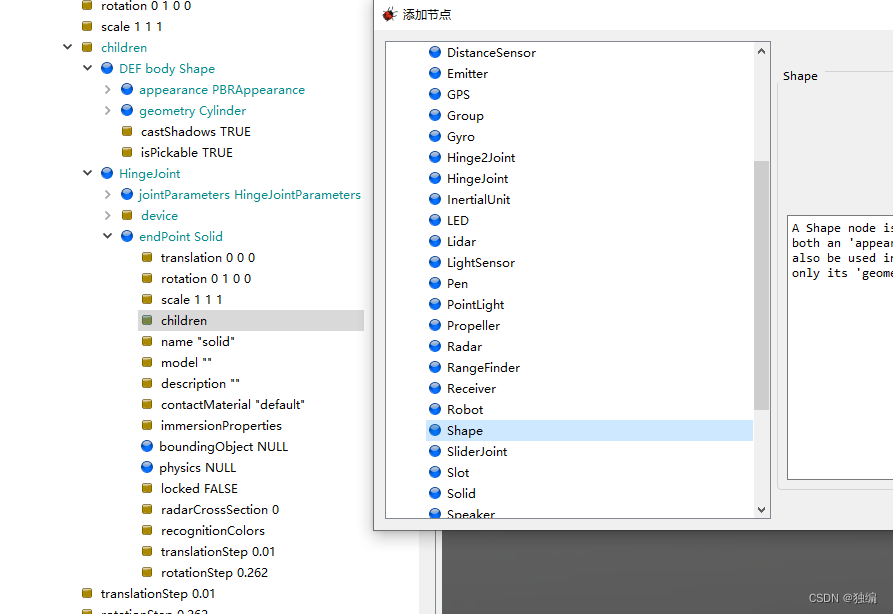
其余步骤与上相同,完成后更改Solid节点的translation与rotation属性,将轮子放在指定的位置上
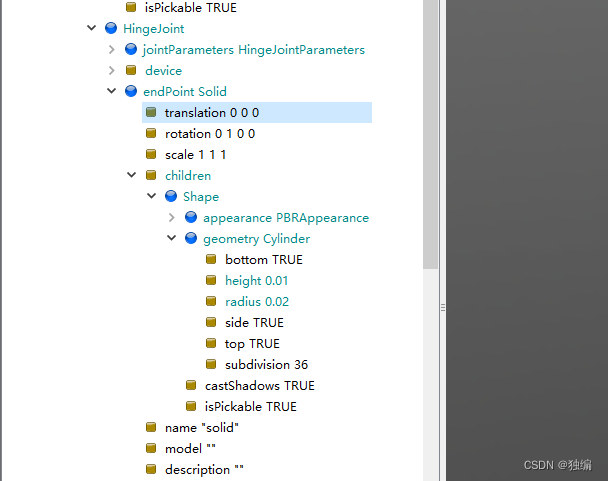
然后给新添加的Shape节点改个名字。这是为了给endPoint节点添加边界属性准备的。在添加boundingObject之后,添加物理属性,同时也给physics属性也改一个名字。
接下来进行铰链关键操作,将endpoint中的translation的数值复制到anchor中作为固定锚点

然后修改axis(旋转轴),通过调整position测试是否正确
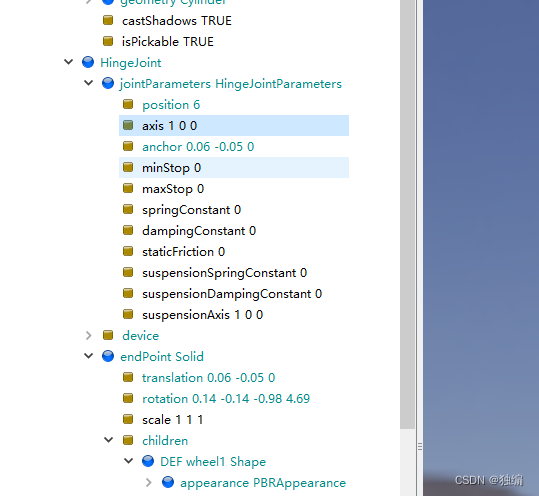
然后可直接将hingejoint复制一份,修改数值得到另一个轮子。
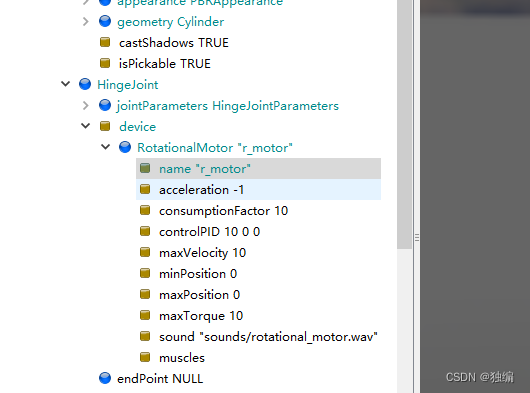
5、使用电机
下图的device中的rotationalmotor为旋转电机,修改其名称方便后续调用
6、各种传感器
可以在机器人上添加一个固体后,再添加传感器,将传感器固定在所添加的固体上。