

但是随着量化、剪枝等模型压缩技术的进步,以及手机等终端设备的算力、带宽、内存持续增大。使得大模型在终端设备部署也成为的可能。大模型在终端部署可以有效保护用户隐私,而且终端设备日常广泛使用、用户可以随时随地生成想要的内容。

本文是深度学习推理引擎MNN团队,做的Stable Diffusion端侧部署应用,代码开源,用户可以自行DIY各种好玩的Stable Diffusion应用。
MNN开源地址:
https://github.com/alibaba/MNN/tree/master
欢迎大家试用,使用教程如下:
https://mnn-docs.readthedocs.io/en/latest/transformers/diffusion.html
下面是在个人手机/电脑上生成的图片:



技术要点
▐ Self-Attention优化
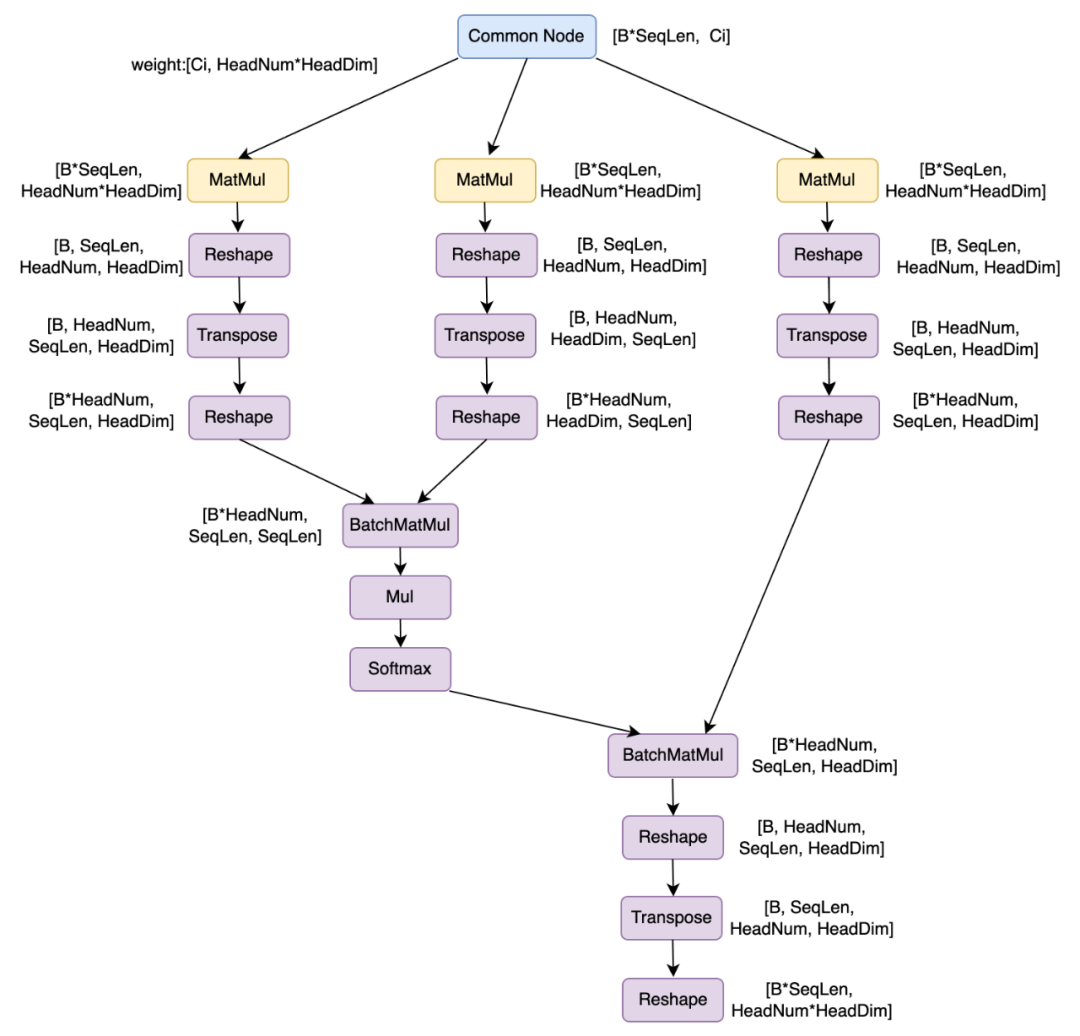
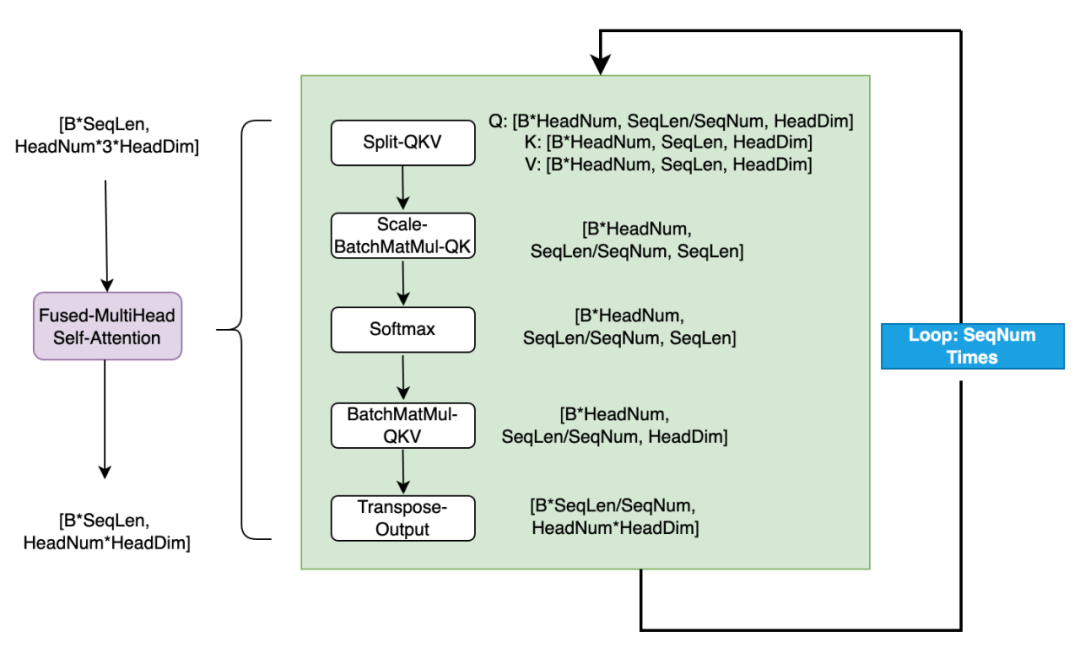
一个共有节点,分别经过三个Linear层,得到Query/Key/Value,Query/Key经过形状变换进行BatchMatMul操作,再进行Scale,取Softmax操作;该结果和Value经过形状变换做BatchMatMul;之后把结果进行形状变换,得到最终的输出。可以看到上述总共有19个算子,包括12个形状变化算子,7个计算型算子。
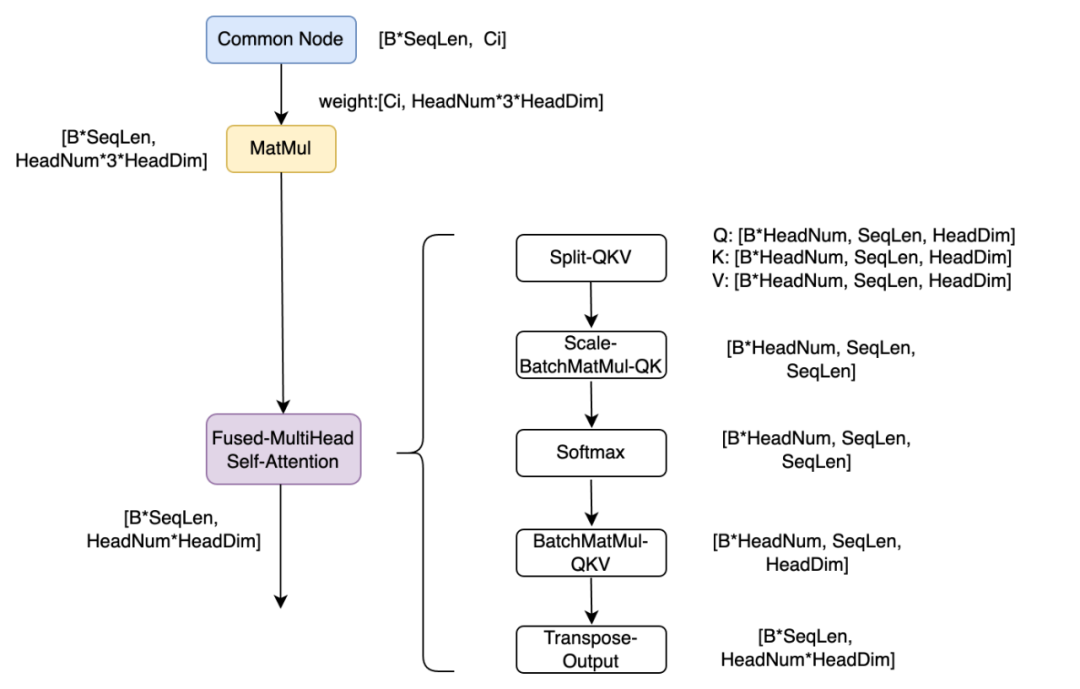
大量的形状变化会带来很多的访存耗时,对于GPU高算力的硬件来说,访存耗时往往容易成为热点。因此,将上述结构,融合成2个算子,第一个是将三个Linear层权重融合在一起,只做一个Linear,这样形成更大的矩阵乘尺寸,更容易打满GPU算力,带来性能收益;第二个算子是将Attention算子融合成一个算子Fused-MultiHead-Attention,融合之后在该新算子内部仅需5个Kernel就可以实现整个Attention功能。消除了大量额外的形状变换算子,降低了访存压力,同时可以更容易基于Attention算子特性做进一步优化工作。
▐ GroupNorm/SplitGeLU融合

可以看到GroupNorm采用InstanceNorm+形变算子实现,gamma/beta被单独拆解为mul/add算子,细碎的算子会增加全局内存的访存次数、以及Kernel launch的压力。因此将上述通用结构合并成一个GroupNorm算子,该算子把前面的BroadCast Binary和后续的SiLU激活函数,融合在一起。高效的只需一个Kernel就可以实现上述计算需求。
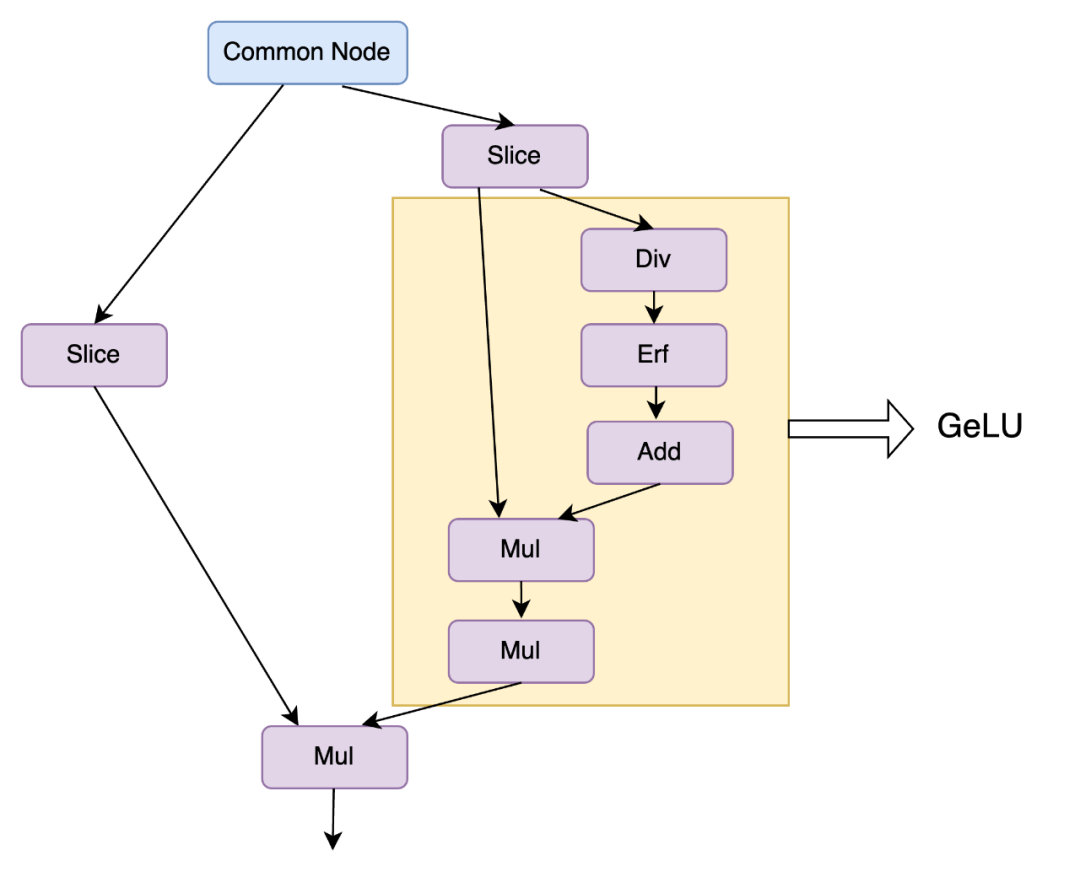
同样的图融合原理,在Transformer激活函数中,Stable Diffusion Feed-Forward模块中采用GEGLU结构,对应onnx图结构如下。将该8个onnx图算子,融合为通用的SplitGeLU算子。
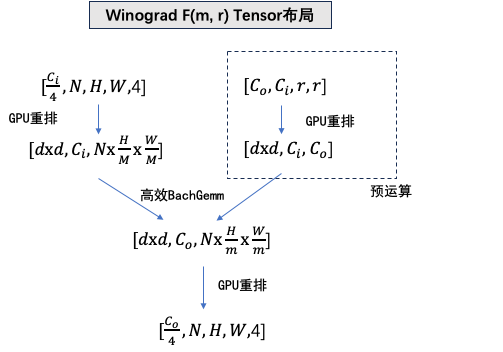
▐ conv-winograd算法实现
在Stable Diffusion中有大量3x3卷积,在深度学习中,Winograd算法已经大量应用在加速3x3卷积实现。
Winograd F(m, r)算法,其中m代表一个计算tile的大小,r对应filter的尺寸,d=m+r-1 代表对应input tile大小。
m |
r |
d |
计算量前后比例 |
input中间内存 |
weight中间内存 |
2 |
3 |
4 |
9 : 4 = 2.25x |
4x |
1.78x |
4 |
3 |
6 |
4 : 1 = 4x |
2.25x |
4x |
6 |
3 |
8 |
81 : 16 = 5.06x |
1.78x |
7.11x |
▐ 高性能Gemm/BatchGemm
上述分析可以看出,Attention/卷积3x3,核心计算量在BatchGemm上,Linear层实际上就是Gemm运算。实际上,Stable Diffusion中,核心的计算量或者说耗时的热点,归根溯源,都集中在Gemm/BatchGemm上。如何高效实现矩阵乘法 成为最核心的关键。
矩阵乘在各个维度上的分块策略,可以有效提升数据的复用度和数据cache命中率;合理的分块可以为矩阵乘法带来大幅度的性能提升。
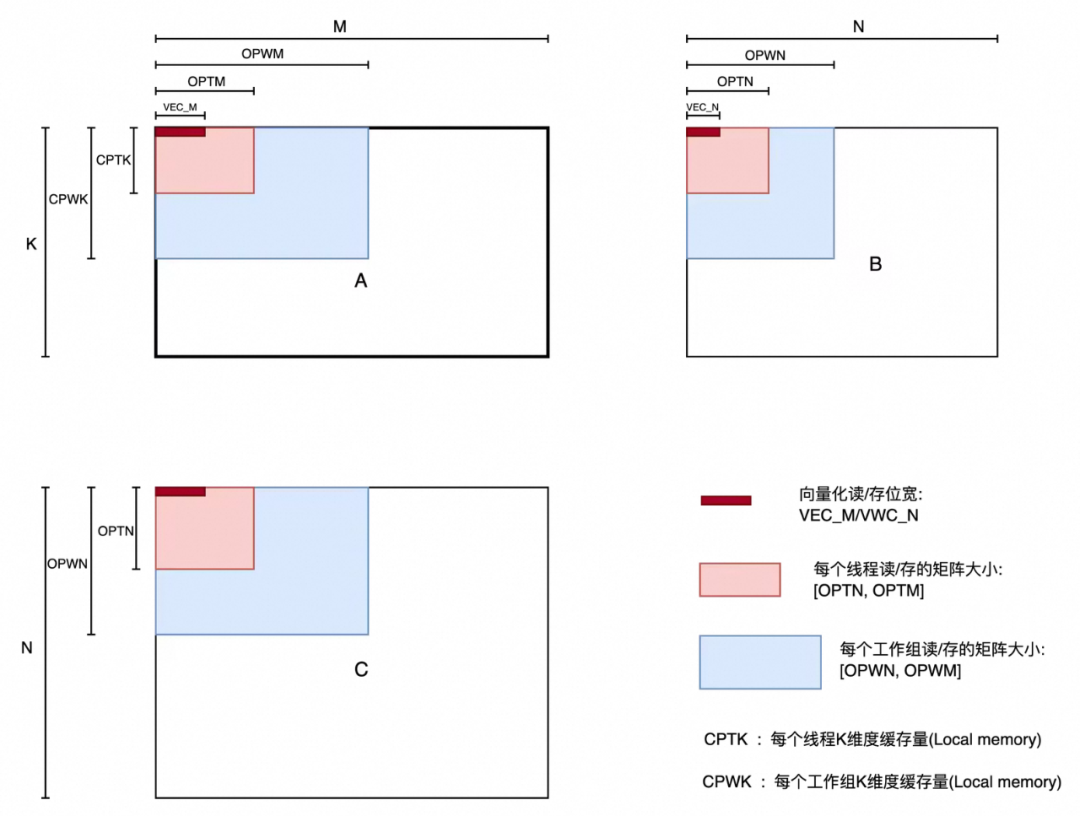
上图展示了,矩阵乘在各个维度上面的分块变量,包括在并发M/N维度,单次数据访存向量化位宽、每个线程存取矩阵的尺寸、每个工作组存取矩阵的尺寸,以及如果使用local memory缓存的话每个线程/工作组的缓存量。
这些参量都决定了数据访存的效率、并发量的大小、计算访存比的大小。不同的设备有不同的寄存器资源、共享内存资源、访存带宽、计算核心数,这些参量都决定着矩阵乘法的性能效率。
对于特定的矩阵乘的尺寸M/N/K,针对特定设备采取Auto-Tuning的获取最佳的运行参数(OPWM/OPWN/OPTM/OPTN/VEC_M/VEC_N等),Tuning候选集数量是M的N次方(N是参数的个数、M是每个参数候选集个数)。如果暴力循环每个参数候选集,由于候选集数量巨大、并且大尺寸矩阵乘本身单次运行耗时较大,必然会导致要花费大量时间去Tuning完所有候选集。因此,根据经验和实际试跑,选出部分高频参数候选集进行Tuning,在控制好Tuning时间的同时,也可以带来极大的性能收益。
▐ Gemm Strassen探索
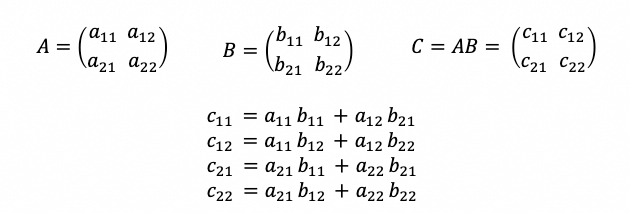
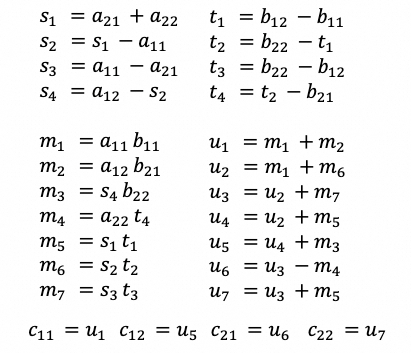
当N足够大时,矩阵加减法耗时会远低于矩阵乘法耗时,带来12.5%的计算量降低。当N较小时,受限于15次 子矩阵加减的 耗时,以及拆解子矩阵乘法算力打不满等损耗原因,将引起负优化。具体某个形状的矩阵乘法适不适合使用Strassen算法?
对于矩阵A形状为[M, K], 矩阵B形状为[N, K],输出矩阵C形状为[M, N]。15次子矩阵加减,数据访存量为:(3*M*K + 3*N*K + 3.5*M*N) * sizeof(DataType) Bytes。1次子矩阵乘法,数据计算量为:1/8 * M*N*K * 2 = 1/4 * M*N*K FLOPS。我们默认矩阵加减是带宽瓶颈,矩阵乘法是算力瓶颈。假设设备的内存带宽为X GB/s,算力是Y GFLOPS。
子矩阵加减耗时:(6*M*K + 6*N*K + 3.5*M*N)*sizeof(DataType) / X (ns)
子矩阵乘节省耗时:(1/4 * M * N * K) / Y (ns)
当节省的耗时大于损耗耗时,即可有性能收益。根据上述公式,计算访存比越低的设备,Strassen算法越容易有收益。对于手机设备来说,1024x1024x1024的子矩阵,通常可以获得约10%的性能收益。
▐ 内存占用优化

性能测评
MNN Stable Diffusion应用,生成512x512图片,在骁龙8Gen3上使用GPU float16精度达到2s/iter (20次迭代,手机上40s可以生成完一幅图),在Apple Mac M3上GPU float32精度达到1.1s/iter (20次迭代,Mac上22s可以生成完一幅图)。MNN CPU/GPU性能均较大幅度快于如下Stable Diffusion开源框架,例如:
stable-diffusion.cpp
https://github.com/leejet/stable-diffusion.cpp/issues/15
Android OnnxRuntime Stable Diffusion应用
https://github.com/ZTMIDGO/Android-Stable-diffusion-ONNX

后续研究
后续在性能优化和内存优化上面仍然有空间可以挖掘。
性能优化方面:
Conv Winograd采用更大的分块,获取更高的计算量降低收益。
矩阵乘尝试Image存储内存访问模式,提高访存效率。
Attention进一步采用Flash Attention等思路优化。
内存占用优化方面:
采用低比特权重(int8/int4量化)。
在线转换动态内存可复用,Conv Winograd权重尝试采用在线转换。
Attention 采用Flash Attention优化节省中间内存使用。

https://blog.csdn.net/xian0710830114/article/details/129194419
https://github.com/NVIDIA/TensorRT/tree/release/8.6/demo/Diffusion
https://arxiv.org/abs/0707.2347
https://courses.cs.cornell.edu/cs6810/2023fa/Matrix.pdf
https://github.com/CNugteren/CLBlast/tree/master
https://arxiv.org/pdf/1703.06503
https://github.com/leejet/stable-diffusion.cpp/
https://github.com/ZTMIDGO/Android-Stable-diffusion-ONNX

团队介绍
本文分享自微信公众号 - 大淘宝技术(AlibabaMTT)。
如有侵权,请联系 [email protected] 删除。
本文参与“OSC源创计划”,欢迎正在阅读的你也加入,一起分享。