4、整体规划
本系列索引博文:AD系列教程之索引篇文档
这部分呢,需要大家熟悉自己所用的芯片所具有哪些硬件资源,以及你要实现哪些功能,然后根据各个功能去确定相应的实现方案。这部分呢可能就需要大家有一定积累后才能得心应手的规划出自己项目需要使用的解决方案。
这个部分呢,我拿我们的燕骏万能遥控器v1.0的板子作为样本进行简单介绍,后期会有对应的详细说明资料的,敬请期待!
首先需要想当前项目需要哪些功能?好的那么我们的遥控器需要有哪些功能?
- 无线数据发送传输功能
- 重力感应功能,用于动作方式控制飞行器
- 重力感应的相关方向需要给用户一定的提示,进行交互。
- 飞机遥控器需要摇杆进行操作
- 电路板通过开关控制电源通断
- USB串口下载功能和5vUSB供电功能
- 需要预留串口调试排针接口
- 需要swd程序下载接口(可以使用jlink进行仿真调试)
解决方案:
- 无线通信,常用的是NRF24L01、WiFi模块等,然后查找相关资料,看看各个模块的优缺点,进行对比分析。最后确定下使用哪个通信模块,而我们的遥控器v1.0版本呢,预留了这两个模块的接口。
-
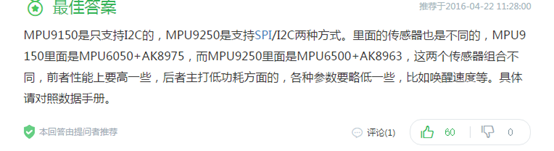
重力感应功能呢,需要姿态传感器,进行姿态检测。我这里直接集成的是9轴姿态传感器MPU9250。而这里呢又有好几种选择方案,比如MPU6050+HMC5883传感器实现,比如MPU9150等。这里需要查找相关资料进行对比参考。
- 当前重力感应是哪个方向的需要给用户一定的提示,比如歪向x轴正方向。这里呢可以使用12864等显示屏幕,但是成本较高。于是我们这里仅仅是使用了6盏LED小灯,进行xyz方向的提示。
- 摇杆的话,需要使用AD,直接淘宝又有多种摇杆比如5k的,比如10k的等。
- USB进行串口通信呢,我们使用的是CH340G 是USB转串口的芯片,相关下载电路呢,我们参考的相关资料。
- 其他等等东西吧,需要大家在以后的学习中慢慢积累。
关于芯片呢,还有芯片选型。这里我一直使用的是STM32CUBE,进行选型。选型需要注意:1、芯片引脚。2、芯片封装。3、芯片硬件资源是否够用,比如有几个定时器几个串口等等。STM32CUBE芯片截图如下:
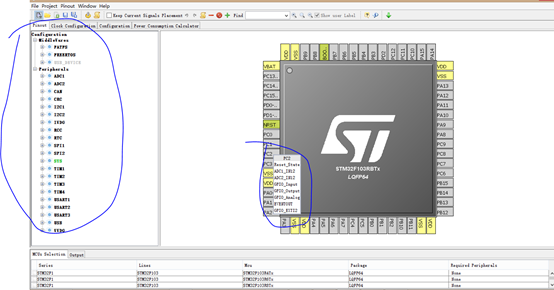
选择相应的芯片就能查看这个芯片有哪些硬件资源,同时能看他有哪些普通IO口。Io口是否够用。
然后我们要初步的规划出我们整个电路图中使用到的芯片的IO口引脚。写一个接口说明文档存根。注意这里仅仅是初步规划,后面我们在pcb布局布线的过程中可能还要修改(为了方便布局布线。)所以说这里是初步规划。
整体规划的能力呢,需要大家在以后的学习中慢慢的积累,慢慢的沉淀。这里仅做简单介绍。