第5组第11周工作报告
成员:陶务业、陈纪君、朱子文、李文超、高帅、马腾、王涛
目录
-
单闭环电路焊接与调试
- 电路分析
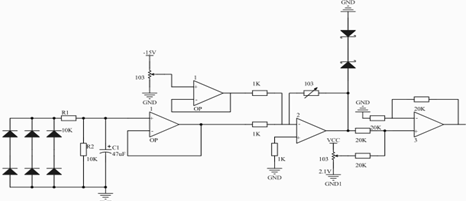
图 1 :电路原理图
电路从左到右依次是:不控整流电路、电压跟随器、给定电压、电压跟随器、比例调节器、加法器电路。最后的输出的结果与3525芯片中的三角载波进行比较。
实际提供的芯片是358,这是一个双运放集成芯片,芯片内部图如下
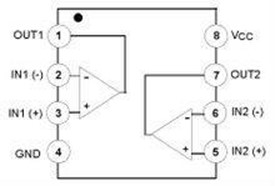
图2 :358运放内部图
我们使用提供的2片集成双运放,其中一个358连接成2个电压跟随器,
另外一个358连接做加法器和比例环节。
-
电路注意事项
-
运放双电源供电,需要芯片GND需要外接-15v电源
-
加法器偏置电压2.1v上面的vcc,从3525芯片16引脚接出
-
电阻焊接到电路后,不能直接用万用表测量电阻(会有并联串联关系)
-
最后的输出电压是连接到3525芯片的运放2端,1和9构成电压跟随器
-
电机励磁必须先上电,然后是控电,最后再上主电,不然烧保险丝
-
-
电路实际调试
-
用万用表测试电压跟随器是否正常
-
调节给定电压,用万用表测量
-
调节比例电阻,测量输出电压,得到比例关系
-
调节基准电压的滑动变阻器,得到精准的2.1v电压
-
经过上面步骤,我们上周二CDIO时,已经将单闭环系统的电路实验完成,我们的给定电压是5v,比例系数是0.5,,加法器偏置电压为2.1v。系统连接完毕后,先上励磁电源和控制电源,最后上主电系统闭环运行正常。改变主电电源电压,相当于给电压扰动,从人感觉上来说,电机转速无明显变化基本稳定。基本说明我们已经成功实现单闭环调速系统的闭环实验。
-
双闭环参数计算与MATLAB仿真
- 设计要求
- 参数计算
参数计算
由单闭环直流调速系统设计可以得到参数:

调节开关频率fs=20kHz,则

-
电流环的设计
若按照对电源电压的抗扰性能为8.11设计,则电流环小时间常数之和为
相应的,电流滤波时间常数可设定为
按典型I型系统设计电流调节器,采用PI调节器,根据零极点对消,可另超前时间常数
若使超调量小于5%,应取
,因此
电流取1.5倍安全裕量,则
于是,ACR的比例系数为
电流环截止频率
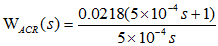
经检验,
满足近似条件,则ACR的传递函数为
-
转速环的设计
设转速滤波时间常数为
,则此时转速环小时间常数为
根据设计要求,选择PI调节器
ASR的超前时间常数为
转速环开环增益为
ASR的比例系数为
此时,截止频率为
经检验,
满足条件,因此,ASR环节传递函数为
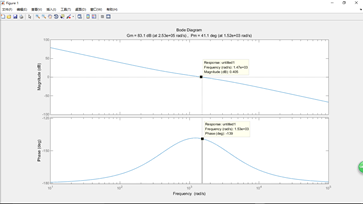
调速系统总的开环传递函数为
对应的bode图如下
- 阶跃信号下PID参数对典型I型2阶系统影响的仿真
这部分是我们的扩展仿真研究,主要从输出波形上定性的分析PID参数对系统的影响,以方便以后我们调试时掌握一定的调试经验。
同时经过仿真分析之后,能加深我们对典型I型系统的理解,当然我们也简单做了下典型II型系统的仿真,这里并没有给出。
这部分实际的理论分析,对应的内容是《电力拖动与控制系统的》书上的P64-P71部分的内容。这部分的理论定量分析,在书上。
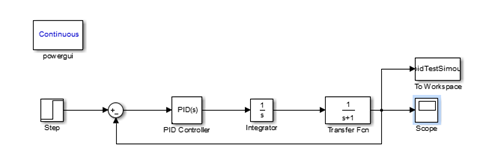
- Simulink仿真框图
2、调试方案(由于是阶跃信号,I型系统无静差)
-
只调节比例系数P 依次为 1、2、4、8、16,观察输出波形
-
不改变P,假设P参数为8,仅仅改变D参数观察波形影响
3、调试波形
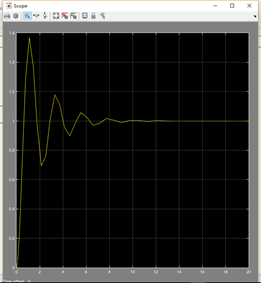
P参数为1
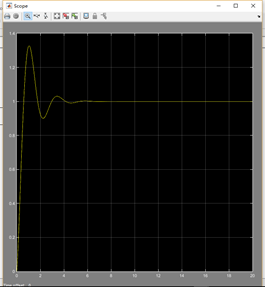
P参数为2
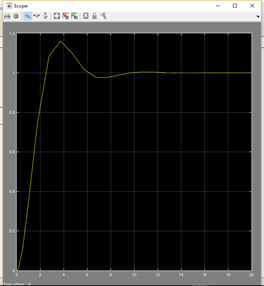
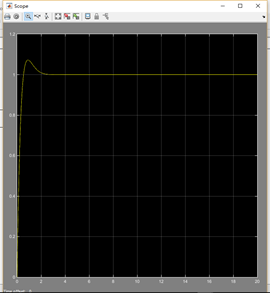
P参数为8
下面改D参数
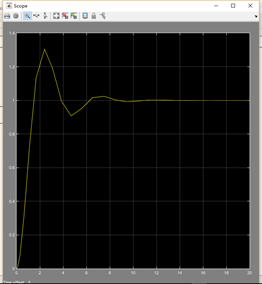
P为8 D为1
P为8 D为4
4、波形分析
比例系数K的影响,其实就是书上P63 64页所讲内容。不过从上面图中,可以形象的看出,K大,快速性更快,但是稳定性降低,超调量增加。D有阻尼的作用,微分能抑制超调。但是延长了上升时间。
主要的定量分析,其实就是书上P63-P71页的内容(典型I和典型II)
- 下周工作计划
目前单闭环MATLAB的bode图以及simulink仿真基本完成,分析后基本正确无误。但是单闭环调速系统的psim仿真貌似还有点小问题
双闭环的仿真框图已经搭建完成,但是双闭环simulink仿真效果不理想,我们下周将进行仿真分析,重新检查检查。
实际单闭环实验电路已经完成
下周工作重点:仿真
-
单闭环psim系统仿真,检查到底哪里出的问题
-
双闭环simulink模型仿真
-
双闭环psim电路仿真与分析