DS1821复位时序

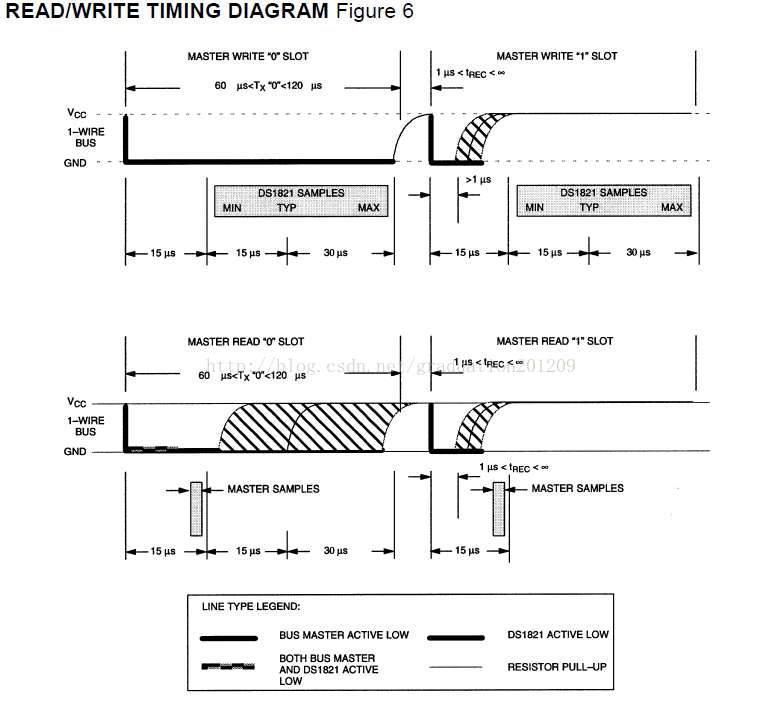
DS1821读写时序
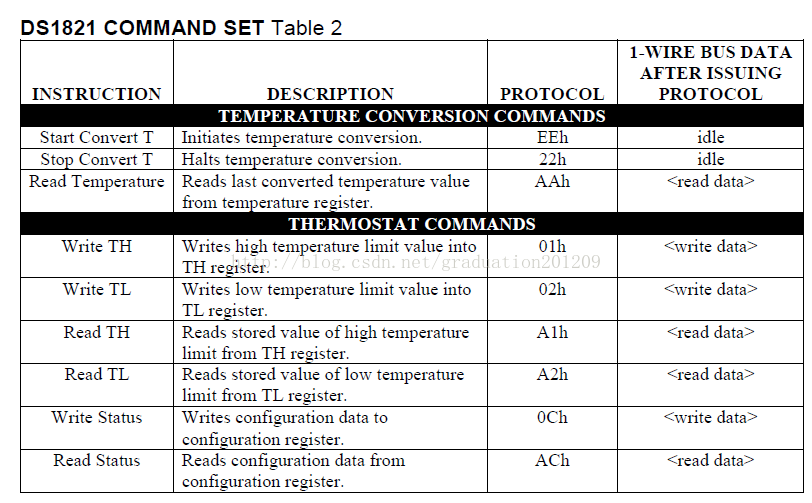
DS1821命令设置
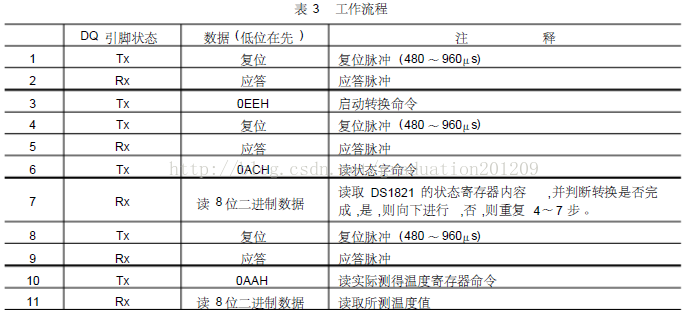
DS1821 工作流程
DS1821 驱动
头文件
#ifndef __DS1821DRIVER_H #define __DS1821DRIVER_H /* ------------------------------------------------------------------------- + | MACROS + ------------------------------------------------------------------------- */ extern char DS1821DriverStateMachine(void); /* ------------------------------------------------------------------------- + | END + ------------------------------------------------------------------------- */ #endif
源文件
/* ------------------------------------------------------------------------- +
| Televic N.V.
+ ------------------------------------------------------------------------- */
/* --------------------------- COPYRIGHT INFORMATION ----------------------- +
| This program contains proprietary information that is a trade secret of
| Televic N.V. and also is protected as an
| unpublished work under applicable Copyright laws. Recipient is to retain
| this program in confidence and is not permitted to use or make copies
| thereof other than as permitted in a prior written agreement with
| Televic N.V.
| (c) Copyright, 2005, Televic N.V.
| All rights reserved. Company confidential.
+ ------------------------------------------------------------------------- */
/* ------------------------------------------------------------------------- +
| Module : MCC
| File name : ds1821_driver.c
| Description :
| Reference(s) : none
+ ------------------------------------------------------------------------- */
/* ------------------------------------------------------------------------- +
| HEADER (INCLUDE) SECTION
+ ------------------------------------------------------------------------- */
#include "ds1821_driver.h"
#include "Timer_user.h"
#include "hhd_sys.h"
#include "hhd_gpio.h"
#include <stdio.h>
#include <string.h>
/* ------------------------------------------------------------------------- +
| EXTERNAL DATA
+ ------------------------------------------------------------------------- */
/* ------------------------------------------------------------------------- +
| TYPE DEFINITIONS (file scope only)
+ ------------------------------------------------------------------------- */
/* ------------------------------------------------------------------------- +
| GLOBAL CONSTANTS
+ ------------------------------------------------------------------------- */
/* ------------------------------------------------------------------------- +
| GLOBAL VARIABLES
+ ------------------------------------------------------------------------- */
/* - Prototypes in header file --------------------------------------------- */
/* - File scope only ------------------------------------------------------- */
#define XTAL 16 //可定义为你所用的晶振频率(单位Mhz)
// #define Delay_10us(x) __delay_cycles ( (unsigned long)(x * XTAL) )
// #define delay_ms(x) __delay_cycles ( (unsigned long)(x * XTAL*1000) )
// #define delay_s(x) __delay_cycles ( (unsigned long)(x * XTAL*1000000) )
char g_ds1821_str[DS1821_LEN] = {',','$', 'T', 'E', 'M', 'P', ',' ,' ',' ', ' ', '*','\r', '\n'};;
// #define W1_PIN (6)
// #define W1_IN PINF
// #define W1_OUT PORTF
// #define W1_DDR DDRF
// #define Delay_10us(x) (x)
// #define DELAY(x) delay(x)
// #define delay(x) Delay_10us(x)
#define DQ PIN8
#define DQ_DIR_IN GPIO_ConfigPinsAsInput(GPIOA, DQ)
#define DQ_DIR_OUT GPIO_ConfigPinsAsOutput(GPIOA, DQ)
#define DQ_H GPIO_SetPin(GPIOA,DQ);
#define DQ_L GPIO_ResetPin(GPIOA,DQ);
/* ------------------------------------------------------------------------- +
| LOCAL FUNCTION PROTOTYPES
+ ------------------------------------------------------------------------- */
/**----------------------------------------------------------------------------
** @Function: ds1821_reset
**
** @Descriptions: Reset ds1821
**
** @parameters:
**
**
**
** @Returned: presence:0 reset ok, presence:1 reset error.
**
** @Author: MCU Application Team
**
** @Date: 2017-08-16
**
-------------------------------------------------------------------------------*/
uint8_t ds1821_reset(void)
{
uint8_t presence, i;
DQ_DIR_OUT; //Set DQ pin as output
DQ_L;
Delay_10us(48); //480us~960us
DQ_H;
// Delay_10us(1); //15~60us wait for DQ to Low
DQ_DIR_IN; //Set DQ pin as input
for(i=0; i<6; i++) //15~60us wait for DQ to Low, ds1821 ack.
{
Delay_10us(1); //10us
presence = GPIO_GetPinState(GPIOA, DQ);
if(presence == 0)
{
//printf("The i = %d\r\n", i);
break;
}
}
//presence = GPIO_GetPinState(GPIOA, DQ);
Delay_10us(48-6); // wait for DQ to High
while((GPIO_GetPinState(GPIOA, DQ)) == 0); // wait for DQ to High
// if(GPIO_GetPinState(GPIOA, DQ) == 0x01)
// rval = GPIO_GetPinState(GPIOA, DQ);
// W1_OUT &= ~(1<<W1_PIN); // One-wire LOW
// W1_DDR |= 1<<W1_PIN;
//
// DELAY( Delay_10us( 480 )); // 480 us
//
// W1_DDR &= ~(1<<W1_PIN);
// DELAY( Delay_10us( 65 )); // Wait 15 + 50 us
// uint8_t err = W1_IN & (1 << W1_PIN ); // Sample bus
//
// DELAY( Delay_10us( 480 - 65 )); // wait until cycle is gone
//
// if( (W1_IN & (1<<W1_PIN)) == 0 ) // check bus for HIGH, othwise we have a short circuit
// err = 1;
return presence;
}
/**----------------------------------------------------------------------------
** @Function: ds1821_bit_read
**
** @Descriptions: read one bit
**
** @parameters:
**
**
**
** @Returned: value:The value to be read
**
** @Author: MCU Application Team
**
** @Date: 2017-08-16
**
-------------------------------------------------------------------------------*/
uint8_t ds1821_bit_read( void )
{
uint8_t value = 0;
DQ_DIR_OUT;
DQ_L;
Delay_10us(1); //10us(1us< t < ∞)
DQ_H; // relase 1-wire
//Delay_10us(1); //10us
DQ_DIR_IN;
value = GPIO_GetPinState(GPIOA, DQ);
Delay_10us(50); //50us
// W1_OUT &= ~(1<<W1_PIN); // One-wire LOW
// W1_DDR |= 1<<W1_PIN;
//
// DELAY( Delay_10us( 1 )); // 1 us time
// W1_DDR &= ~(1<<W1_PIN); // One-wire HIGH and use as input
// DELAY( Delay_10us( 14 )); // 14 us
// uint8_t value = W1_IN & (1<<W1_PIN); // sample bus
// DELAY( Delay_10us( 45 )); // 45 us
return value;
}
/**----------------------------------------------------------------------------
** @Function: ds1821_bit_write
**
** @Descriptions: write one bit
**
** @parameters:
**
**
**
** @Returned: none
**
** @Author: MCU Application Team
**
** @Date: 2017-08-16
**
-------------------------------------------------------------------------------*/
void ds1821_bit_write( uint8_t b )
{
DQ_DIR_OUT;
DQ_L;
Delay_10us(2); //10us
if(b)
{
DQ_H;
}
else
{
DQ_L;
}
Delay_10us(5);
DQ_H; //realse 1-wire
// W1_OUT &= ~(1<<W1_PIN); // One-wire LOW
// W1_DDR |= 1<<W1_PIN;
// DELAY( Delay_10us( 10 )); // 10 us
// if ( b )
// {
// W1_DDR &= ~(1<<W1_PIN); // One-wire input
// DELAY( Delay_10us( 5 + 45 )); // in total 60 us
// }
// else
// {
// DELAY( Delay_10us( 5 + 45 )); // 60 us in total
// W1_DDR &= ~(1<<W1_PIN); // One-wire HIGH and use as input
// }
}
/**----------------------------------------------------------------------------
** @Function: ds1821_read
**
** @Descriptions: read x bit
**
** @parameters: bits: Specifies the number of bits to read
**
**
**
** @Returned: none
**
** @Author: MCU Application Team
**
** @Date: 2017-08-16
**
-------------------------------------------------------------------------------*/
int ds1821_read( uint8_t bits)
{
uint8_t i = bits;
int value = 1 << (bits-1);
int b = 0;
do
{
b >>= 1;
if( ds1821_bit_read() ) //first read LSB
b |= value;
} while( --i );
return b;
}
/**----------------------------------------------------------------------------
** @Function: ds1821_byte_rd
**
** @Descriptions: read one byte
**
** @parameters: bits: Specifies the number of bits to read
**
**
**
** @Returned:
**
** @Author: MCU Application Team
**
** @Date: 2017-08-16
**
-------------------------------------------------------------------------------*/
char ds1821_byte_rd( void )
{
return (char) ds1821_read(8);
}
/**----------------------------------------------------------------------------
** @Function: ds1821_byte_wr
**
** @Descriptions: read one byte
**
** @parameters: bits: Specifies the number of bits to read
**
**
**
** @Returned:
**
** @Author: MCU Application Team
**
** @Date: 2017-08-16
**
-------------------------------------------------------------------------------*/
void ds1821_byte_wr( uint8_t b )
{
uint8_t i = 8;
do
{
ds1821_bit_write( b & 0x01 );
b >>= 1;
} while( --i );
}
/**----------------------------------------------------------------------------
** @Function: DS1821DriverStateMachine
**
** @Descriptions: Read actual temperature value
**
** @parameters:
**
**
**
** @Returned: ds1821_tmp: Actual temperature value
**
** @Author: MCU Application Team
**
** @Date: 2017-08-16
**
-------------------------------------------------------------------------------*/
char DS1821DriverStateMachine(void)
{
char ds1821_tmp = 0;
char temp;
uint8_t status = 0;
do
{
temp = ds1821_reset();
//printf("The temp = %x \r\n", temp);
}while(temp!=0);
printf("The temp Sensor have been checked\r\n");
ds1821_byte_wr(0xee); // start conversion
do
{
temp = ds1821_reset();
//printf("The temp = %x \r\n", temp);
}while(temp!=0);
ds1821_byte_wr(0xAA); // Reads last converted temperature value
ds1821_tmp = ds1821_byte_rd(); // low byte
// ds1821_byte_wr(0xA1);
// status = ds1821_read(8);
// printf("The status = %x \r\n", status);
// do
// {
// temp = ds1821_reset();
// //printf("The temp = %x \r\n", temp);
// }while(temp!=0);
// ds1821_byte_wr(0xA2);
// status = ds1821_read(8);
// printf("The status = %x \r\n", status);
ds1821_byte_wr(0x22); // stop conversion
return ds1821_tmp;
}
/* ------------------------------------------------------------------------- +
| END
+ ------------------------------------------------------------------------- */
main.c
/*
* Copyright(C) 2017,HaiWei
* ALL rights reserved.
*
* @file main.c
* @author MCU Application Team
* @version V0.1
* @date 9-June-2015
* @brief
*
*/
/* Includes ------------------------------------------------------------------*/
#include<string.h>
#include<stdio.h>
#include "hhd32f1xx.h"
#include "hhd_sys.h"
#include "hhd_uart.h"
#include "hhd_gpio.h"
#include "hhd_adc.h"
#include "hhd_spi.h"
#include "hhd_iic.h"
#include "system_user.h"
#include "USART_user.h"
#include "ADC_user.h"
#include "SPI_user.h"
#include "I2C_user.h"
#include "GPIO_user.h"
#include "Timer_user.h"
#include "8255.h"
#include "task.h"
#include "ds1821_driver.h"
//#include "delay.h"
//#include "sys.h"
/*--------------------------Private define-------------------------*/
//#define GPIO_IN_TEST 0
//#define GPIO_OUT_TEST 1
//#define UART_TEST 2
//#define IO_EXTI 3
#define ADC_TEST 4
//#define SPI_TEST 5
//#define I2C_TEST 6
//#define ADC_TEMP 7
#define TIM_5S 500 //10ms x 500 = 5s
/*--------------------------Function volitale-------------------------*/
uint32_t val = 0;
extern uint16_t TimerCnt , gTimerFlag;
/*--------------------------Function declare-------------------------*/
void NVIC_Init(void);
void DeviceInit(void);
/**----------------------------------------------------------------------------
** @Function: main
**
** @Descriptions:
**
** @parameters:
**
**
**
** @Returned: none
**
** @Author: MCU Application Team
**
** @Date: 2017-07-14
**
-------------------------------------------------------------------------------*/
int main(void)
{
char temp = 0;
DeviceInit();
TimerCnt = TIM_5S;
while(1)
{
//UART_Test();
//ADC_Test();
// SPI_Test();
// I2C_Test();
// IO_EXTI_Test();
// GPIO_Test();
// ADC_TempSensor();
// if(gTimerFlag == 1)
// {
// TimerCnt = TIM_5S;
// gTimerFlag = 0;
// }
//delay_us(2000000);
Delay_10us(100000); //1s
GPIO_InvertOutPin(GPIOB, PIN9); //LED
temp = 0;
temp = DS1821DriverStateMachine();
printf("The tempretrue is:%d ℃\r\n", temp);
// GPIO_InvertOutPin(GPIOC, PIN6); //LED
// delay_us(2000000);
// NVIC->IP[0] = 0xff;
// val = NVIC->IP[0] ;
// printf("The NVIC->IP[0] = %x\r\n", val);
// val = NVIC_GetPriority(TIM2_IRQn);
// printf("TIM2_IRQn = %x\r\n", val);
// val = NVIC_GetPriority(UART1_IRQn);
// printf("UART1_IRQn] = %x\r\n", val);
}
}
/**----------------------------------------------------------------------------
** @Function: DeviceInit
**
** @Descriptions:
**
** @parameters:
**
**
**
** @Returned: none
**
** @Author: MCU Application Team
**
** @Date: 2017-07-14
**
-------------------------------------------------------------------------------*/
void DeviceInit(void)
{
/* ----------- System initialization -------------------------------------*/
SYS_SystemInitial();
//SystemCoreClockUpdate();
GPIO_Configuration();
//IO_EXTI_Configuration();
USART_Configuration();
//ADC_Configuration();
//I2C_Configuration();
//ADC_TempSensorConfiguration();
//SPI_Configuration();
// VariableInit();
// D8255_Init();
Timer_Configuration();
// delay_init();
NVIC_Init();
NVIC_EnableIRQ(UART1_IRQn);
}
/**----------------------------------------------------------------------------
** @Function: NVIC_Init
**
** @Descriptions:
**
** @parameters:
**
**
**
** @Returned: none
**
** @Author: MCU Application Team
**
** @Date: 2017-07-14
**
-------------------------------------------------------------------------------*/
void NVIC_Init(void)
{
NVIC_SetPriority(UART1_IRQn, 0);
NVIC_SetPriority(TIM2_IRQn, 1);
}