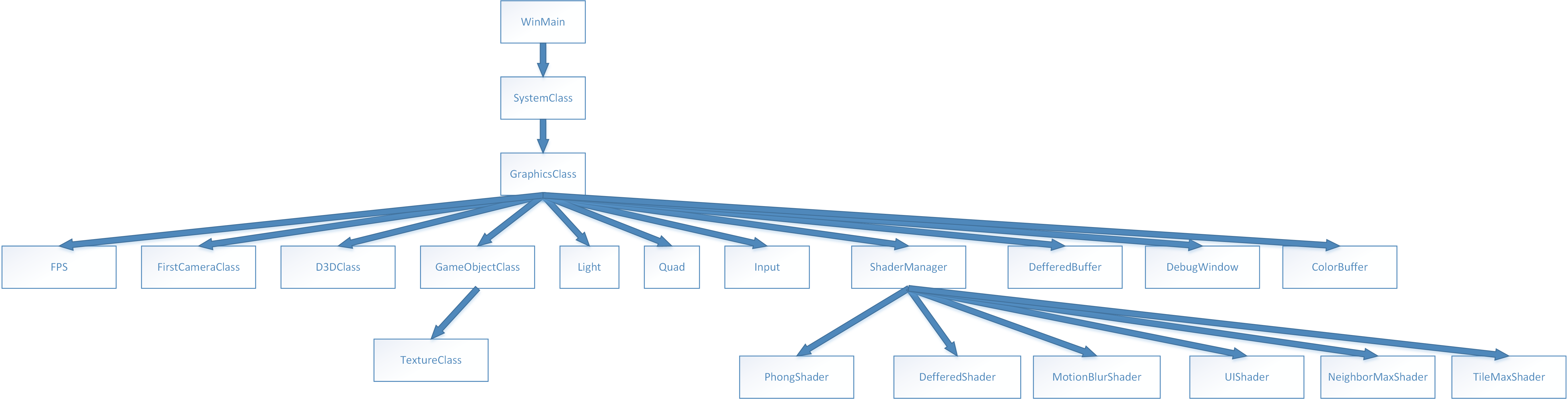
程序结构:
MotionBlur实现过程:
总体分为四个pass:
(1)RenderGbufferPass, 得到colorRT,velocityBufferRT,DepthRT
Texture2D ShaderTexture:register(t0); //纹理资源
SamplerState SampleType:register(s0); //采样方式
static const float EPSILON1 = 0.01f;
static const float2 VONE = float2(1.0f, 1.0f);
static const float2 VHALF = float2(0.5f, 0.5f);
//VertexShader
cbuffer CBCurMatrix:register(b0)
{
matrix curWorld;
matrix curView;
matrix Proj;
matrix WorldInvTranspose;
};
cbuffer CBPreMatrix:register(b1)
{
matrix preWorld;
matrix preView;
};
cbuffer CBOther:register(b2)
{
float halfExpore; //0.5f
float halfExporeXFrame; //FPS的一半
float c_k;
float pad;
}
struct VertexIn
{
float3 Pos:POSITION;
float3 Normal:NORMAL;
float2 Tex:TEXCOORD; //多重纹理可以用其它数字
};
struct VertexOut
{
float4 Pos:SV_POSITION;
float2 Tex:TEXCOORD1;
float4 curClipSpacePos:TEXCOORD2;
float4 preClipSpacePos:TEXCOORD3;
};
struct PixelOut
{
float4 color:SV_Target0;
float4 velocity:SV_Target1;
};
float2 writeBiasScale(float2 v)
{
return (v + VONE) * VHALF;
}
VertexOut VS(VertexIn ina)
{
VertexOut outa;
//将坐标变换到齐次裁剪空间
float4 curClipSpacePos = mul(float4(ina.Pos, 1.0f), curWorld);
curClipSpacePos = mul(curClipSpacePos, curView);
curClipSpacePos = mul(curClipSpacePos, Proj);
outa.Pos = curClipSpacePos;
//目前帧的齐次裁剪空间位置
outa.curClipSpacePos = curClipSpacePos;
//前一帧的齐次裁剪空间位置
float4 preClipSpacePos = mul(float4(ina.Pos, 1.0f), preWorld);
preClipSpacePos = mul(preClipSpacePos, preView);
preClipSpacePos = mul(preClipSpacePos, Proj);
outa.preClipSpacePos = preClipSpacePos;
outa.Tex= ina.Tex;
return outa;
}
/*延迟渲染的PixelShader输出的为屏幕上的未经处理的渲染到屏幕的像素和像素对应的法线*/
PixelOut PS(VertexOut outa) : SV_Target
{
PixelOut pout;
//第一,获取像素的采样颜色
pout.color = ShaderTexture.Sample(SampleType, outa.Tex);
float3 curNDCPos = outa.curClipSpacePos.xyz / outa.curClipSpacePos.w;
float3 preNDCPos = outa.preClipSpacePos.xyz / outa.preClipSpacePos.w;
//[-1,1] * FPS,也就是每帧在NDC空间的移动[-1,1]扩大FPS倍
float2 vQX = (curNDCPos - preNDCPos).xy * halfExporeXFrame;
float fLenQX = length(vQX);
float fWeight = max(0.5, min(fLenQX, c_k));
fWeight /= (fLenQX + EPSILON1);
//实现速度在一个范围内
vQX *= fWeight;
pout.velocity = float4(writeBiasScale(vQX),0.5f, 1.0f);
return pout;
}
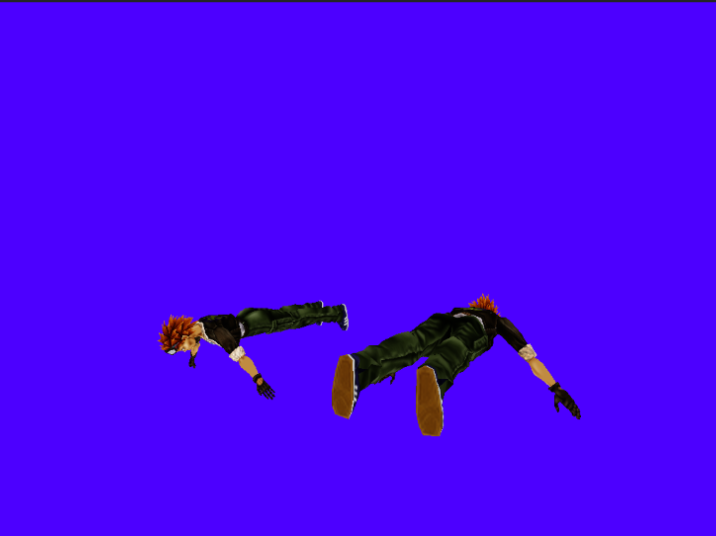
colorRT:
VelocityBufferRT:

(2)RenderTileMaxPass,得到tileMaxVelocityRT

Texture2D velocityRT:register(t0); //纹理资源
SamplerState SamplePointClamp:register(s0); //采样方式
cbuffer CBEveryFrame:register(b0)
{
float c_k;
float3 pad;
};
struct VertexIn
{
float3 Pos:POSITION;
float2 Tex:TEXCOORD; //多重纹理可以用其它数字
};
struct VertexOut
{
float4 Pos:SV_POSITION;
float2 Tex:TEXCOORD0;
};
static const float4 GRAY = float4(0.5f, 0.5f, 0.5f, 1.0f);
static const float2 VONE = float2(1.0f, 1.0f);
static const float2 VTWO = float2(2.0f, 2.0f);
static const float2 VHALF = float2(0.5f, 0.5f);
float2 textureSize(Texture2D tex)
{
uint width, height;
tex.GetDimensions(width, height);
return float2(width, height);
}
float2 readBiasScale(float2 v)
{
return (v * VTWO) - VONE;
}
float2 writeBiasScale(float2 v)
{
return (v + VONE) * VHALF;
}
VertexOut VS(VertexIn ina)
{
VertexOut outa;
outa.Pos = float4(ina.Pos, 1.0f);
outa.Tex= ina.Tex;
return outa;
}
float4 PS(VertexOut outa) : SV_Target
{
float4 color = GRAY;
float2 texCoordBase = outa.Tex;
float2 texCoordIncrement = float2(1.0f, 1.0f) / textureSize(velocityRT);
float fMaxManitudeSquared = 0.0f;
//实现一个像素存储的速度为临近像素存储速度的最大值
for (int s = 0; s < c_k; ++s)
{
for (int t = 0; t < c_k; ++t)
{
float2 texCoords = texCoordBase + float2(s, t) * texCoordIncrement;
float2 texLookup = velocityRT.SampleLevel(SamplePointClamp, texCoords, 0).xy;
float2 velocity = readBiasScale(texLookup);
float fMagitudeSpuard = dot(velocity, velocity);
if (fMaxManitudeSquared < fMagitudeSpuard)
{
color.xy = writeBiasScale(velocity);
fMaxManitudeSquared = fMagitudeSpuard;
}
}
}
return color;
}
(3)RenderNeigborMaxPass,得到NeighborMaxVelocityRT:

Texture2D velocityTileMaxRT:register(t0); //纹理资源
SamplerState SamplePointClamp:register(s0); //采样方式
static const float2 VONE = float2(1.0f, 1.0f);
static const float2 VTWO = float2(2.0f, 2.0f);
static const float2 VHALF = float2(0.5f, 0.5f);
struct VertexIn
{
float3 Pos:POSITION;
float2 Tex:TEXCOORD; //多重纹理可以用其它数字
};
struct VertexOut
{
float4 Pos:SV_POSITION;
float2 Tex:TEXCOORD0;
};
float2 textureSize(Texture2D tex)
{
uint width, height;
tex.GetDimensions(width, height);
return float2(width, height);
}
float2 readBiasScale(float2 v)
{
return (v * VTWO) - VONE;
}
float2 writeBiasScale(float2 v)
{
return (v + VONE) * VHALF;
}
VertexOut VS(VertexIn ina)
{
VertexOut outa;
outa.Pos = float4(ina.Pos, 1.0f);
outa.Tex= ina.Tex;
return outa;
}
float4 PS(VertexOut outa) : SV_Target
{
float4 color = 1;
float2 texcoordBase = outa.Tex;
float2 texCoordIncrement = float2(1.0f, 1.0f) / textureSize(velocityTileMaxRT);
float fMaxMagnitideSpuared = 0.0f;
for (int s = -1; s <= 1; ++s)
{
for (int t = -1; t <= 1; ++t)
{
float2 texCoords = texcoordBase + float2(s, t) * texCoordIncrement;
float2 texLookup = velocityTileMaxRT.SampleLevel(SamplePointClamp, texCoords, 0).xy;
float2 velocity = readBiasScale(texLookup);
float fMagitudeSpuard = dot(velocity, velocity);
if (fMaxMagnitideSpuared < fMagitudeSpuard)
{
float fDisplacement = abs(float(s)) + abs(float(t));
float2 vOrientation = sign(float2(s, t)* velocity);
float distance = vOrientation.x + vOrientation.y;
if (abs(distance) == fDisplacement)
{
color.xy = writeBiasScale(velocity);
fMaxMagnitideSpuared = fMagitudeSpuard;
}
}
}
}
return color;
}
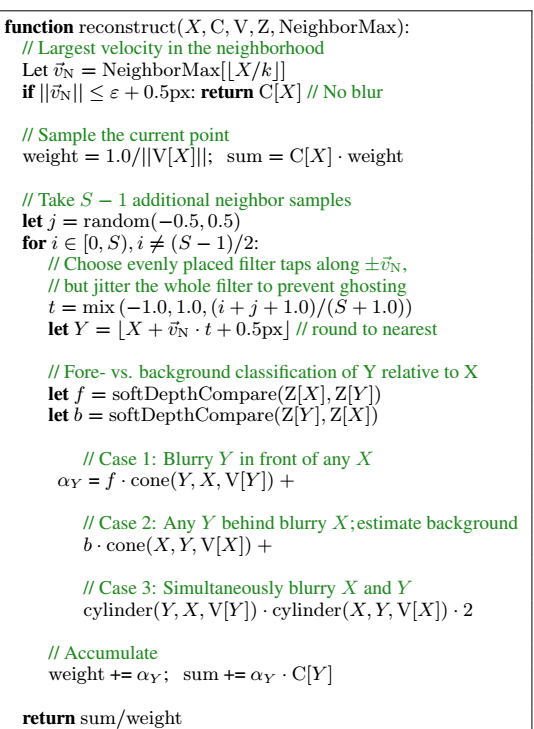
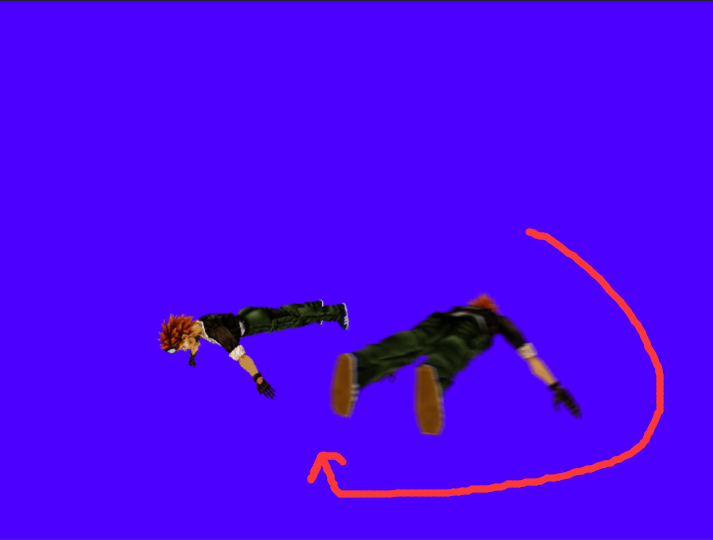
(4)运用多张RT(colorRT,depthRT,VelocityRT,randomRT,neightborMaxRt)运用随机采样重构法,计算移动模糊的像素:
Texture2D colorRT:register(t0);
Texture2D velocityRT:register(t1);
Texture2D neighborMaxRT:register(t2);
Texture2D depthRT:register(t3);
Texture2D randomRT:register(t4);
static const float EPSILON1 = 0.01f;
static const float HALF_VELOCITY_CUTOFF = 0.25f;
static const float VARIANCE_THRESHOLD = 1.5f;
static const float WEIGHT_CORRECTION_FACTOR = 60.0f;
static const float SOFT_Z_EXTENT = 0.10f;
static const float CYLINDER_CORNER_1 = 0.95f;
static const float CYLINDER_CORNER_2 = 1.05f;
static const float2 VHALF = float2(0.5f, 0.5f);
static const float2 VONE = float2(1.0f, 1.0f);
static const float2 VTWO = float2(2.0f, 2.0f);
SamplerState SamPointWarp:register(s0); //采样方式
SamplerState SamLinearClamp:register(s1); //采样方式
SamplerState SamPointClamp:register(s2); //采样方式
cbuffer CBEveryFrame:register(b0)
{
float c_half_exposure;
float c_k;
float c_s;
float c_max_sample_tab_distance;
};
struct VertexIn
{
float3 Pos:POSITION;
float2 Tex:TEXCOORD; //多重纹理可以用其它数字
};
struct VertexOut
{
float4 Pos:SV_POSITION;
float2 Tex:TEXCOORD0;
};
float2 readBiasScale(float2 v)
{
return (v * VTWO) - VONE;
};
float GetDepth(float2 uv)
{
return -(depthRT.SampleLevel(SamPointClamp, uv, 0).r);
};
float psseudoRandom(float2 uv)
{
return randomRT.SampleLevel(SamPointWarp, uv, 0).r - 0.5f;
};
float2 textureSize(Texture2D tex)
{
uint width, height;
tex.GetDimensions(width, height);
return float2(width, height);
};
float softDepthCompare(float za, float zb)
{
return clamp((1.0 - (za - zb) / SOFT_Z_EXTENT), 0.0, 1.0);
};
float cone(float magDiff, float magV)
{
return 1.0f - abs(magDiff) / magV;
};
float cylinder(float magDiff, float magV)
{
return 1.0 - smoothstep(CYLINDER_CORNER_1 * magV, CYLINDER_CORNER_2 * magV, abs(magDiff));
};
VertexOut VS(VertexIn ina)
{
VertexOut outa;
outa.Pos = float4(ina.Pos, 1.0f);
outa.Tex = ina.Tex;
return outa;
}
float4 PS(VertexOut outa) : SV_Target
{
float2 texSize = textureSize(colorRT);
float2 texcoordBase = outa.Tex;
float4 texColor = colorRT.SampleLevel(SamLinearClamp, texcoordBase, 0);
//相邻最大速度变量
float2 nVelocity = readBiasScale(neighborMaxRT.Sample(SamPointClamp, texcoordBase).xy);
float nVelocityLen = length(nVelocity);
float TempNeiVelocity = nVelocityLen * c_half_exposure;
bool flagNVelocity = (TempNeiVelocity >= EPSILON1);
TempNeiVelocity = clamp(TempNeiVelocity, 0.1f, c_k);
//如果速度太小,则直接返回基本的颜色
if (TempNeiVelocity < HALF_VELOCITY_CUTOFF)
{
return texColor;
}
//纠正halfVelocity
if (flagNVelocity)
{
nVelocity *= (TempNeiVelocity / nVelocityLen);
nVelocityLen = length(nVelocity);
}
//速度变量
float2 velocity = readBiasScale(velocityRT.Sample(SamPointClamp, texcoordBase).xy);
float velocityLen = length(velocity);
float TempVelocity = velocityLen * c_half_exposure;
bool flagVelocity = (TempVelocity >= EPSILON1);
TempVelocity = clamp(TempVelocity, 0.1f, c_k);
if (flagVelocity)
{
velocity *= (TempVelocity / velocityLen);
velocityLen = length(velocity);
}
//在【-0.5f, 0.5f】之间的随机值
float r = psseudoRandom(texcoordBase);
//获取深度缓存值
float depth = GetDepth(texcoordBase);
//如果目前片元的速度太小,则使用NeighborMaxVelocity
float2 CorrectedVelocity = (velocityLen < VARIANCE_THRESHOLD) ?
normalize(nVelocity) : normalize(velocity);
//权重值
float weight = c_s / WEIGHT_CORRECTION_FACTOR / TempVelocity;
//累积和
float3 sum = texColor.xyz * weight;
//相同片元的下标
int selfIndex = (c_s - 1) / 2;
float max_sample_tab_distance = c_max_sample_tab_distance / texSize.x;
float2 half_texel = VHALF / texSize.x;
//循环进行重构采样中
for (int i = 0; i < c_s; ++i)
{
//跳过相同的片元
if (i == selfIndex) { continue; }
//T为目前片元和采样片元之间的距离
//采样不是邻居的片元,而是更远的
float lerpAmount = (float(i) + r + 1.0f) / (c_s + 1.0f);
float T = lerp(-max_sample_tab_distance, max_sample_tab_distance, lerpAmount);
//在纠正速度变量和相邻速度变量
float2 Switch = (i & 1 == 1) ? CorrectedVelocity : nVelocity;
//目前采样的位置
float2 newSampleTexcoord = float2(texcoordBase + float2(Switch * T + half_texel));
float2 newVelocity = readBiasScale(velocityRT.SampleLevel(SamPointClamp, newSampleTexcoord, 0).xy);
float newVelocityLen = length(newVelocity);
//纠正,clamp half_velocity
float TempNewVelocity = newVelocityLen * c_half_exposure;
bool flagNewVelocity = (TempNewVelocity > EPSILON1);
TempNewVelocity = clamp(TempNewVelocity, 0.1f, c_k);
if (flagNewVelocity)
{
newVelocity *= (TempNewVelocity / newVelocityLen);
newVelocityLen = length(newVelocity);
}
//新采样点的深度
float newDepth = GetDepth(newSampleTexcoord);
float alphaY = softDepthCompare(depth, newDepth) * cone(T, TempNewVelocity)+
softDepthCompare(newDepth, depth) * cone(T, TempVelocity)+ cylinder(T, TempNewVelocity) * cylinder(T, TempVelocity) * 2.0;
weight += alphaY;
sum += (alphaY * colorRT.SampleLevel(SamLinearClamp, newSampleTexcoord, 0)).xyz;
}
return float4(sum / weight, 1.0f);
}
参考 资料:
【1】NVIDIA SDK 的 AdvancedMotionBlur Sample
【2】McGuire M., Hennessy P., Bukowski M., Osman B.: A reconstruction filter for plausible motion blue. In I3D (2012), pp. 135-142.,非常推荐看这篇paper