NMS广泛应用于目标检测算法中。其目的是为了消除多余的候选框,找到最佳的物体检测位置。
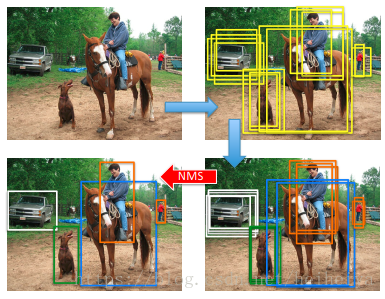
现在假设有有一个候选的boxes的集合B和其对应的scores集合S:
1. 找出分数最高的M;
2. 将M对应的box从B中删除;
3. 将删除的box添加到集合D中;
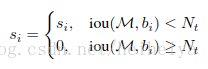
4. 从B中删除与M对应的box重叠区域大于阈值Nt的其他框;
5. 重复上述步骤1-4。
伪代码如下:

其中si可表述为:
Mask RCNN中的python实现:
def non_max_suppression(boxes, scores, threshold):
"""Performs non-maximum suppression and returns indices of kept boxes.
boxes: [N, (y1, x1, y2, x2)]. Notice that (y2, x2) lays outside the box.
scores: 1-D array of box scores.
threshold: Float. IoU threshold to use for filtering.
"""
assert boxes.shape[0] > 0
if boxes.dtype.kind != "f":
boxes = boxes.astype(np.float32)
# Compute box areas
y1 = boxes[:, 0]
x1 = boxes[:, 1]
y2 = boxes[:, 2]
x2 = boxes[:, 3]
area = (y2 - y1) * (x2 - x1)
# Get indicies of boxes sorted by scores (highest first)
ixs = scores.argsort()[::-1]
pick = []
while len(ixs) > 0:
# Pick top box and add its index to the list
i = ixs[0]
pick.append(i)
# Compute IoU of the picked box with the rest
iou = compute_iou(boxes[i], boxes[ixs[1:]], area[i], area[ixs[1:]])
# Identify boxes with IoU over the threshold. This
# returns indices into ixs[1:], so add 1 to get
# indices into ixs.
remove_ixs = np.where(iou > threshold)[0] + 1
# Remove indices of the picked and overlapped boxes.
ixs = np.delete(ixs, remove_ixs)
ixs = np.delete(ixs, 0)
return np.array(pick, dtype=np.int32)