,且 是实数向量,则U是正交矩阵。可知 的行(列)向量都是单位范数并且正交的。
行列式为+1的n维正交矩阵可以看作是n维旋转
正交矩阵的保范性质:
基变换矩阵:
是在基 下的坐标,Y是在基 下的坐标,则
证明: ,所以
可以看出,坐标轴整体旋转 基变换矩阵是正交矩阵(+1) 坐标左乘正交矩阵(+1)。
Givens旋转和RQ分解
RQ分解是A=RQ,R是上三角矩阵,Q是正交矩阵。
Givens旋转:
其中, 。旋转方向都是逆时针,分别是y->z,z->x,x->y。之所以, 有所不同是因为(x,y,z)的坐标现后顺序。
分解步骤:(1) 使 ;(2) 使 ;(3) 使Householder矩阵和QR分解

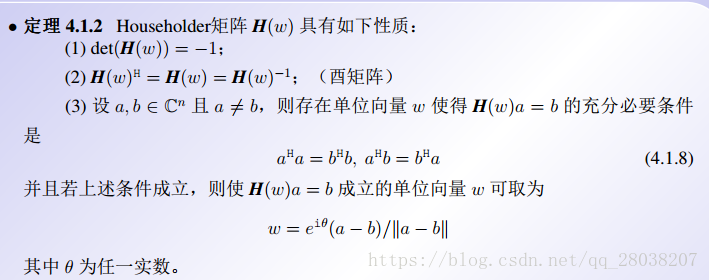
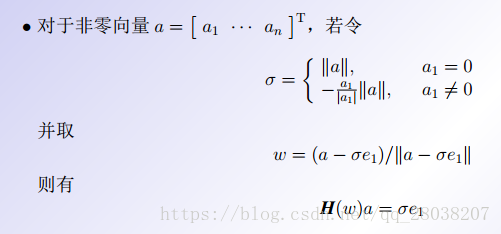
采用Householder矩阵作矩阵乘法时,应利用矩阵的特殊形式来加速计算