OpenCV_海康威视SDK_VS(Visual Studio)2012配置及实时预览(非海康(其他)网络摄像头IPC)二次开发
Python 版本的实现在这篇博客 ❤ o( ̄▽ ̄)d
https://blog.csdn.net/zuliang001/article/details/80882524
下载准备
- OpenCV
https://opencv.org/releases.html (找到如下版本下载,因为我发现新的一些版本不支持VS2012)

- 海康威视SDK
http://www.hikvision.com/cn/download_61.html
下载“设备网络SDK_Win32 ”和“播放库SDK_Windows ”(均下载32位的,因为要使用VS的32位编译器,即便Windows系统是64位的。我只调通了32位编译器的工程,所以很遗憾只能给大家介绍32位的啦o(╥﹏╥)o)
- VS2012,为了减少篇幅略去,自行度娘。
配置前的小插曲(以此判断是否可以读到摄像头)
- 使用SDK中的SADP工具,可以识别摄像头,配置IP与电脑在同一网段。
- 使用SDK中的ClientDemo.exe访问摄像头(添加你的摄像头,可以看到画面啦,激动٩(๑>◡<๑)۶)
正式配置开发环境
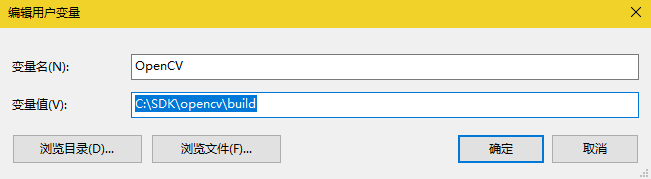
1. OpenCV的配置
1.1 在用户变量里新建变量OpenCV,变量值:C:\SDK\opencv\build;
1.2 在用户变量的Path中添加:C:\SDK\opencv\build\x86\vc11\bin;
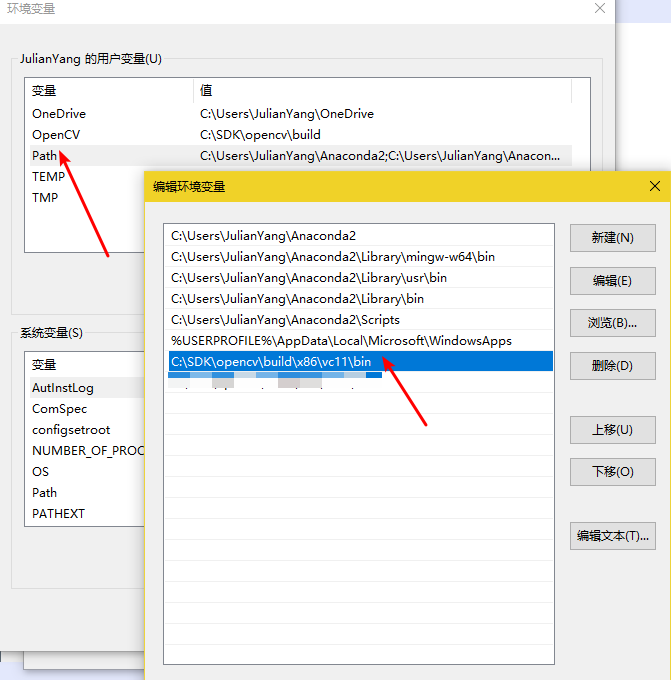
(另,在OpenCV配置中,vc11即对应VS2012,vc12对应的是VS2013。这里x86还是x64的选择跟你的电脑是32位还是64位无关,这里我使用vs2012编译环境为win32编译器,所以选择x86。)
1.3 在系统变量中的Path中也加上;
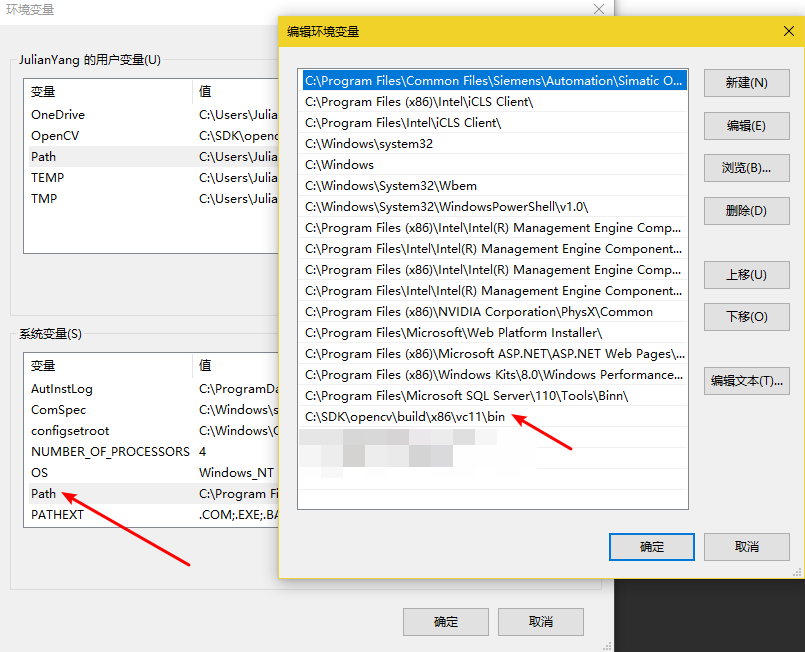 (另,要使用英文输入下的分号和前面已有的路径分开,添加完之后需要重启或注销计算机,环境变量才会生效。)
(另,要使用英文输入下的分号和前面已有的路径分开,添加完之后需要重启或注销计算机,环境变量才会生效。)
1.4 VS2012的工程项目属性配置
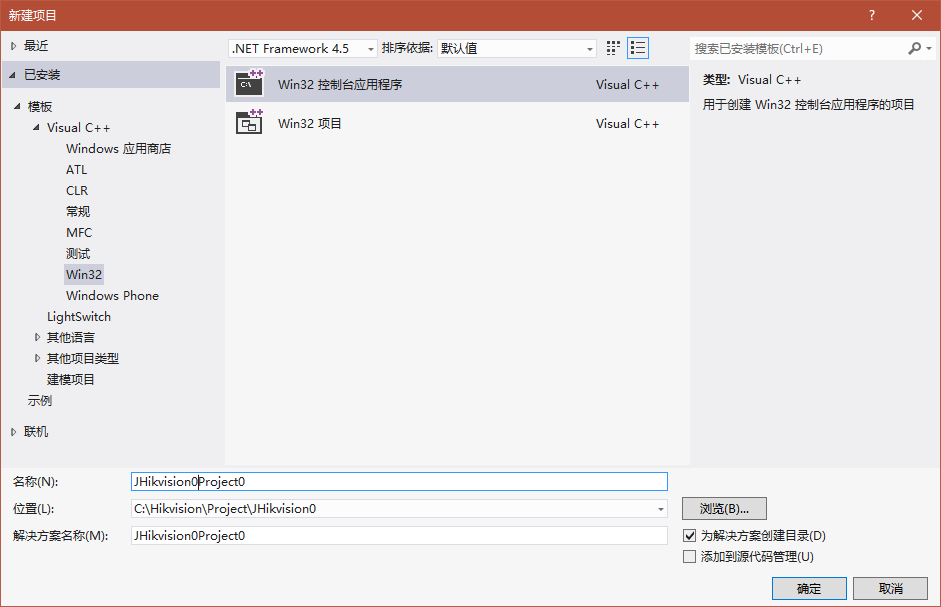
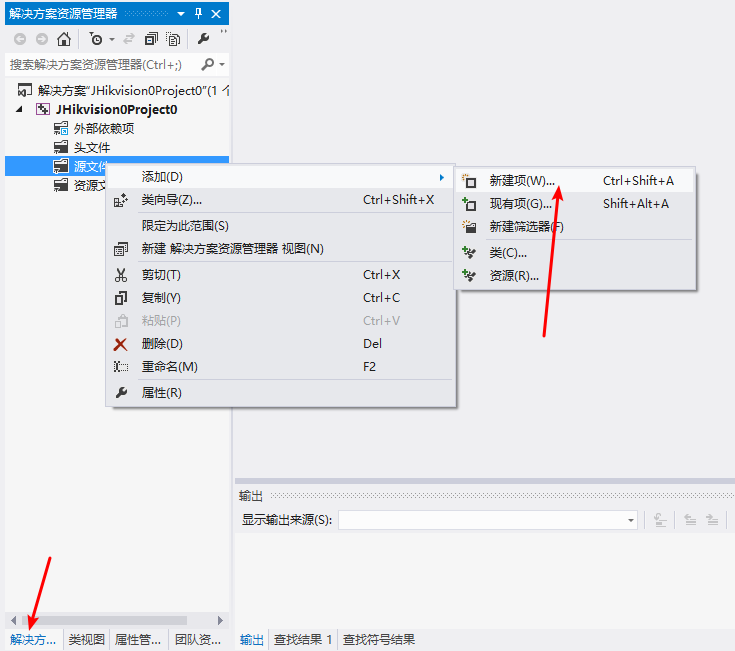
新建Win32控制台应用程序,工程名命名为MyFirstOpenCV,在其后的选项里选择空项目:

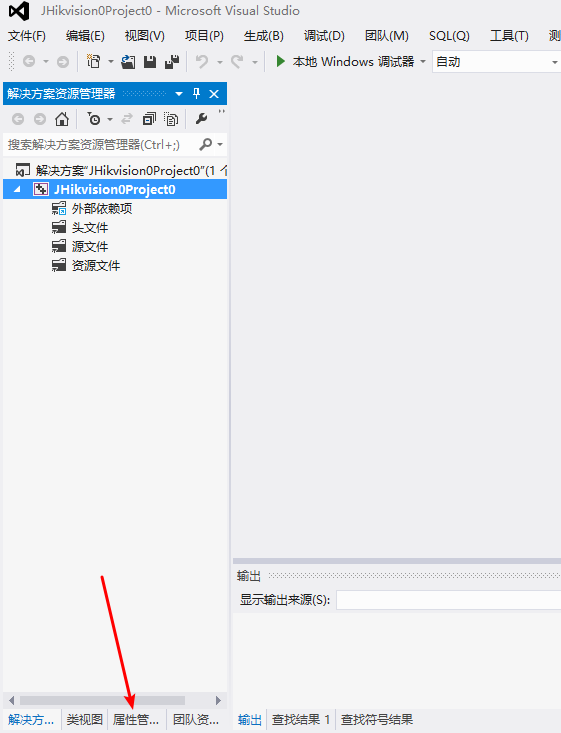
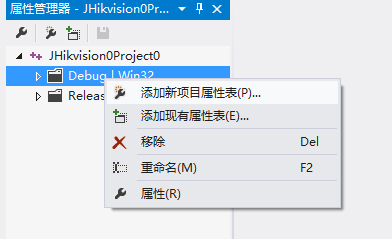
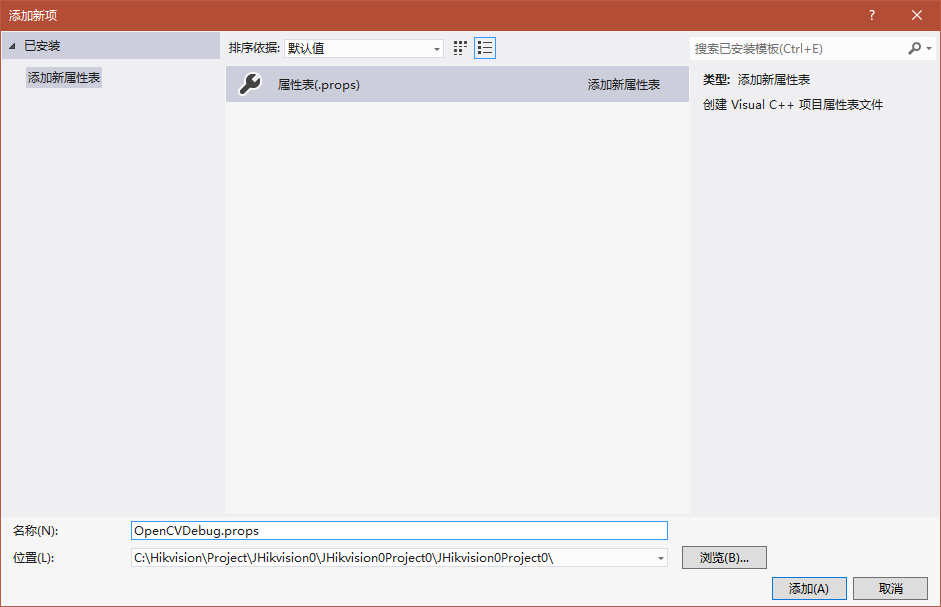
打开“属性管理器”,在属性管理器的Debug|Win32目录上右键单击选择“添加新项目属性表”,新建属性表,并命名为OpenCVDebug
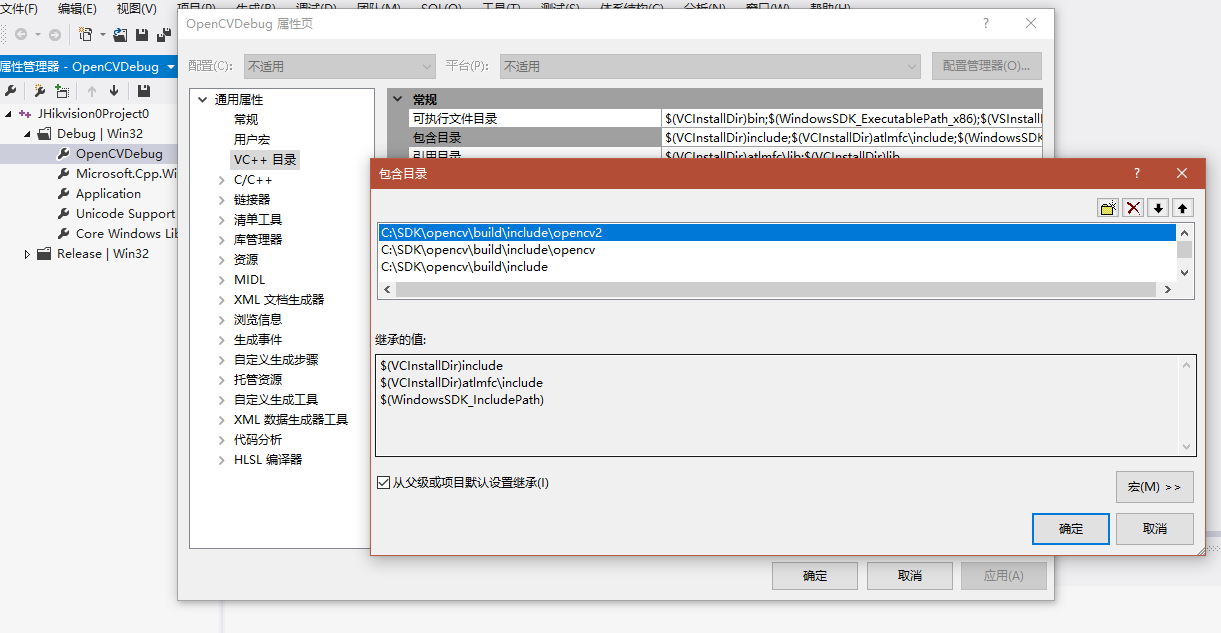
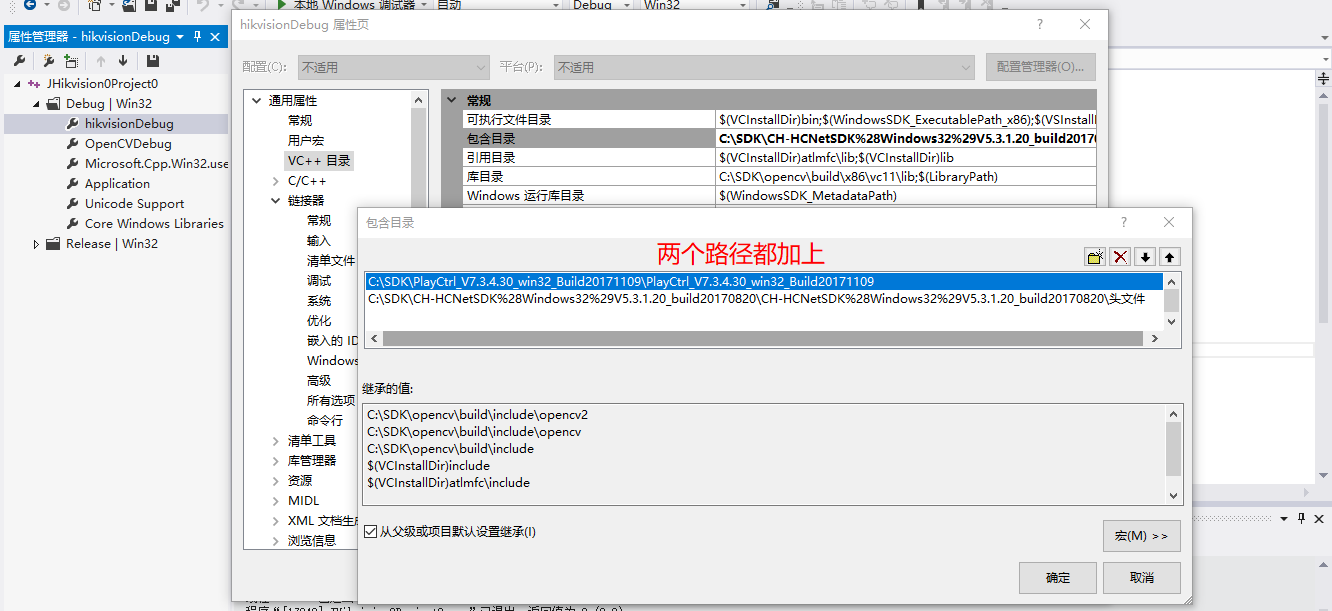
 双击打开属性表OpenCVDebug.props。选择通用属性->VC++目录,在包含目录里添加3个目录:
双击打开属性表OpenCVDebug.props。选择通用属性->VC++目录,在包含目录里添加3个目录:
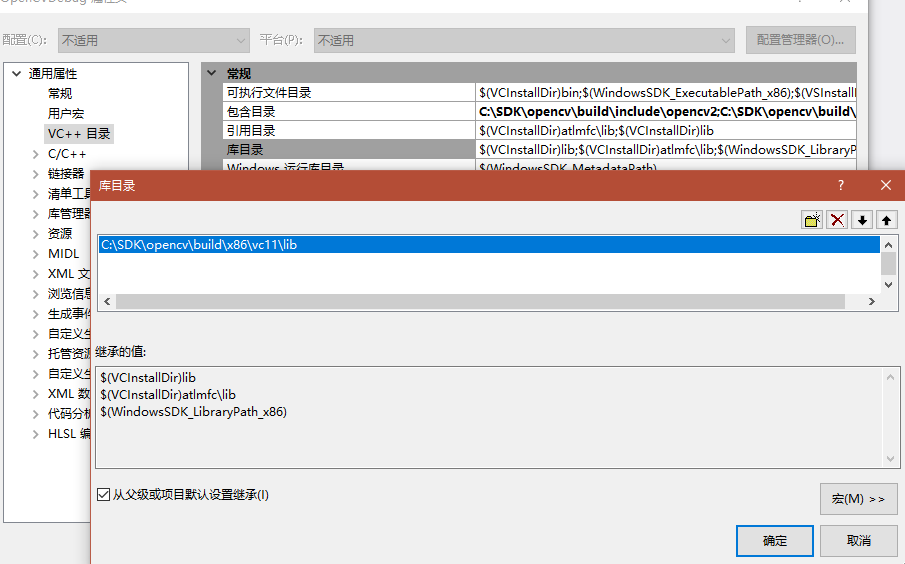
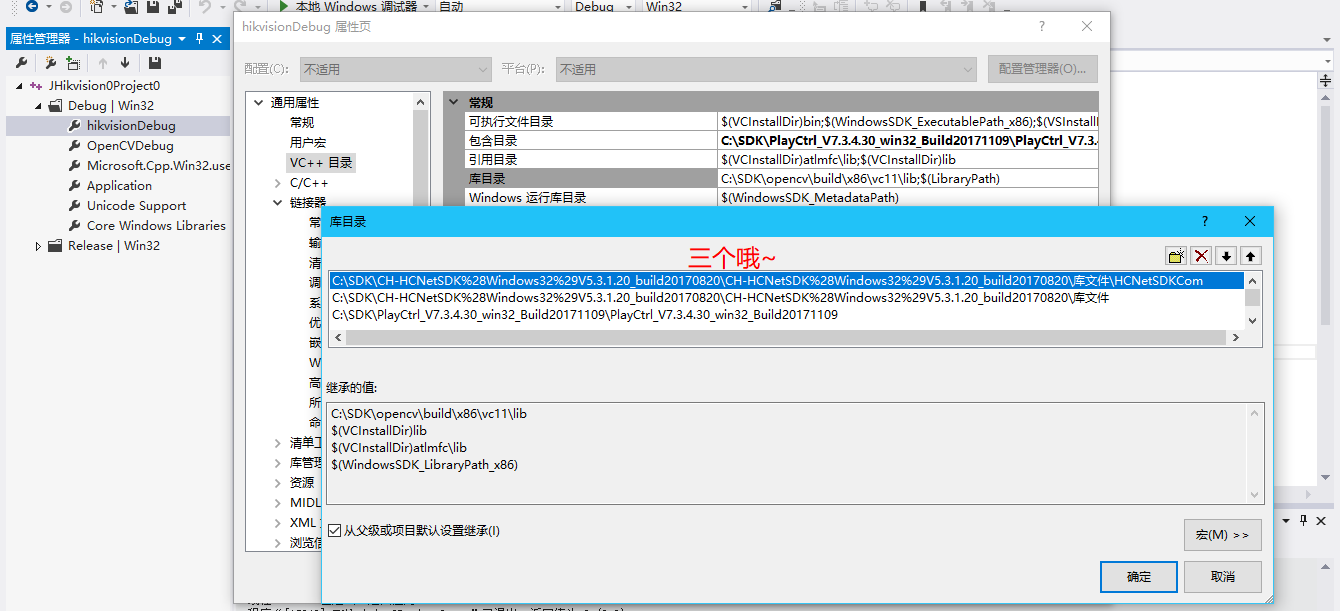
 在VC++目录下,在库目录里添加1个目录:C:\SDK\opencv\build\x86\vc11\lib
在VC++目录下,在库目录里添加1个目录:C:\SDK\opencv\build\x86\vc11\lib
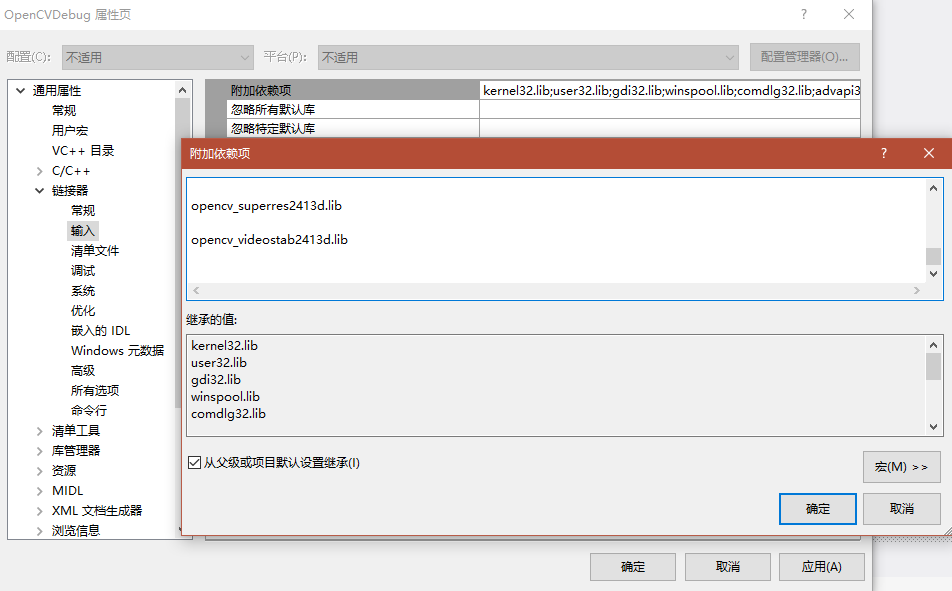
 选择通用属性->链接器->输入->附加依赖项,在附加依赖项里添加库文件:
选择通用属性->链接器->输入->附加依赖项,在附加依赖项里添加库文件:
opencv_ml2413d.lib
opencv_calib3d2413d.lib
opencv_contrib2413d.lib
opencv_core2413d.lib
opencv_features2d2413d.lib
opencv_flann2413d.lib
opencv_gpu2413d.lib
opencv_highgui2413d.lib
opencv_imgproc2413d.lib
opencv_legacy2413d.lib
opencv_objdetect2413d.lib
opencv_ts2413d.lib
opencv_video2413d.lib
opencv_nonfree2413d.lib
opencv_ocl2413d.lib
opencv_photo2413d.lib
opencv_stitching2413d.lib
opencv_superres2413d.lib
opencv_videostab2413d.lib
OpenCV项目测试程序:
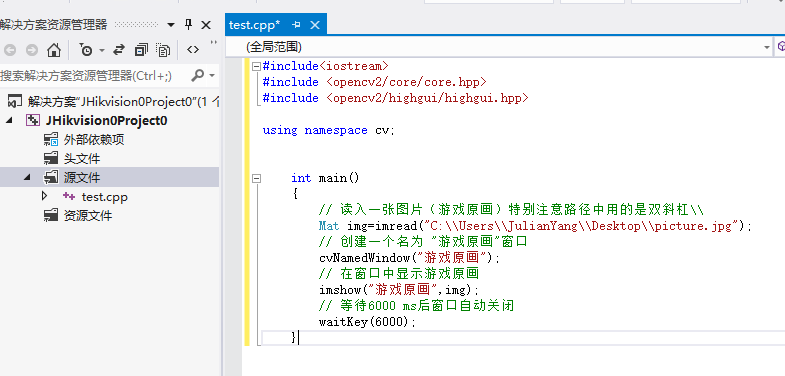
#include<iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
using namespace cv;
int main()
{
// 读入一张图片(游戏原画)特别注意路径中用的是双斜杠\\
Mat img=imread("C:\\Users\\JulianYang\\Desktop\\picture.jpg");
// 创建一个名为 "游戏原画"窗口
cvNamedWindow("游戏原画");
// 在窗口中显示游戏原画
imshow("游戏原画",img);
// 等待6000 ms后窗口自动关闭
waitKey(6000);
}2. 海康SDK的配置
添加新项目属性表,设置海康威视sdk的属性,添加头文件、库文件、附加依赖项:
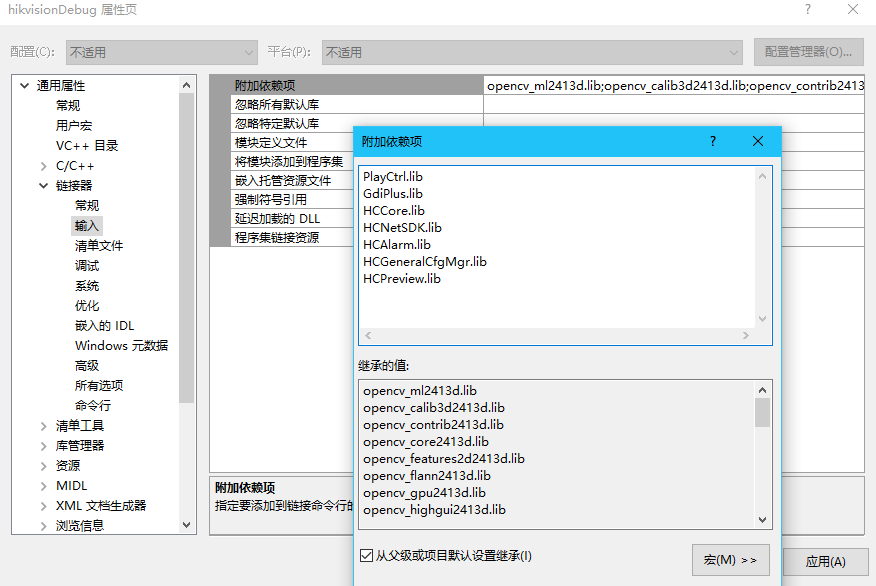
PlayCtrl.lib
GdiPlus.lib
HCCore.lib
HCNetSDK.lib
HCAlarm.lib
HCGeneralCfgMgr.lib
HCPreview.lib测试
#include <cstdio>
#include <cstring>
#include <iostream>
#include "Windows.h"
#include "HCNetSDK.h"
#include "PlayM4.h"
#include <opencv2\opencv.hpp>
#include "cv.h"
#include "highgui.h"
#include <time.h>
#define USECOLOR 1
using namespace std;
using namespace std;
//--------------------------------------------
int iPicNum=0;//Set channel NO.
LONG nPort=-1;
HWND hWnd=NULL;
void yv12toYUV(char *outYuv, char *inYv12, int width, int height,int widthStep)
{
int col,row;
unsigned int Y,U,V;
int tmp;
int idx;
//printf("widthStep=%d.\n",widthStep);
for (row=0; row<height; row++)
{
idx=row * widthStep;
int rowptr=row*width;
for (col=0; col<width; col++)
{
//int colhalf=col>>1;
tmp = (row/2)*(width/2)+(col/2);
// if((row==1)&&( col>=1400 &&col<=1600))
// {
// printf("col=%d,row=%d,width=%d,tmp=%d.\n",col,row,width,tmp);
// printf("row*width+col=%d,width*height+width*height/4+tmp=%d,width*height+tmp=%d.\n",row*width+col,width*height+width*height/4+tmp,width*height+tmp);
// }
Y=(unsigned int) inYv12[row*width+col];
U=(unsigned int) inYv12[width*height+width*height/4+tmp];
V=(unsigned int) inYv12[width*height+tmp];
// if ((col==200))
// {
// printf("col=%d,row=%d,width=%d,tmp=%d.\n",col,row,width,tmp);
// printf("width*height+width*height/4+tmp=%d.\n",width*height+width*height/4+tmp);
// return ;
// }
if((idx+col*3+2)> (1200 * widthStep))
{
//printf("row * widthStep=%d,idx+col*3+2=%d.\n",1200 * widthStep,idx+col*3+2);
}
outYuv[idx+col*3] = Y;
outYuv[idx+col*3+1] = U;
outYuv[idx+col*3+2] = V;
}
}
//printf("col=%d,row=%d.\n",col,row);
}
//解码回调 视频为YUV数据(YV12),音频为PCM数据
//void CALLBACK DecCBFun(long nPort,char * pBuf,long nSize,FRAME_INFO * pFrameInfo, void * nReserved1,void * nReserved2)
void CALLBACK DecCBFun(long nPort,char * pBuf,long nSize,FRAME_INFO * pFrameInfo, long nReserved1,long nReserved2)
{
long lFrameType = pFrameInfo->nType;
if(lFrameType ==T_YV12)
{
#if USECOLOR
//int start = clock();
IplImage* pImgYCrCb = cvCreateImage(cvSize(pFrameInfo->nWidth,pFrameInfo->nHeight), 8, 3);//得到图像的Y分量
yv12toYUV(pImgYCrCb->imageData, pBuf, pFrameInfo->nWidth,pFrameInfo->nHeight,pImgYCrCb->widthStep);//得到全部RGB图像
IplImage* pImg = cvCreateImage(cvSize(pFrameInfo->nWidth,pFrameInfo->nHeight), 8, 3);
cvCvtColor(pImgYCrCb,pImg,CV_YCrCb2RGB);
//int end = clock();
#else
IplImage* pImg = cvCreateImage(cvSize(pFrameInfo->nWidth,pFrameInfo->nHeight), 8, 1);
memcpy(pImg->imageData,pBuf,pFrameInfo->nWidth*pFrameInfo->nHeight);
#endif
//printf("%d\n",end-start);
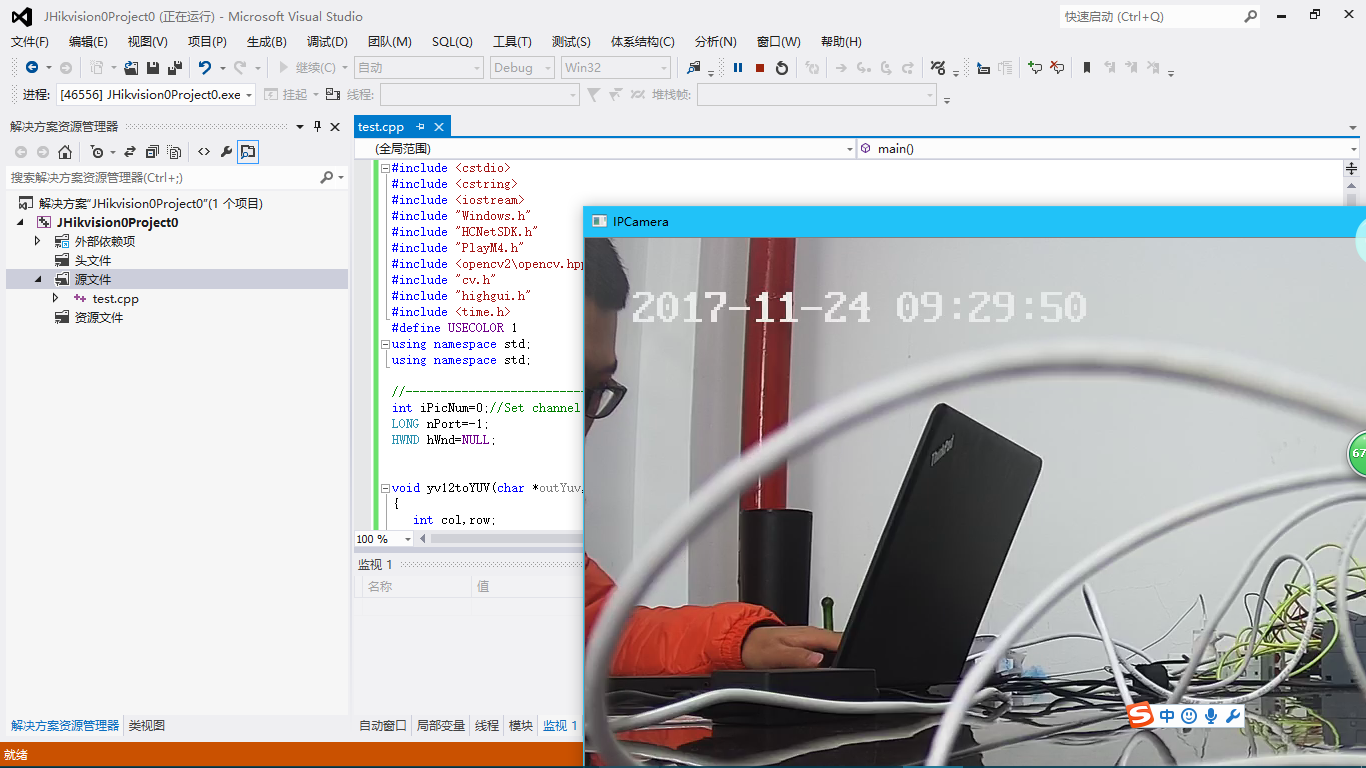
cvShowImage("IPCamera",pImg);
cvWaitKey(1);
#if USECOLOR
cvReleaseImage(&pImgYCrCb);
cvReleaseImage(&pImg);
#else
cvReleaseImage(&pImg);
#endif
//此时是YV12格式的视频数据,保存在pBuf中,可以fwrite(pBuf,nSize,1,Videofile);
//fwrite(pBuf,nSize,1,fp);
}
/***************
else if (lFrameType ==T_AUDIO16)
{
//此时是音频数据,数据保存在pBuf中,可以fwrite(pBuf,nSize,1,Audiofile);
}
else
{
}
*******************/
}
///实时流回调
void CALLBACK fRealDataCallBack(LONG lRealHandle,DWORD dwDataType,BYTE *pBuffer,DWORD dwBufSize,void *pUser)
{
DWORD dRet;
switch (dwDataType)
{
case NET_DVR_SYSHEAD: //系统头
if (!PlayM4_GetPort(&nPort)) //获取播放库未使用的通道号
{
break;
}
if(dwBufSize > 0)
{
if (!PlayM4_OpenStream(nPort,pBuffer,dwBufSize,1024*1024))
{
dRet=PlayM4_GetLastError(nPort);
break;
}
//设置解码回调函数 只解码不显示
if (!PlayM4_SetDecCallBack(nPort,DecCBFun))
{
dRet=PlayM4_GetLastError(nPort);
break;
}
//设置解码回调函数 解码且显示
//if (!PlayM4_SetDecCallBackEx(nPort,DecCBFun,NULL,NULL))
//{
// dRet=PlayM4_GetLastError(nPort);
// break;
//}
//打开视频解码
if (!PlayM4_Play(nPort,hWnd))
{
dRet=PlayM4_GetLastError(nPort);
break;
}
//打开音频解码, 需要码流是复合流
if (!PlayM4_PlaySound(nPort))
{
dRet=PlayM4_GetLastError(nPort);
break;
}
}
break;
case NET_DVR_STREAMDATA: //码流数据
if (dwBufSize > 0 && nPort != -1)
{
BOOL inData=PlayM4_InputData(nPort,pBuffer,dwBufSize);
while (!inData)
{
Sleep(10);
inData=PlayM4_InputData(nPort,pBuffer,dwBufSize);
OutputDebugString(L"PlayM4_InputData failed \n");
}
}
break;
}
}
void CALLBACK g_ExceptionCallBack(DWORD dwType, LONG lUserID, LONG lHandle, void *pUser)
{
char tempbuf[256] = {0};
switch(dwType)
{
case EXCEPTION_RECONNECT: //预览时重连
printf("----------reconnect--------%d\n", time(NULL));
break;
default:
break;
}
}
void main() {
//---------------------------------------
// 初始化
NET_DVR_Init();
//设置连接时间与重连时间
NET_DVR_SetConnectTime(2000, 1);
NET_DVR_SetReconnect(10000, true);
//---------------------------------------
// 获取控制台窗口句柄
//HMODULE hKernel32 = GetModuleHandle((LPCWSTR)"kernel32");
//GetConsoleWindow = (PROCGETCONSOLEWINDOW)GetProcAddress(hKernel32,"GetConsoleWindow");
//---------------------------------------
// 注册设备(这里要修改IP、账号、密码等等哦~)
LONG lUserID;
NET_DVR_DEVICEINFO_V30 struDeviceInfo;
lUserID = NET_DVR_Login_V30("192.168.1.64", 8000, "admin", "admin12345", &struDeviceInfo);
if (lUserID < 0)
{
printf("Login error, %d\n", NET_DVR_GetLastError());
NET_DVR_Cleanup();
return;
}
//---------------------------------------
//设置异常消息回调函数
NET_DVR_SetExceptionCallBack_V30(0, NULL,g_ExceptionCallBack, NULL);
//cvNamedWindow("IPCamera");
//---------------------------------------
//启动预览并设置回调数据流
NET_DVR_CLIENTINFO ClientInfo;
ClientInfo.lChannel = 1; //Channel number 设备通道号
ClientInfo.hPlayWnd = NULL; //窗口为空,设备SDK不解码只取流
ClientInfo.lLinkMode = 0; //Main Stream
ClientInfo.sMultiCastIP = NULL;
LONG lRealPlayHandle;
lRealPlayHandle = NET_DVR_RealPlay_V30(lUserID,&ClientInfo,fRealDataCallBack,NULL,TRUE);
if (lRealPlayHandle<0)
{
printf("NET_DVR_RealPlay_V30 failed! Error number: %d\n",NET_DVR_GetLastError());
return;
}
//cvWaitKey(0);
Sleep(-1);
//fclose(fp);
//---------------------------------------
//关闭预览
if(!NET_DVR_StopRealPlay(lRealPlayHandle))
{
printf("NET_DVR_StopRealPlay error! Error number: %d\n",NET_DVR_GetLastError());
return;
}
//注销用户
NET_DVR_Logout(lUserID);
NET_DVR_Cleanup();
return;
} 
参考
- OpenCV2.4.13+VS2012开发环境配置 - CSDN博客 http://blog.csdn.net/dcrmg/article/details/51809614
- OpenCV+海康威视摄像头的实时读取 - CSDN博客 http://blog.csdn.net/lonelyrains/article/details/50350052
- MFC(vs2013)+opencv+海康SDK_显示视频教程 - CSDN博客 http://blog.csdn.net/naibozhuan3744/article/details/78561745
✿✿ヽ(°▽°)ノ✿完结撒花!
FAQs
- 错误:“由于找不到HCNetSDK.dll,无法继续执行代码。重新安装程序可能会解决此问题。”
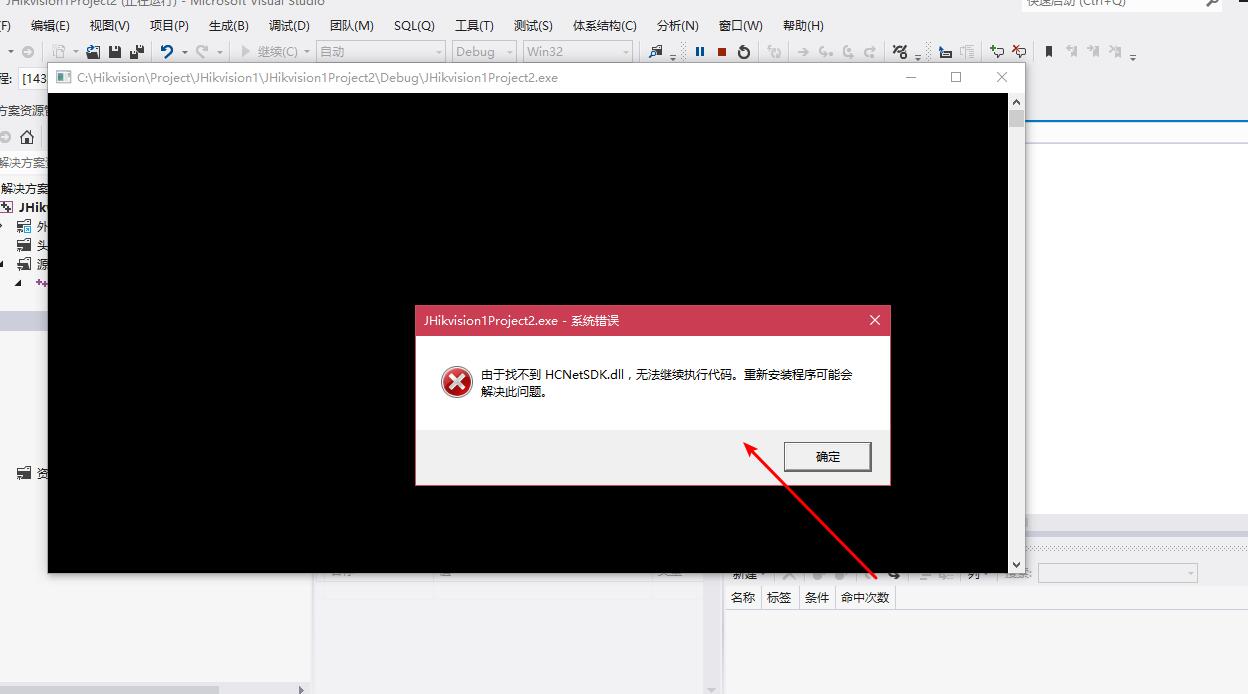
方案:将调用的dll文件全部复制到
(32位系统的话)C:\Windows\System32
(64位系统的话)C:\Windows\SysWOW64