(转载请注明出处)
2017---以后的SDK结构必然趋于稳定,也就会多一些新特性和新设备的支持,配置流程不再变化
2016.2:目前SDK版本是2016R1,配置过程一模一样,SDK主要变动是增加更多对SR300的API支持
# 环境配置:
买来摄像头第一件事肯定是跑个自带Demo看效果了,我们依次安装以下3个东西:
RealSenseSDK(R5);
注意:安装DCM时务必连接上摄像头,否则DCM告诉你找不到摄像头无法继续安装。
Windows10会在你连上摄像头时自动安装相应的DCM,你也可以手动安装并选择是否更新相机的固件。
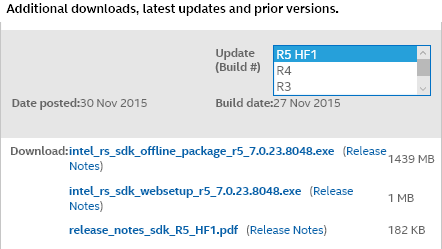
其它版本SDK可在Intel官网下载。这里需要你先注册一个账户,然后通过邮件给出的链接打开下载页面:
否则下载时需要输入SN:CPKR-XTH2P*VX。
(屏蔽一个字符,如果大家序列号都是这个的话我把它亮出来以后干脆直接复制序列号得了)。
安装好SDK之后重启或者注销一下来让系统环境变量生效。
之后就可以打开桌面上的文件夹快捷方式:
再打开SDK Samwser:

在Tools选项里面运行 Camera Explorer:
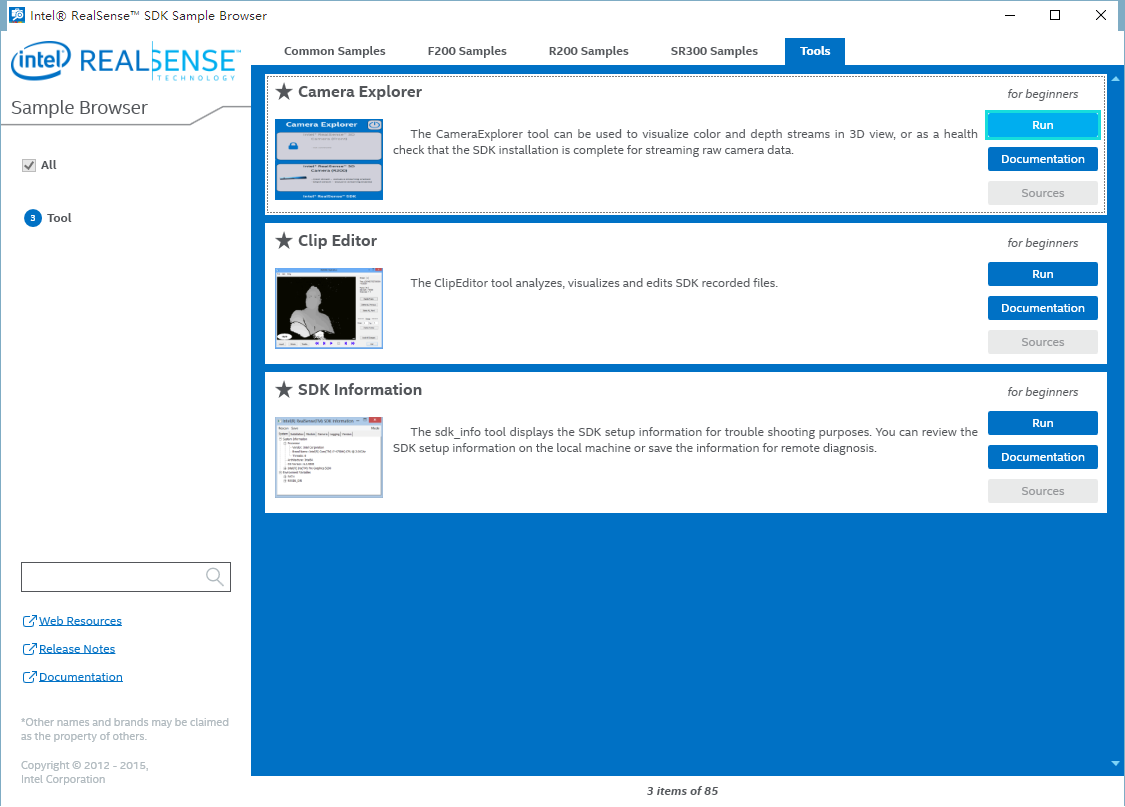
看看能否找到你的相机(我只连了R200):
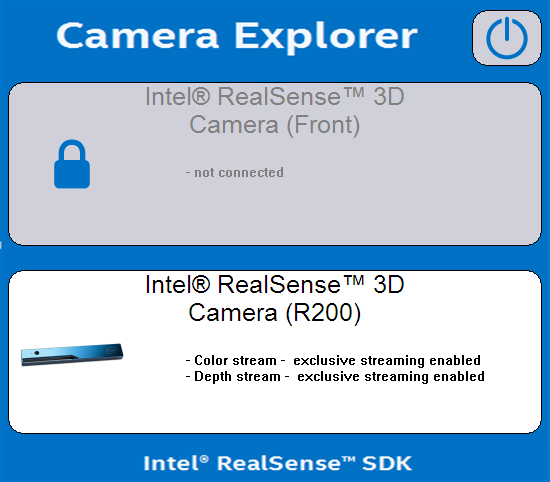
选择后可以看到深度和彩色图像说明驱动工作正常:
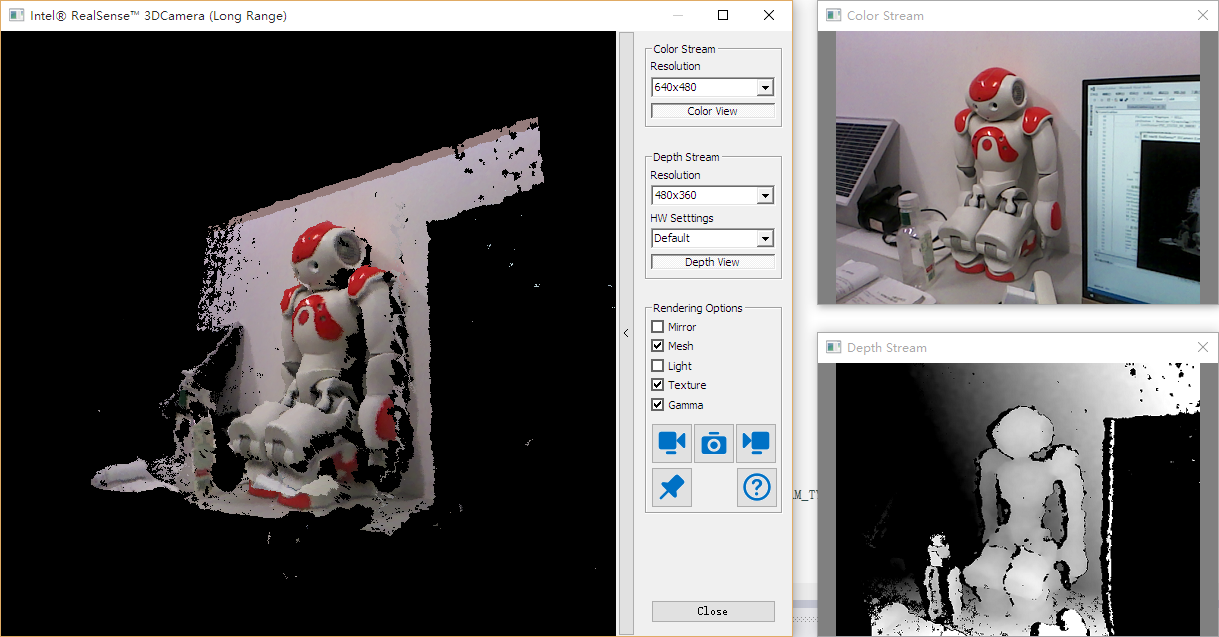
可以看出,R200精度上比Kinect一代要好一点。
彩色流分辨率是1920*1080,但是效果不理想,噪点多影像糊,毕竟不像KV2那样有空间放个大底CMOS,选个稍低一点分辨率的就好。
R200的用途是远距离测距,但是在Kinect二代面前无论是测量范围还是视频流的效果统统被虐成渣,唯一拿得出手的就是体积:
R200与F200:
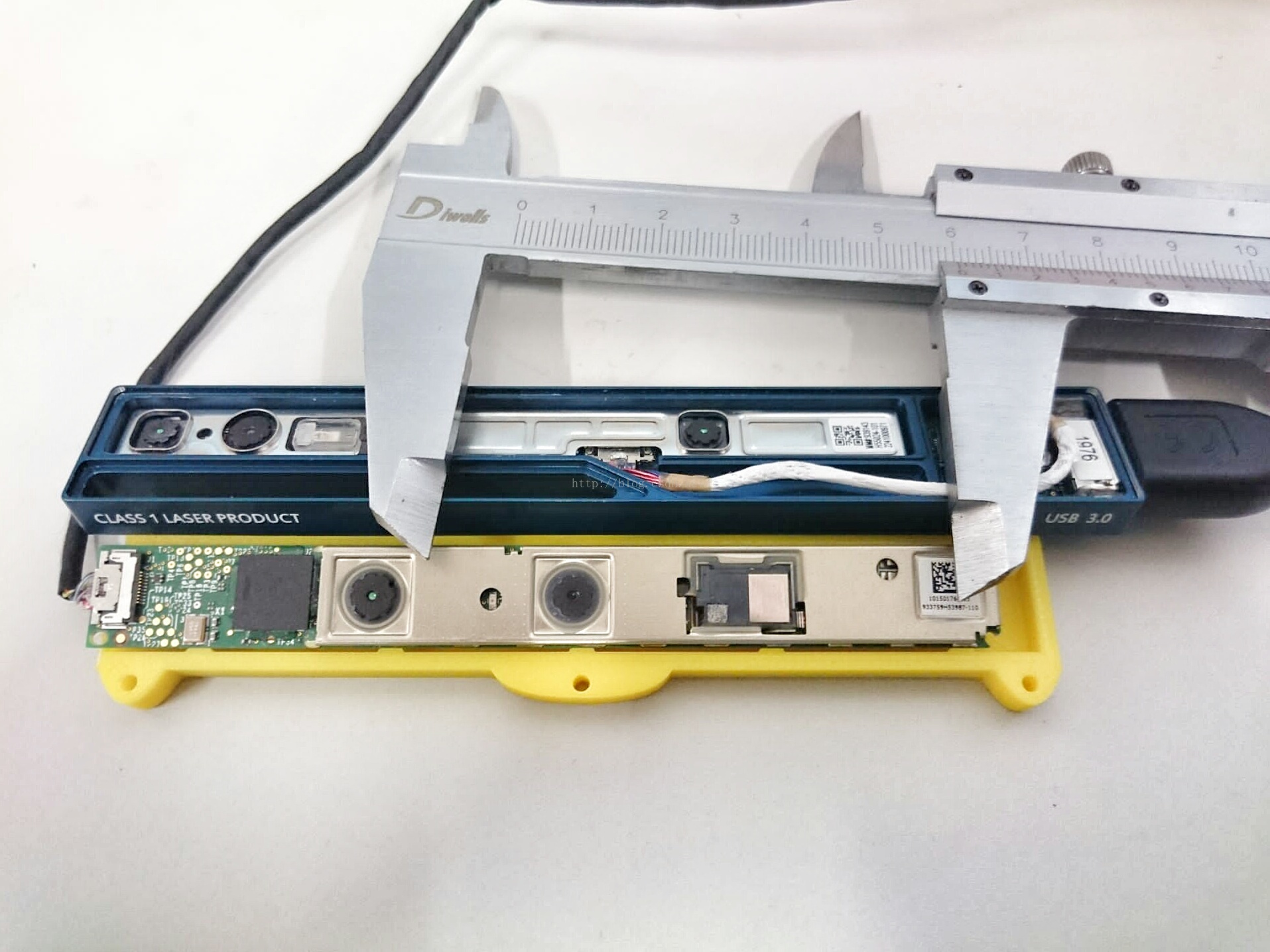
裸奔的KinectV2与R200:
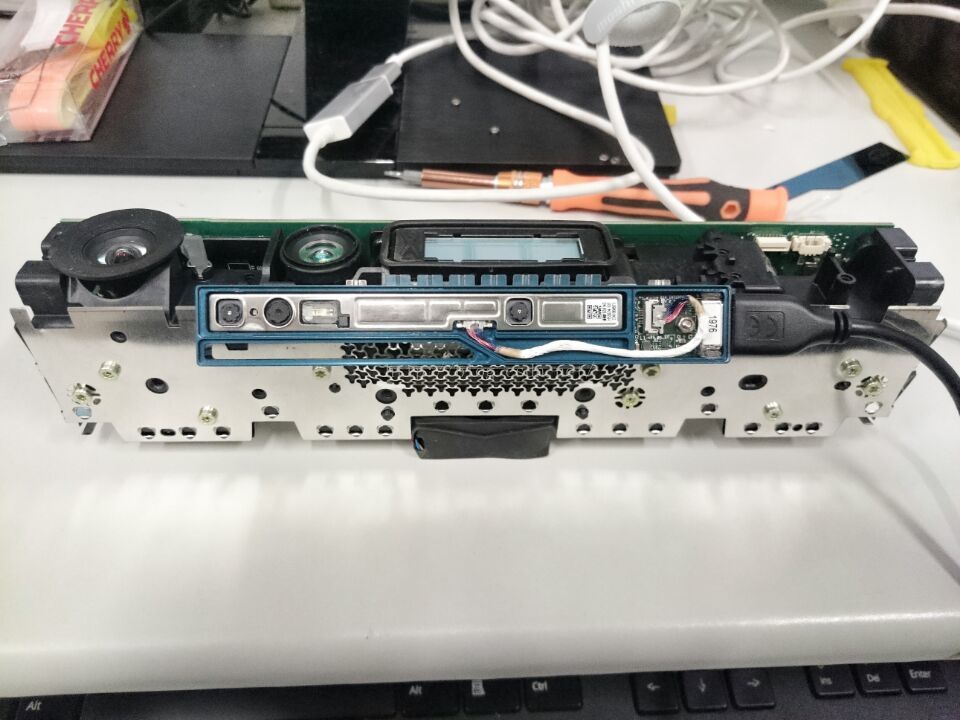
Kinect无论一代二代在体积上被完虐啊!值得注意的是,R200右边是USB3.0信号放大电路,内部模组比实际机头还要小不少。
# 配置工程:
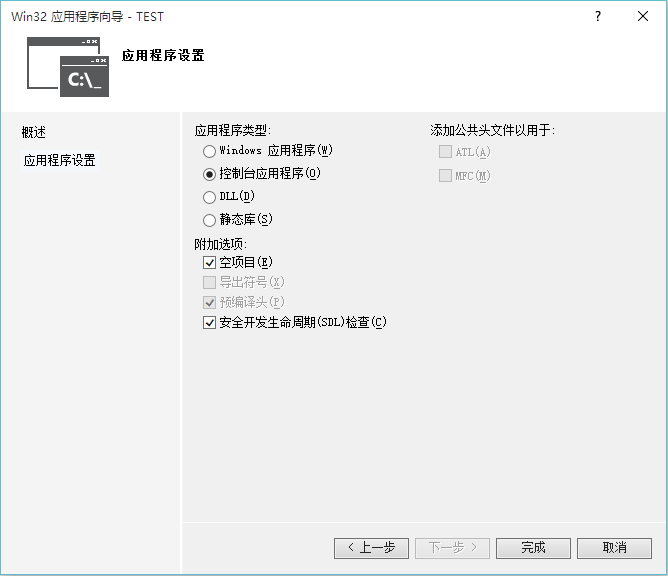
新建一个Win32控制台项目(C++):
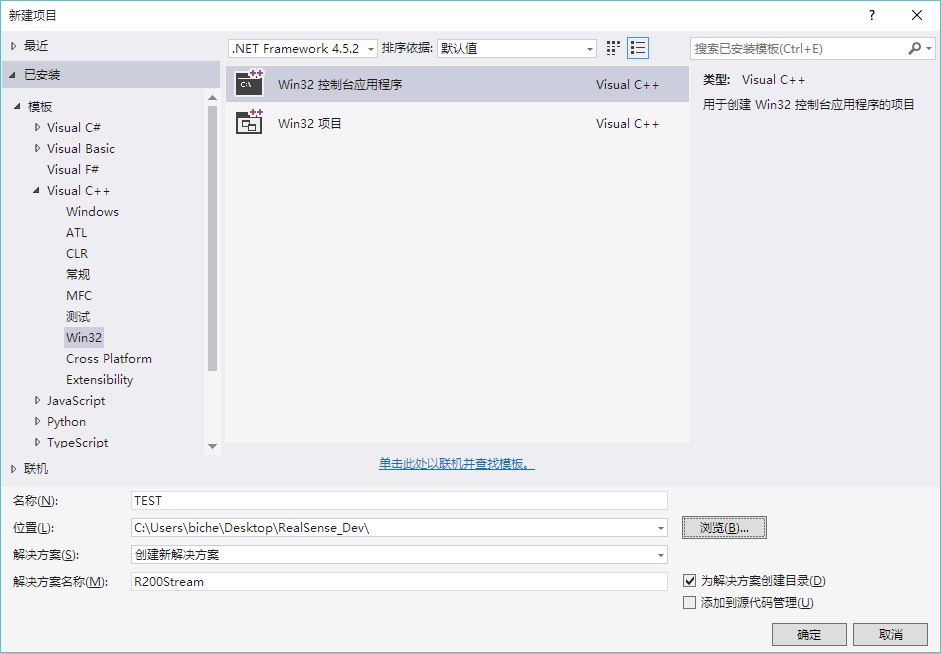
勾选空项目:
在C:\Program Files (x86)\Intel\RSSDK\props里找到两个属性表,嗯,Intel给你写好的属性表。(赞):
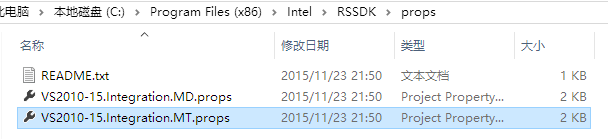
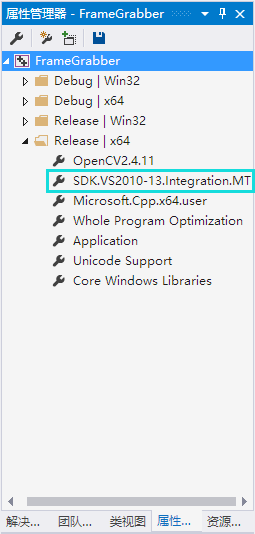
我选择的是VS2010-15.Integration.MT.props,在属性管理器中右键项目添加现有属性表:
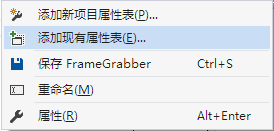
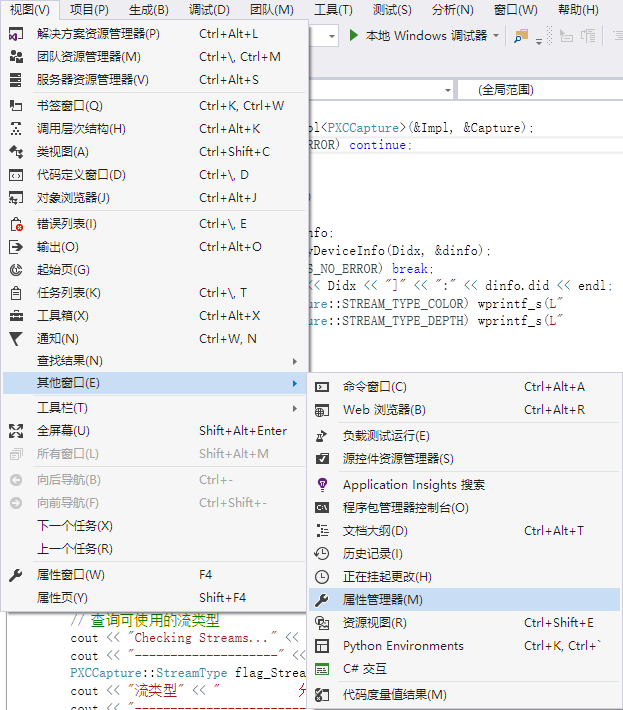
如果你没有找到属性管理器,则在视图->其他窗口->属性管理器打开即可:
添加完后大致是这个样子:
至此,我们就可以在这个工程里进行SDK的开发了。
头文件添加:
#include <windows.h>
#include "pxcsensemanager.h"PS:Intel把整个开发文档做成了chm格式,相当Classic的做法,大赞!
你可以在桌面上SDK文件夹->Documentation中找到对应的快捷方式。

吐槽一下M$,之前玩Kinect for Windows SDK v2.0 的时候API参考都是在msdn上找,函数还有好多保留的,搜索得慢就算了,最坑爹的是没像样的没目录。
但是从RealSense SDK 的API参考中我看到的不只是蛋疼...
在下节你将见识到Intel做这个chm的用心所在。

最后祝你,不要熬夜,再见。
