保持结构不变的图像降噪
假定图像的区域是同构或者异构的。我们可以逐个处理每个像素,通过检测它的邻域结构类型(异构/同构)来估计像素的真实密度,从而减少噪声。
设
为真实图像,
为被高斯噪声污染的后的观测图像,
为均值为 0 ,方差为
的高斯噪声分布
一个同构的邻域 假设是一个样本大小为 ,均值为 ,方差为 的高斯随机变量。
一个异构的邻域则被假设为样本大小为N,满足两个高斯混合分布的变量,分布的先验为
,均值为
,以及相同的方差
,
。混合分布的概率密度函数为:
最大似然率(maximum likelihood radio test)为
- 如果
邻域 是同构的,其中 是邻域样本 的方差:
参量C 由测试的显著性(sigificant level)决定 (例如,接受错误的同构的概率)。下表给出了C的值和对应的显著性。

如果邻域 是同构的,则像素p的真实值的估计值为邻域所有像素的均值,此时的估计为高斯噪声下的最小无偏估计(最优估计)。即
- 如果邻域异构,则混合分布的先验和均值由前3个采样时刻估计:
为
的 第j oder sample moments。
有了模型的估计参量,由贝叶斯方法可以得到两个混合分布的阈值
此时像素p的估计值为
当信噪比 大于2时,此算法能够有效的降噪同保持图像的结构。降噪的结果依赖于观测图像噪声方差 的估计,以及 N, N可以定义或者利用噪声方差来估计。N越大,细的特征如线和角特征容易丢失。N越小,平滑效果越不明显。
matlab代码实例如下,完整代码(github)
RGB=imread('saturn.png');
I=rgb2gray(RGB);
noise=sqrt(0.025)*randn(size(I)) + 0;
NI=im2double(I)+noise;
figure,imshow(NI);title('stained by gaussian noise Image');
[SI,SNR]=ImageReduNoise(NI,0.025,'NeigborHoodSize',[7,7],'SigLevel','SigLevel3');
title('smooth Image')
K=wiener2(NI,[7,7]);
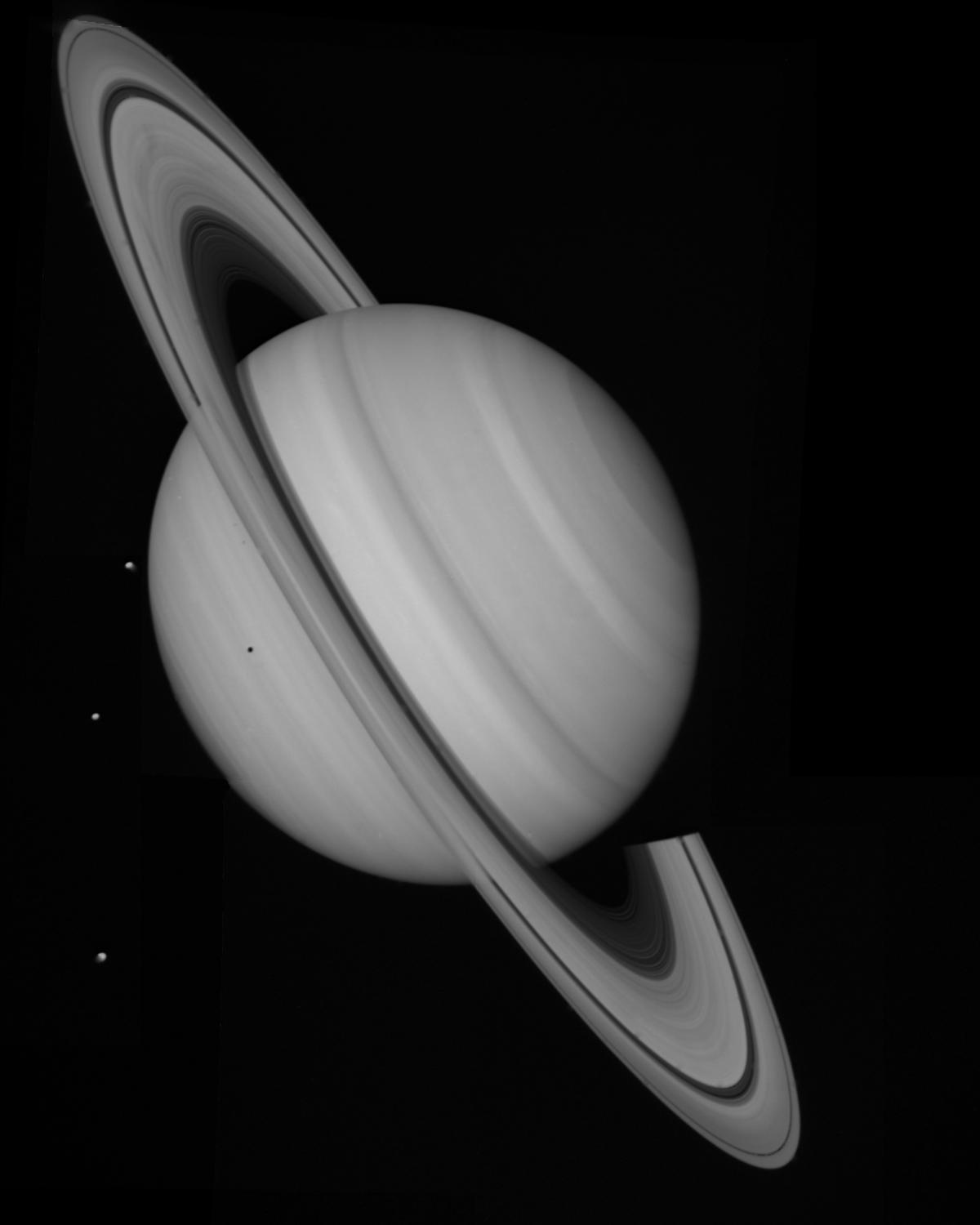
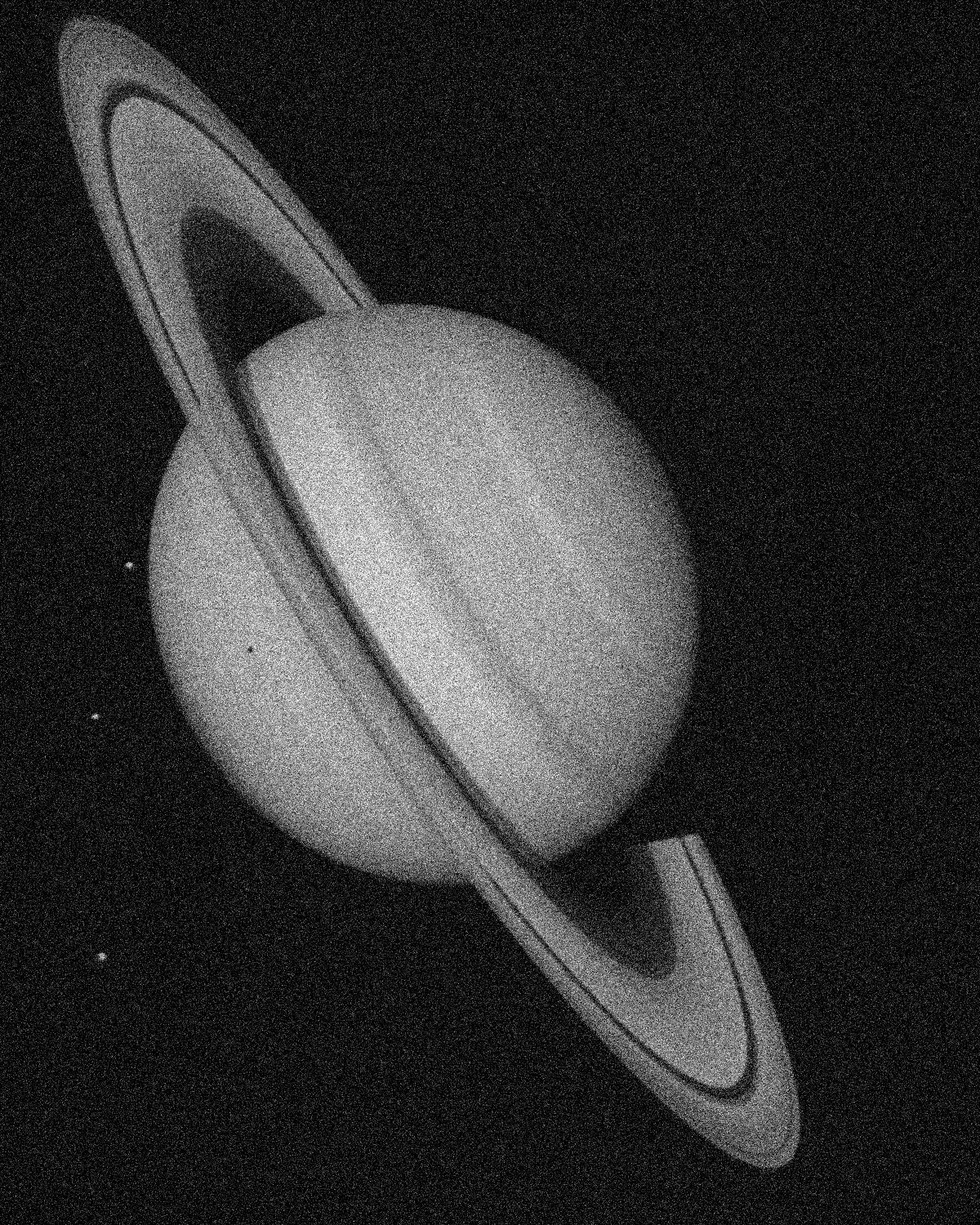
figure,imshow(K);title('wiener filter')原图以及对原图加上方差为0.025的高斯噪声后的图像如下图所示:
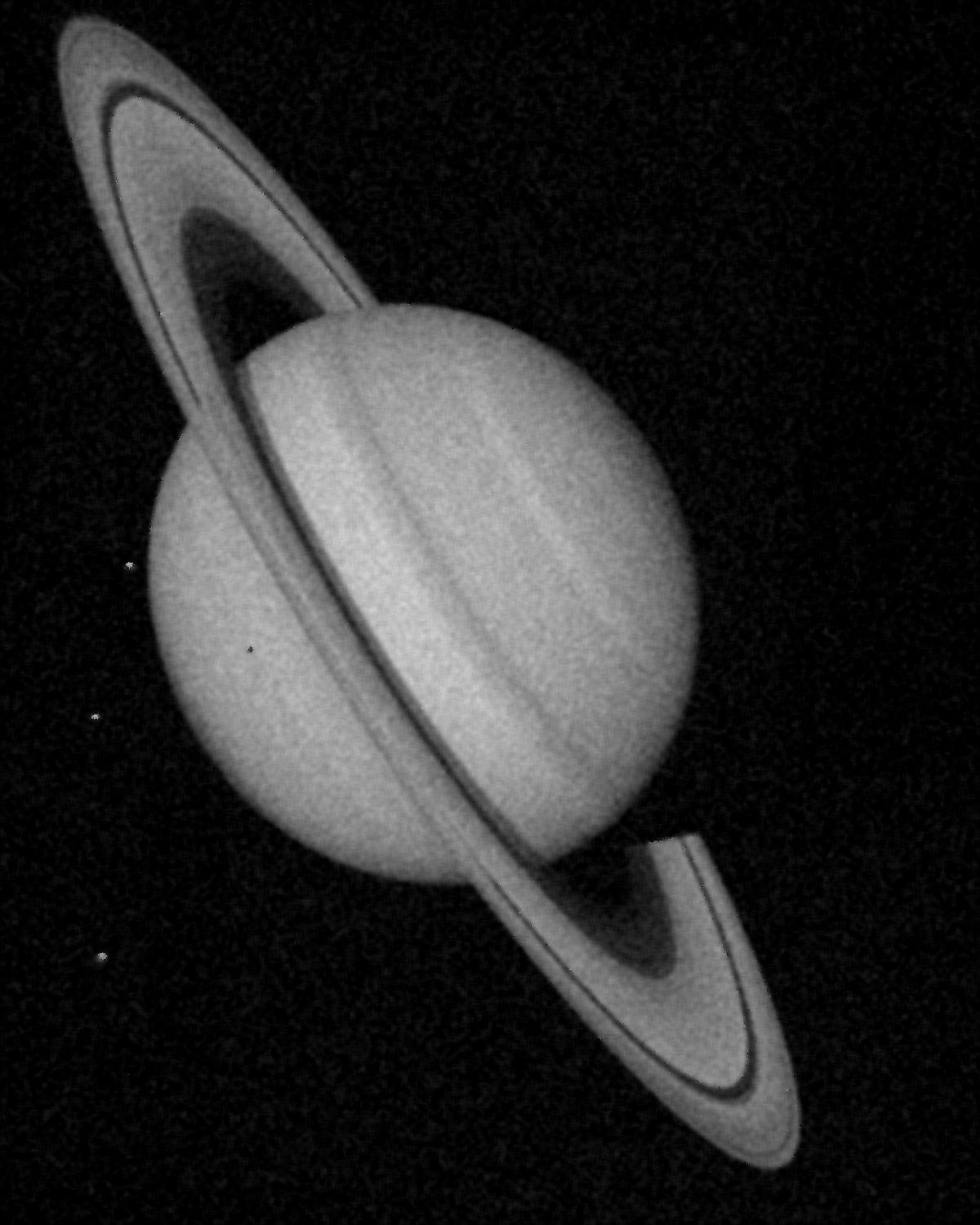
当N取7,显著性为0.001时,降噪的结果如下图所示:
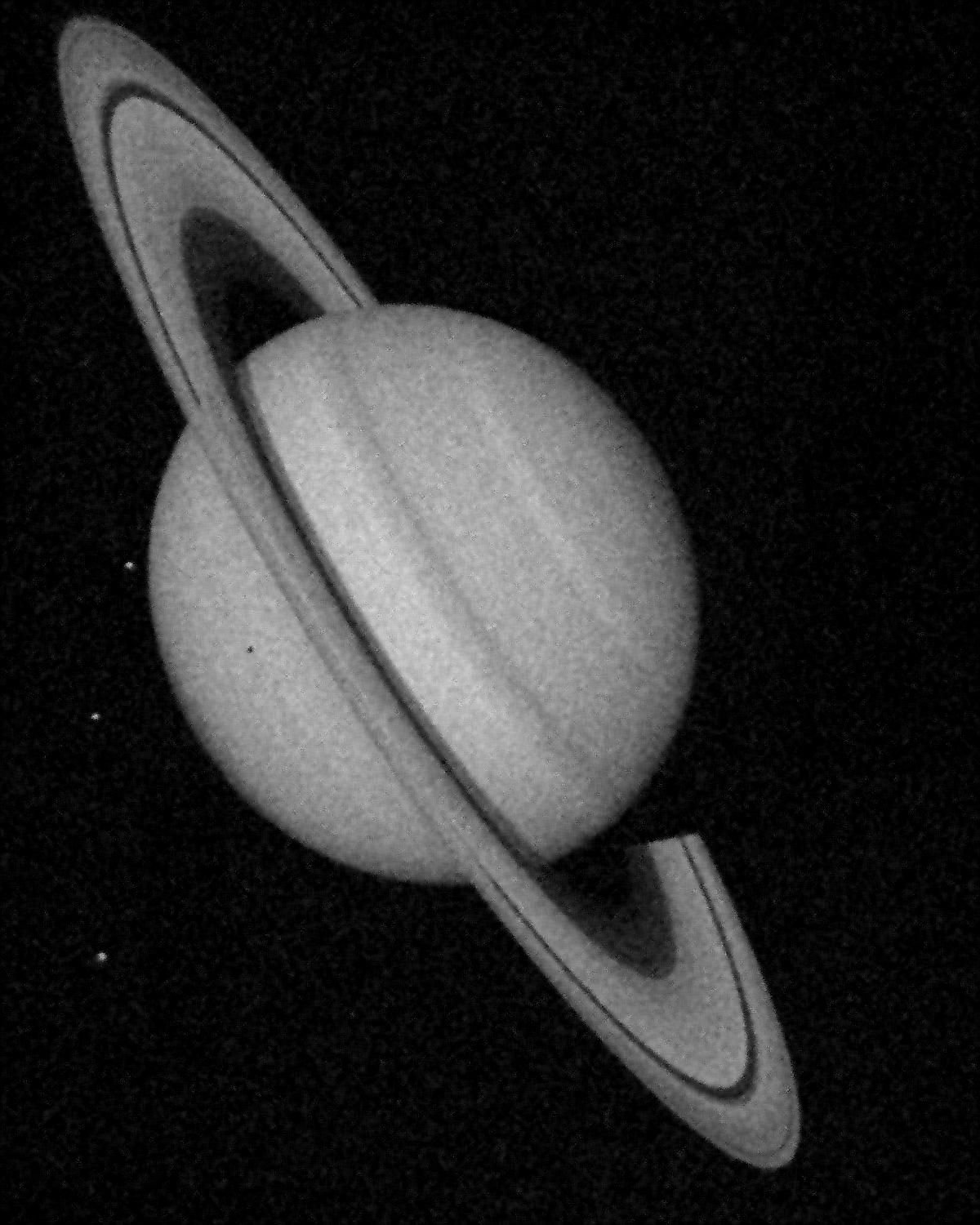
维纳自适应滤波器降噪结果如下图所示,可以看到效果要比维纳自适应滤波更好。
高斯噪声方差估计
此处讨论的是满足高斯分布的加性噪声
1. 利用均匀区域估计高斯噪声参数
选取图像中比较“平坦”的子带区域,此处被认为是均匀的,没有边缘存在,计算其方差和均值。将其直方图和估计出来的高斯分布形状比较。如果接近的,那么计算出的均值和方差就是高斯噪声的估计参数。
matlab代码实例如下,
I=imread('cameraman.tif');
% 加入高斯噪声方差为0.01,均值为0
bin=256;
noise=sqrt(0.01)*randn(size(I)) + 0;
% 图像转为double型和噪声叠加
NI=im2double(I)+noise;
figure,imshow(NI);
% 人工选择“平坦”区域
NIC=imcrop(NI);
% stastic mean and variance
[p,xvalue]=hist(double(NIC(:)),bin);
p=p./length(NIC(:));
u=sum(xvalue.*p);
var=sum(bsxfun(@minus,xvalue,u).^2.*p);
% 比较直方图和高斯分布
pdf=gaussmf(xvalue,[sqrt(var),u]).*((2*pi*var)^(-1/2));
figure,bar(pdf);
title('高斯分布');
figure,bar(p);title('直方图分布');形状如图所示,两者很接近,此时高斯分布的方差估计值是0.0099和噪声实际方差0.01的误差为0.0001。均值估计值是0.0515,误差为0.0515。


基于滤波
我们知道边缘和噪声的二阶微分值都较大,但是不同的是噪声对laplacian算子比较敏感。因而可以用两个不同laplacian滤波器,对噪声图像滤波之后做差。由于边缘部分的滤波结果差不多,抵消了,剩下的就是噪声部分。两个Laplacian滤波器滤波后做差效果如下图所示:
具体算法:噪声图像imageI大小为[W,H]。两个Laplacian滤波器,L1和L2,估计噪声方差为$\sigma_n$


注意此方法只能估计均值为0的高斯分布噪声的方差。
matlab代码实例如下:
I=imread('cameraman.tif');
% 加入高斯噪声方差为0.01,均值为0
noise=sqrt(0.01)*randn(size(I)) + 0;
% 图像转为double型和噪声叠加
NI=im2double(I)+noise;
figure,subplot(121),imshow(I);title('原图');
subplot(122),imshow(NI);title('加噪声')
h1=fspecial('laplacian',0);%滤波器L1
h2=fspecial('laplacian',1);%滤波器L2
N=(h2-h1)*2;
imI=imfilter(NI,N);
%估计噪声方差
varn=sum(abs(imI(:)))./(size(imI,1)-2)./(size(imI,2)-2)./6.*sqrt(pi/2);
varn=varn.^2;最后估计的varn值为0.0108,误差为0.0008
参考文献
[1]. Haris K, Efstratiadis S N, Maglaveras N, et al. Hybrid image segmentation using watersheds and fast region merging.[J]. IEEE Transactions on Image Processing A Publication of the IEEE Signal Processing Society, 1998, 7(12):1684-1699.
[2]. Immerkaer J. Fast noise variance estimation[J]. Computer vision and image understanding, 1996, 64(2): 300-302.
[3]冈萨雷斯. 数 字 图 像 处 理 (第 二 版)[J]. 电 子 工 业 出 版 社, 2007.
[4]Haris K, Tziritas G, Orphanoudakis S. Smoothing 2-D or 3-D images using local classification[C]//Proc. EUSIPCO. 1994