APM飞控(运行在Pixhawk硬件之上)添加一个新的硬件驱动其实很容易,如果你想添加一个新的串口外设,比如超声波、毫米波雷达、激光测距仪、避障模块等等,可以参考飞控中原有的类似驱动新建一个驱动程序,然后稍作修改就行了,下面以一个RTK GPS(司南导航K系列)为例,介绍一下如何添加一个新的驱动。
思路:APM代码中,已经有多个不同厂家的GPS驱动,我们要添加的GPS(含RTK)的驱动与其中的某些驱动有很大的相似之处,因此可以复制该驱动,在其基础上修改,从而减少了很多工作量。
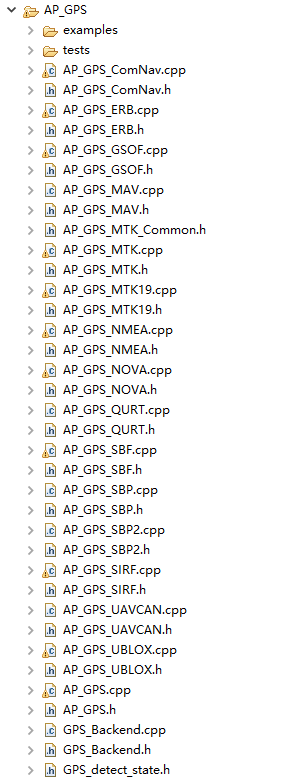
APM代码中GPS驱动在ardupilot/libraries/AP_GPS中,其中AP_GPS.cpp为前台顶层文件,用来与更顶层的飞控代码交互,提供解析后的GPS信息。GPS_Backend.cpp提供不同厂家、不同协议GPS的统一接口,不同厂家的驱动为AP_GPS_XXX.cpp(如ublox的为AP_GPS_UBLOX.cpp),AP_GPS_XXX.cpp都是从GPS_Backend基类派生出来的(不得不说,在这一点,C++还是比C语言有挺大的优势)。
一、新建驱动文件
我们打算用NMEA协议,因此与之最接近的是“AP_GPS_NMEA.cpp”,将“AP_GPS_NMEA.cpp、AP_GPS_NMEA.h”复制并粘贴在AP_GPS文件夹,将其重命名为AP_GPS_ComNav.cpp和AP_GPS_ComNav.h,打开Eclipse,将工程刷新一下,新添加的文件将自动被添加到工程中,不需要任何设置,非常方便。
二、修改驱动文件
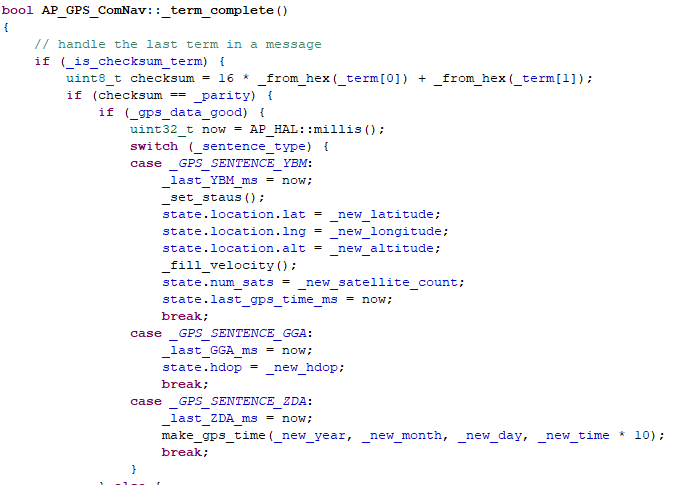
打开AP_GPS_ComNav.cpp和AP_GPS_ComNav.h文件,将其中的AP_GPS_NMEA替换为AP_GPS_ComNav,然后根据自己的需要,添加自定义的协议的解析。比如使用的是司南导航的K726双天线板卡,想提取航向信息,就需要添加GPYBM帧的解析功能。
三、添加顶层驱动的调用
1、AP_GPS.h第86行,添加一种新的GPS类型,GPS_TYPE_COMNAV = 16;
2、AP_GPS.cpp第37行,添加“#include “AP_GPS_ComNav.h””;
3、AP_GPS.cpp第67行、75行,添加注释“16:COMNAV”;
4、AP_GPS.cpp第413行添加如下代码:
if(_type[instance] == GPS_TYPE_COMNAV)
{
dstate->detect_started_ms = 0; // specified, not detected
new_gps = new AP_GPS_ComNav(*this, state[instance], _port[instance]);
goto found_gps;
}怒而飞,其翼若垂天之云!我是怒飞。
如有其它疑问,请QQ联系:3500985284