今天单位进了一个20m 的sick 激光雷达,在安装过程中出现了一点点小问题,主要是直接 apt-get 的文件太简单,需要自己配置一下,才能在ROS 上跑, 本文附有全部代码及配置。
1. SICK LMS111 设置
首先需要对雷达进行基本的设置,用网线将雷达连接至电脑的网口,
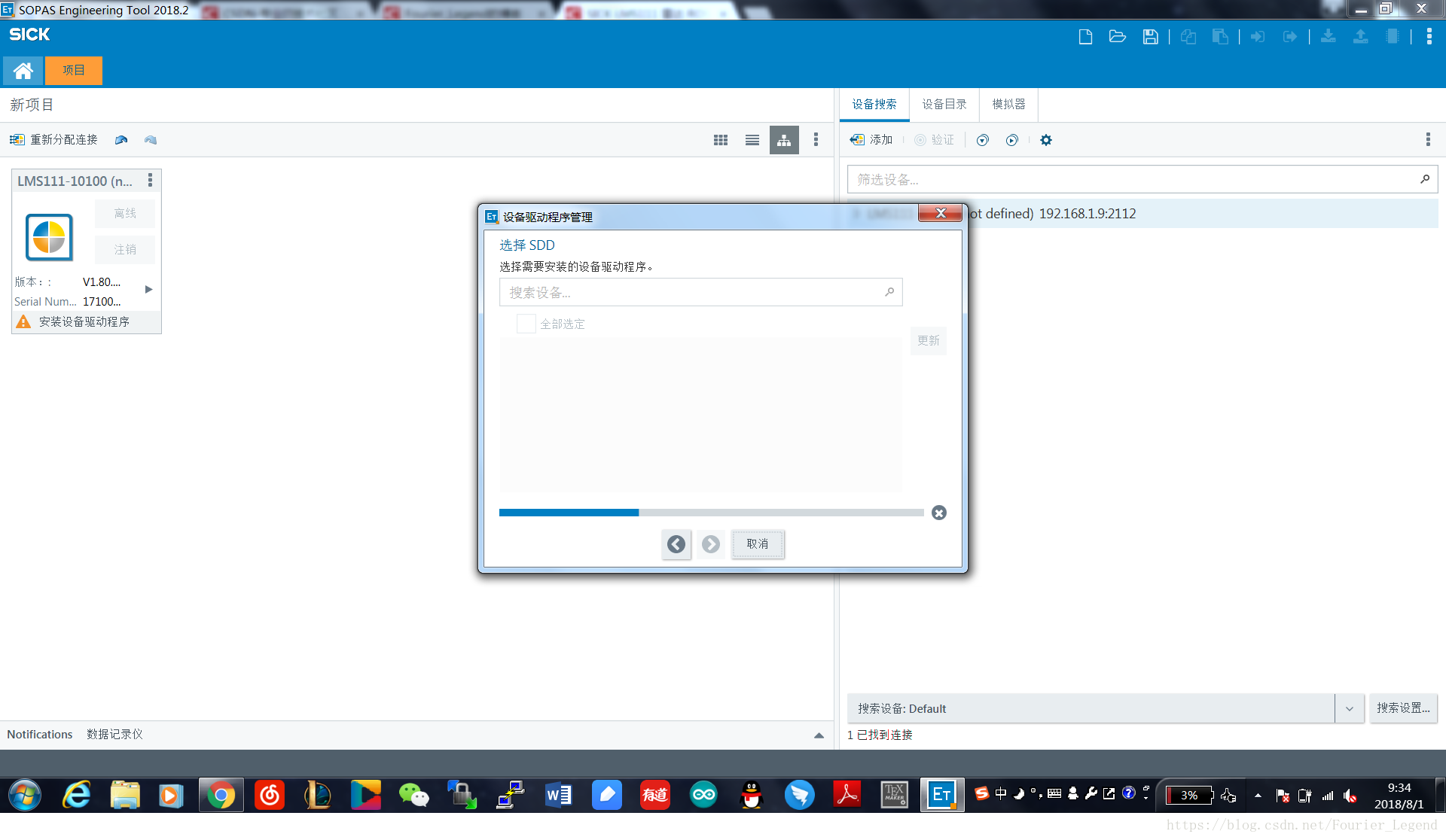
先点击搜索设备,如果连接正常,能自动搜索到设备,设备会出现在左边的对话栏,点机会提示你安装驱动,根据提示安装即可。我全选了安装文件,但是需要很长的时间。后来只选择了相关的, 搜索LMS即可,IP设置如下。
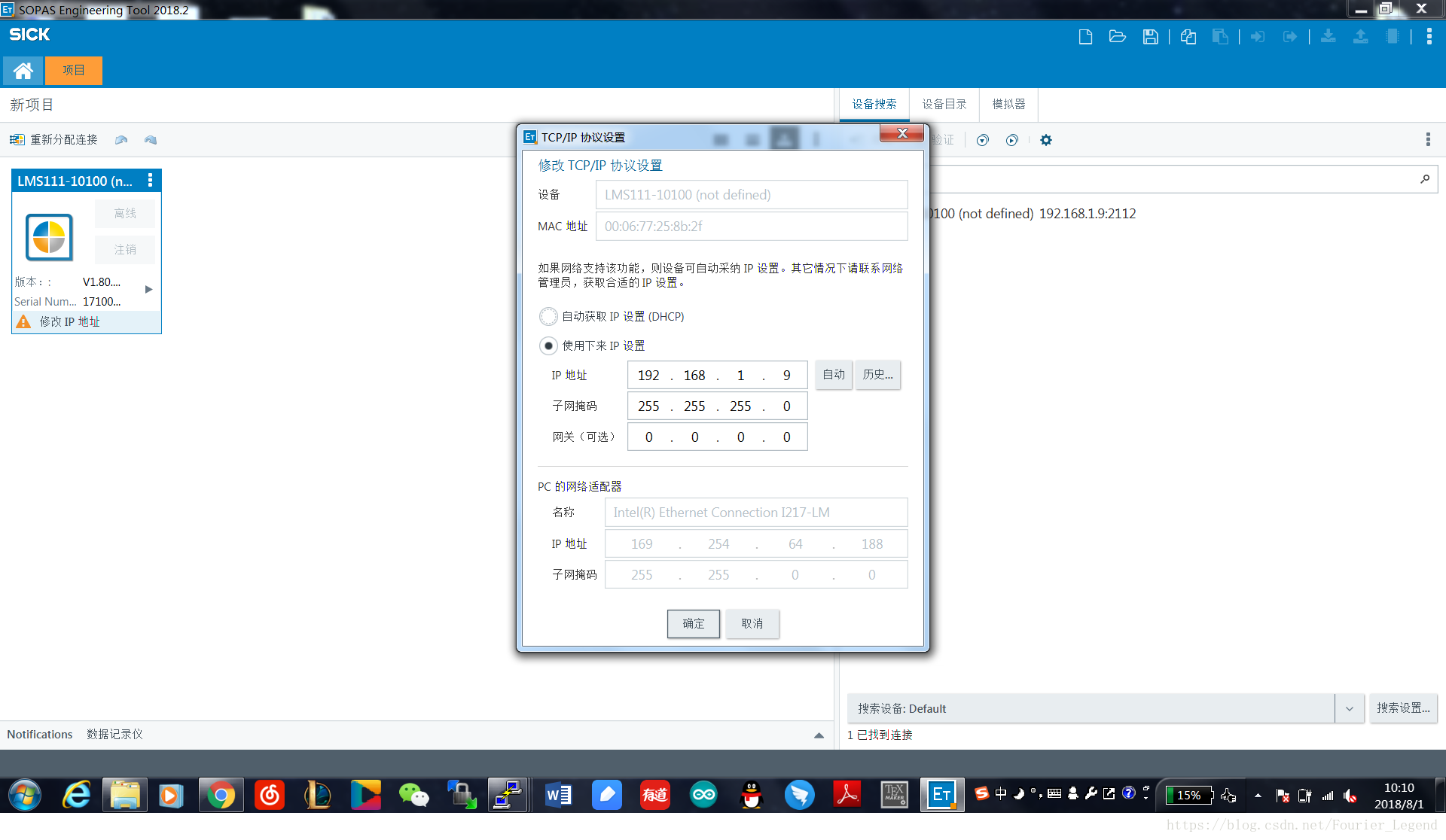
主要是设置一下雷达的 IP
参考: https://www.cnblogs.com/21207-iHome/p/8022512.html
2.Ubuntu14.04 下 ROS 使用雷达建图
安装雷达驱动
sudo apt-get install ros-indigo-lms1xx设置网口IP
右上角的网络-> Edit Connection-> add 注意次ip不能和雷达ip相同
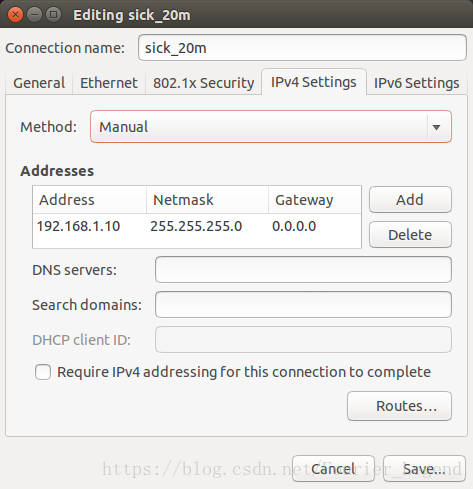
检查是否能和雷达连接成功, 后跟设置的雷达
ping 192.168.1.9如果连接成功说明,电脑已经能和雷达通信
修改激光雷达launch文件
roscd lms1xx
sudo vi launch/LMS1xx.launch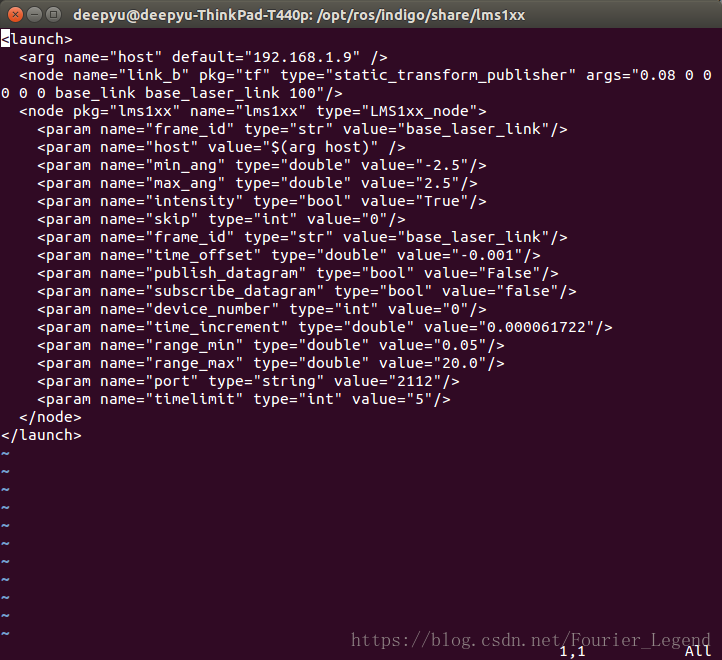
其中第一行为 雷达的ip, 说白了就是通过网口两者的通信
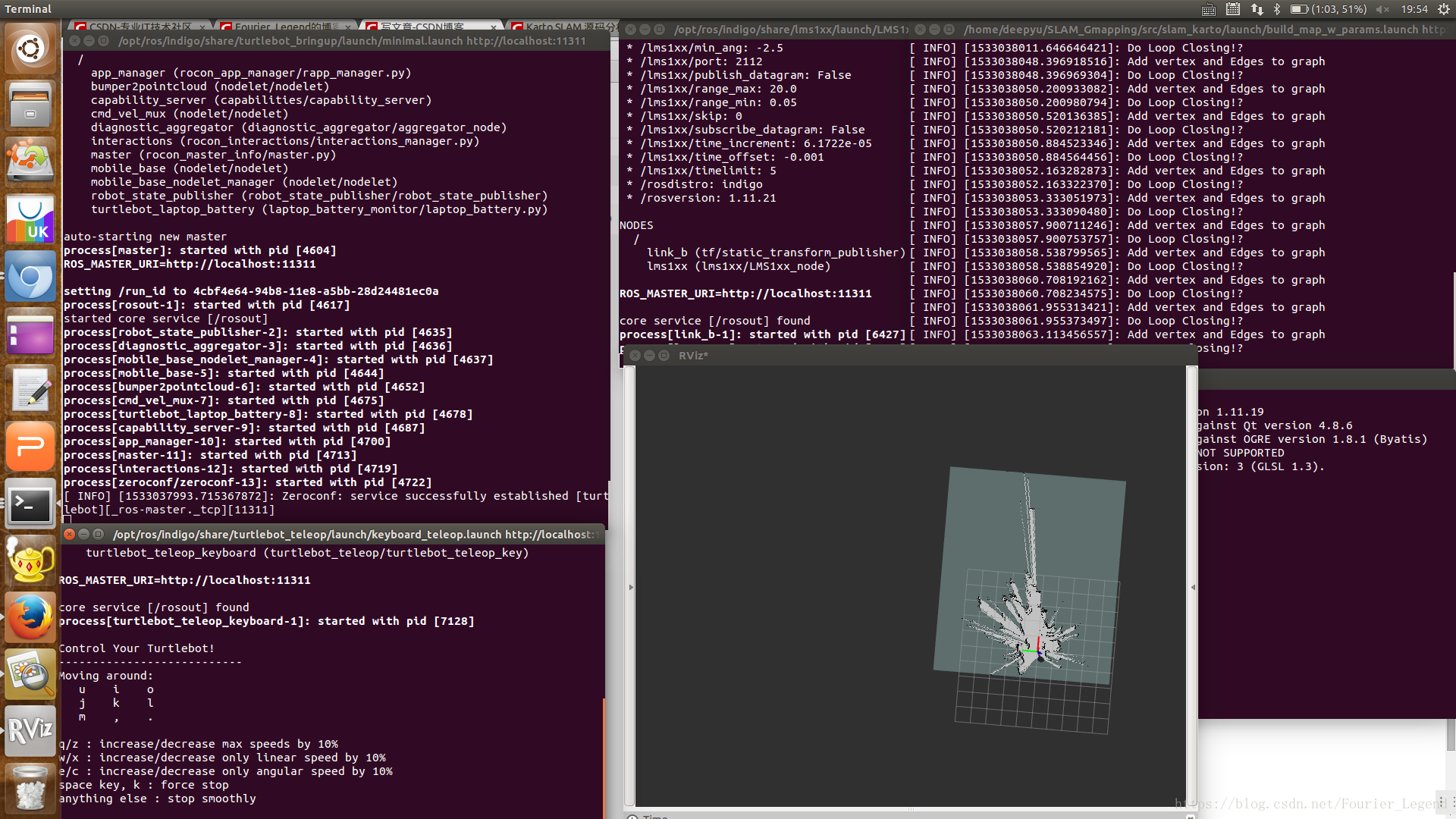
3. Slam_Karto 使用LMS111建图
接下来就可以使用此雷达建图,自己尝试的是 slam_karto 算法
在打开终端,运行 turtlebot
roslaunch turtlebot_bringup minimal.launch打开一个终端,运行slam_karto 算法
sudo roslaunch slam_karto build_~map_w_params.launch打开新的终端运行雷达
roslaunch lms1xx LMS1xx.launch在打开终端,运行rviz
rosrun rviz rviz恭喜,大功告成,已经能够工作了