利用种子填充法对二值图像进行连通域标记
最近一直在用OpenCV做设计,其中有一个设计环节是设计检测二值图像的连通域及其特征,在网上搜了一下算法,看到了有two-pass法和种子填充法两种。两种经典的方法都编程实现过,个人觉得,种子填充法比较直观,不需要像two-pass法那么绕,只需要遍历一遍图像,而且还能顺带计算面积和外接矩形框,
种子填充法原理
关于种子填充法的详细原理可以参考OpenCV_连通区域分析(Connected Component Analysis/Labeling)
- 大致算法如下:
- 设二值化图像A中,像素值为255的点是前景,为0的点是背景。A(x, y)为坐标(x, y)处的像素值,定义连通区域的label是一个1~254的整数,互不联通的区域有不同的label。初始化label=0。遍历图像的每个像素:
- 1、 如果像素值不等于255,则继续访问下一个元素。
- 2、 如果像素值为A(x, y) = 255,则label++,当前值A(x, y) = label,并且
- a. 检查其4个邻域,如果有属于前景的像素也给它赋予label值,并将它的坐标压栈。
-
b. 弹出栈顶坐标,重复a的过程,知道堆栈为空。
此时,便找到了一个连通区域,该区域内的像素值被标记为label。
3、 重复1、2的过程,检测出所有的区域。

废话少说,上代码!
实现程序
该程序基于OpenCV2.4.9 和VS2010平台:
#include <opencv2\opencv.hpp>
#include <iostream>
#include <vector>
#include <stack>
using namespace std;
using namespace cv;
typedef struct _Feather
{
int label; // 连通域的label值
int area; // 连通域的面积
Rect boundingbox; // 连通域的外接矩形框
} Feather;
/*
Input:
src: 待检测连通域的二值化图像
Output:
dst: 标记后的图像
featherList: 连通域特征的清单
return:
连通域数量。
*/
int bwLabel(Mat & src, Mat & dst, vector<Feather> & featherList)
{
int rows = src.rows;
int cols = src.cols;
int labelValue = 0;
Point seed, neighbor;
stack<Point> pointStack; // 堆栈
int area = 0; // 用于计算连通域的面积
int leftBoundary = 0; // 连通域的左边界,即外接最小矩形的左边框,横坐标值,依此类推
int rightBoundary = 0;
int topBoundary = 0;
int bottomBoundary = 0;
Rect box; // 外接矩形框
Feather feather;
featherList.clear(); // 清除数组
dst.release();
dst = src.clone();
for( int i = 0; i < rows; i++)
{
uchar *pRow = dst.ptr<uchar>(i);
for( int j = 0; j < cols; j++)
{
if(pRow[j] == 255)
{
area = 0;
labelValue++; // labelValue最大为254,最小为1.
seed = Point(j, i); // Point(横坐标,纵坐标)
dst.at<uchar>(seed) = labelValue;
pointStack.push(seed);
area++;
leftBoundary = seed.x;
rightBoundary = seed.x;
topBoundary = seed.y;
bottomBoundary = seed.y;
while(!pointStack.empty())
{
neighbor = Point(seed.x+1, seed.y);
if((seed.x != (cols-1)) && (dst.at<uchar>(neighbor) == 255))
{
dst.at<uchar>(neighbor) = labelValue;
pointStack.push(neighbor);
area++;
if(rightBoundary < neighbor.x)
rightBoundary = neighbor.x;
}
neighbor = Point(seed.x, seed.y+1);
if((seed.y != (rows-1)) && (dst.at<uchar>(neighbor) == 255))
{
dst.at<uchar>(neighbor) = labelValue;
pointStack.push(neighbor);
area++;
if(bottomBoundary < neighbor.y)
bottomBoundary = neighbor.y;
}
neighbor = Point(seed.x-1, seed.y);
if((seed.x != 0) && (dst.at<uchar>(neighbor) == 255))
{
dst.at<uchar>(neighbor) = labelValue;
pointStack.push(neighbor);
area++;
if(leftBoundary > neighbor.x)
leftBoundary = neighbor.x;
}
neighbor = Point(seed.x, seed.y-1);
if((seed.y != 0) && (dst.at<uchar>(neighbor) == 255))
{
dst.at<uchar>(neighbor) = labelValue;
pointStack.push(neighbor);
area++;
if(topBoundary > neighbor.y)
topBoundary = neighbor.y;
}
seed = pointStack.top();
pointStack.pop();
}
box = Rect(leftBoundary, topBoundary, rightBoundary-leftBoundary, bottomBoundary-topBoundary);
rectangle(src, box, 255);
feather.area = area;
feather.boundingbox = box;
feather.label = labelValue;
featherList.push_back(feather);
}
}
}
return labelValue;
}
int main(int argc, char *argv[])
{
Mat src(imread("shape.jpg", 0));
if(src.empty())
exit(-1);
threshold(src, src, 127, 255, THRESH_BINARY); // 二值化图像
vector<Feather> featherList; // 存放连通域特征
Mat dst;
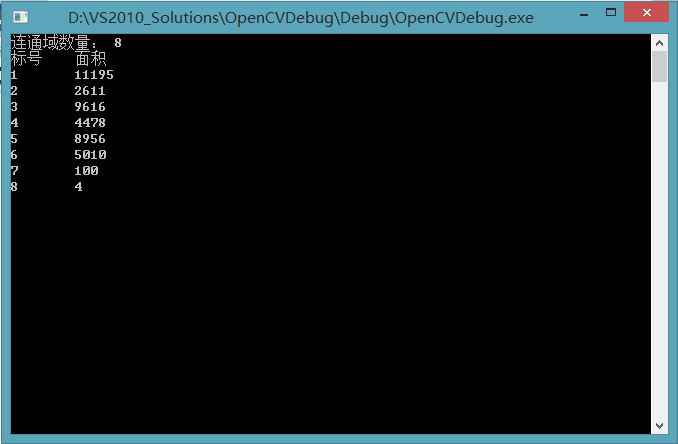
cout << "连通域数量: " << bwLabel(src, dst, featherList) << endl;
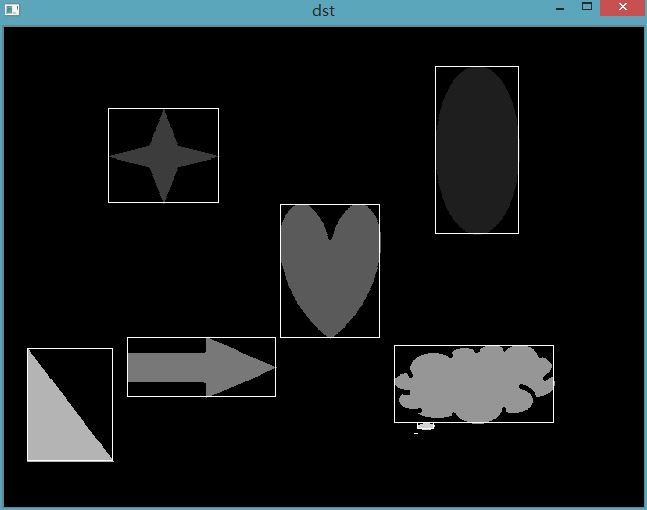
// 为了方便观察,可以将label“放大”
for( int i = 0; i < dst.rows; i++)
{
uchar *p = dst.ptr<uchar>(i);
for( int j = 0; j < dst.cols; j++)
{
p[j] = 30*p[j];
}
}
cout << "标号" << "\t" << "面积" << endl;
for(vector<Feather>::iterator it = featherList.begin(); it < featherList.end(); it++)
{
cout << it->label << "\t" << it->area << endl;
rectangle(dst, it->boundingbox, 255);
}
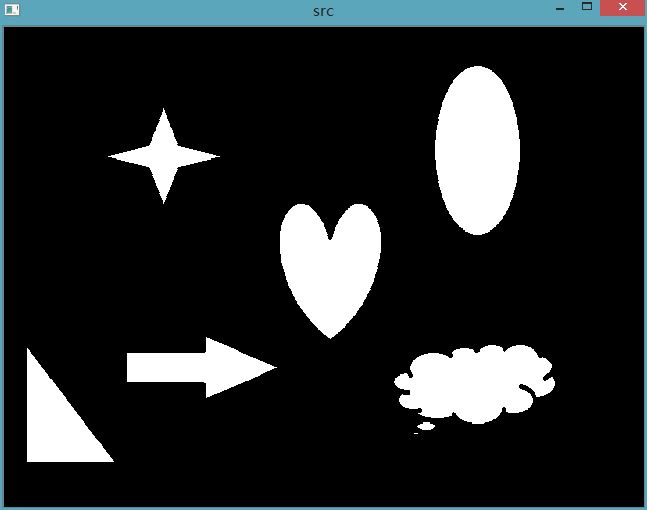
imshow("src", src);
imshow("dst", dst);
waitKey();
destroyAllWindows();
system("pause");
return 0;
}
运行结果:
原图:
检测结果:
特征清单: