参考:https://www.cnblogs.com/6DAN_HUST/archive/2010/07/29/1787965.html
1. BDI的概念
主体的信念-愿望-意图(Belief-Desire-Intention, BDI)概念的哲学观点源自Bratman。
- 信念——Agent具有的关于环境信息、其他Agent信息和自身信息的集合。信念不同于知识,知识是为真的信念。
- 愿望——Agent希望达到的状态或者希望保持的状态,分别称作实现型愿望和维护型愿望。可能有机会实现,也可能永远不去实现。
- 意图——承诺的愿望。最明显的性质是它将导致行为。主要作用:(1)意图驱动手段目的推理(2)意图约束未来的慎思过程(或目标的选择)(3)意图持续地控制着主体的行为(4)意图影响未来实际推理所基于的信念。
2. BDI Agent模型的一般结构
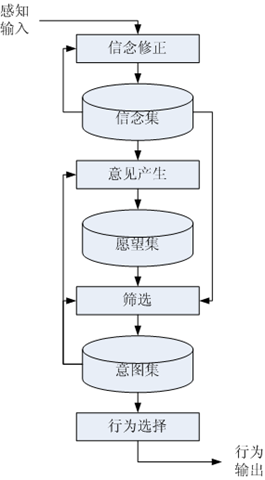
图1 BDI Agent的一般结构
设Bel为所有可能信念的集合,Des为所有可能愿望的集合,Int为所有可能意图的集合。在任意时刻,一个BDI Agent的状态表示为 ,其中
,其中 。P表示当前感知的集合。
。P表示当前感知的集合。
| 主要成分 |
含义 |
形式化定义 |
| 当前信念集 |
表示Agent所具有的关于其当前环境的信息 |
|
| 信念求精函数 (brf) |
根据Agent的感知输入和Agent的当前信念确定新的信念集 |
|
| 愿望产生函数 (options) |
依据Agent关于其环境和目前意图的当前信念确定Agent可能的愿望 |
|
| 当前愿望集 |
表示Agent可用的行为的可能过程 |
|
| 筛选函数 (filter) |
代表Agent的慎思过程,该函数基于Agent的当前信念、愿望和意图确定Agent的新意图 |
|
| 当前意图集 |
表示Agent的当前主要任务——承诺试图求解的事件状态 |
|
| 行为选择函数 (execute) |
基于当前意图确定要执行的行为 |
|




表1 BDI Agent 7个主要成分
Agent决策函数action:
伪代码定义:
fuction action(p:P):A;
begin
B:=brf(B,p);
D:=options(B,I);
I:=filter(B,D,I);
return execute(I);end;
3. 典型的BDI Agent结构
1) IRMA (Bratman 1988)
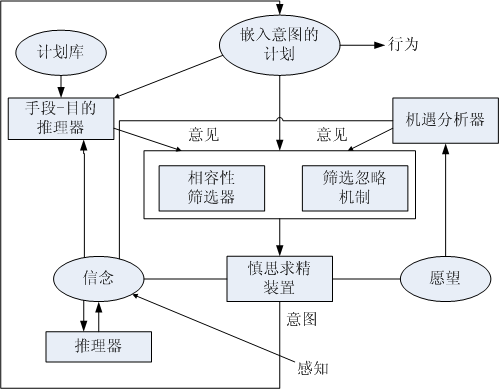
图2 IRMA的结构
2) PRS (Georgeff and Lankey )
PRS(Process Reasoning System)过程推理系统,是在动态环境下推理和执行任务的一个系统。是在NASA的Space Shuttle项目中的一个反应控制系统内开发的,以Rao和Georgeff提出的一个完备理论背景为基础。

图3 PRS的结构
3) COSY (Burmeister and Sundermeyer 1992)
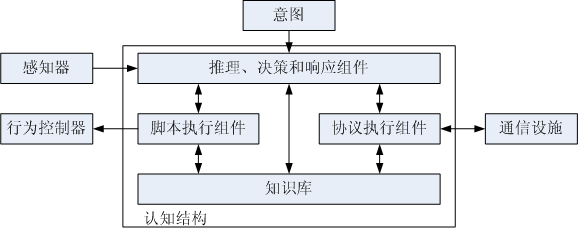
图4 COSY主体结构
- 知识库中含有信念
- 意图构件中表示了愿望(即战略意图)
- 所选定的脚本和协议化了主体的意图(即战术意图)
- RDRC组件负责推理,响应环境变化,确定如何更好地获取目标和实现意图,部分任务需要在交互过程中处理决策。
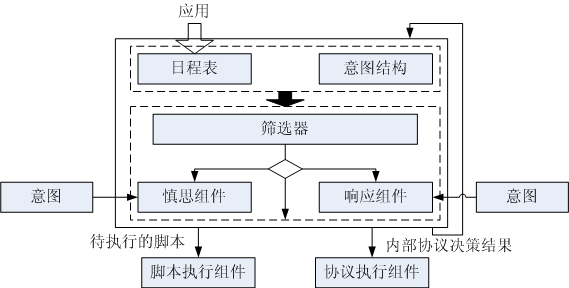
图5 RDRC的结构
4) GRATE (Jennings 1993)
GRATE中第一次将联合意图和联合责任的概念引入到BDI结构中,从而使BDI主体的研究进入到多主体时代。
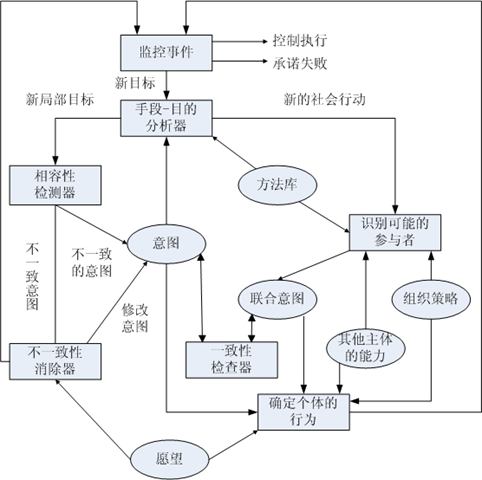
图6 GRATE的功能结构
局部问题求解的结果或环境的变化将引起事件发生,“事件监控器”负责监控事件的发生。事件预示需要一个新的活动和由此产生一个新的目标。新的目标输入到“手段-目的分析器”中。“手段-目的分析器”查阅“方法库”发现合适的计划以完成该目标。这些计划表明该目标是否能局部完成、协作完成或从二者之间做出选择。
a) 局部完成一个目标,通过“相容性检测器”检测目标和满足目标的手段与已存在的意图是否一致,如果发现不一致性,由“不一致消除器”修改已存在的承诺,或改变目标以消除冲突。
a) 协作完成一个目标,则必须建立社会行为。第一阶段:识别能够完成该目标的主体集合,形成协作小组,产生概要联合意图。第二阶段:完善方案概要(即产生社会计划),并将要完成的行为分配到能够承担这些任务的主体中(即职责分配)。计划的选择、产生和职责分配的结果都将传送到群组中的每一个成员,并最终要求他们完成局部的手段-目的的推理,以使基本行为适合于他们已存在的承诺同时满足相关行为之间的联系。每当一个新的个体或一个联合行为被提出,“一致性检查器”检查是否个体意图与联合意图相一致。
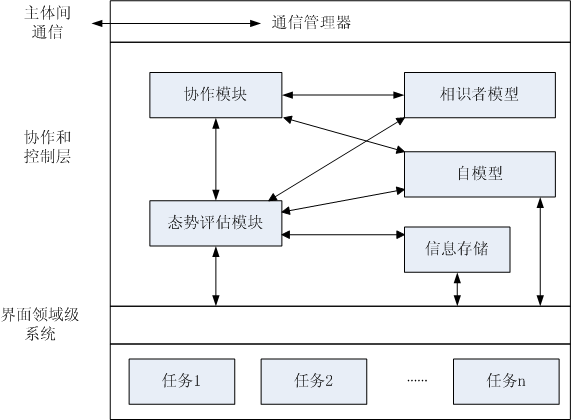
图7 GRATE的实现结构
领域级问题作为任务提出,协作控制层将任务作为处理的基本单位。
| 模块 |
功能 |
| 态势评估模块 |
监控事件、手段-目的分析、相容性检查器 不一致消除器、一致性检测 |
| 协作模块 |
识别可能的参与者 |
| 自模型 |
规划库、意图、联合意图和愿望 |
| 相识者模型 |
其他主体的能力 |
表2 GRATE实现结构模块及对应的功能
参考文献:
[1] 张维明. 智能协作信息技术. 北京: 电子工业出版社, 2002.4
[2] 石纯一, 张伟. 基于Agent的计算. 清华大学出版社, 2007.5