众所周知,Linux 2.6引入了非常经典的设备模型,最近发现在驱动和设备attach时,会设置GPIO状态为default哦,而且在设备驱动probe()调用之前,什么情况?且听我慢慢道来,呵呵
那我们就从__device_attach_driver()函数开始吧?
LINUX/android/kernel/drivers/base/dd.c
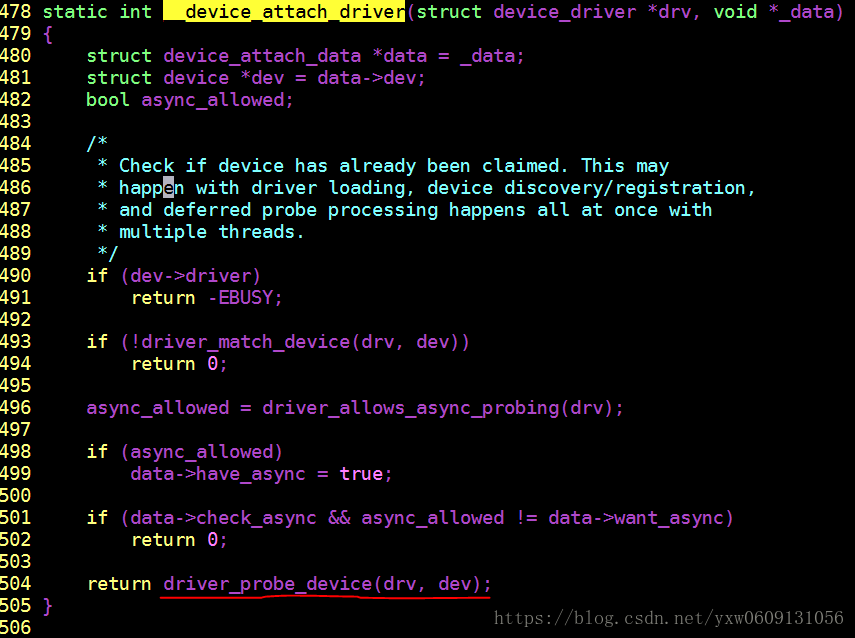
这个函数最后会调用driver_probe_device()函数,
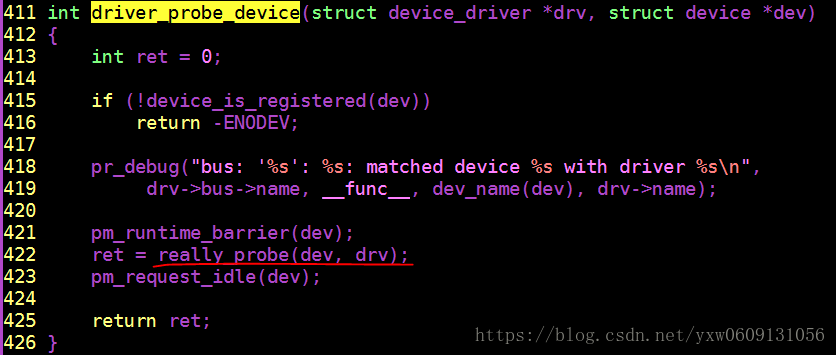
这个函数又调用了really_probe()

继而又调用pinctrl_bind_pins()
LINUX/android/kernel/drivers/base/pinctrl.c
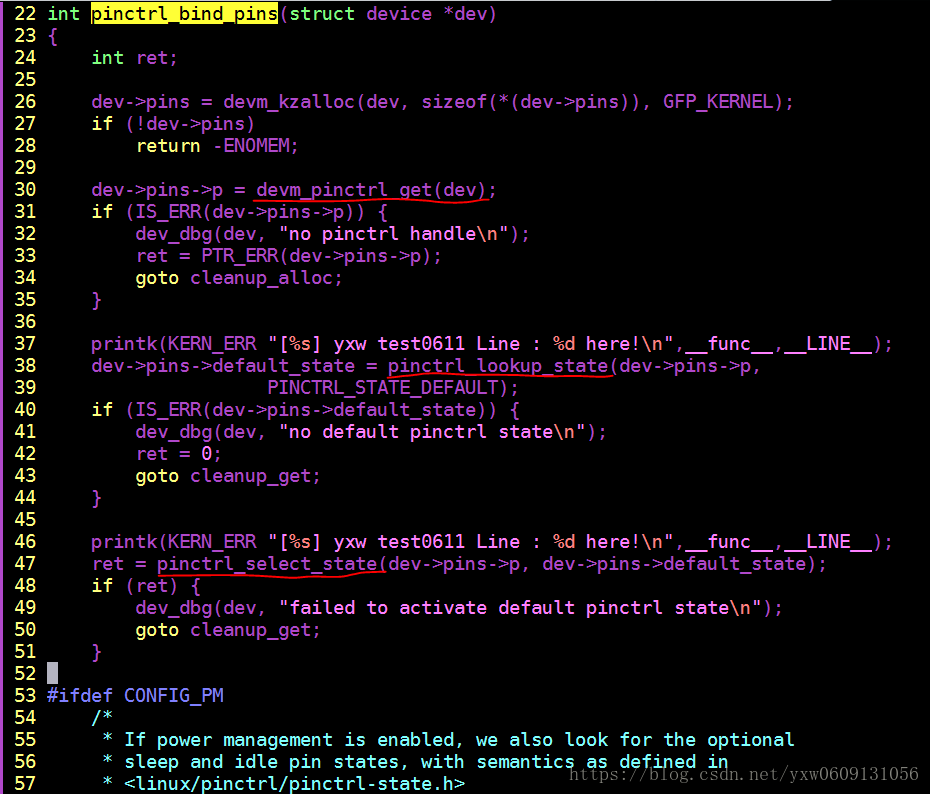
这个函数将依次调用devm_pinctrl_get()、pinctrl_lookup_state()和pinctrl_select_state()将相应GPIO配置为default 状态(具体DTS中配置的参数)。
这里以pinctrl_select_state()为例分析具体设置过程:
LINUX/android/kernel/drivers/pinctrl/core.c

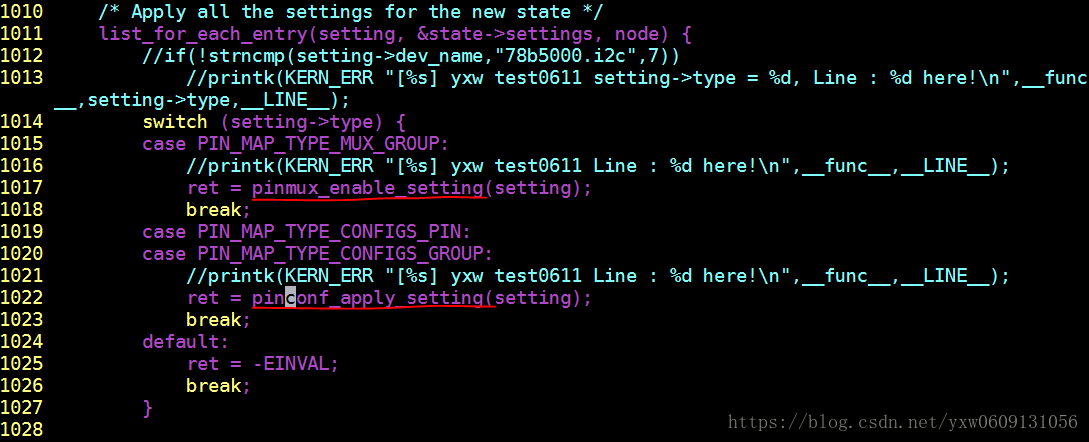
其中pinmux_enable_setting()负责将相应GPIO配置成相应的功能号
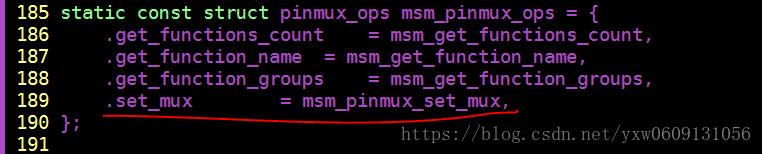
LINUX/android/kernel/drivers/pinctrl/pinmux.c


set_mux()接口每个平台具体实现不同,针对高通平台实现如下:
LINUX/android/kernel/drivers/pinctrl/qcom/pinctrl-msm.c
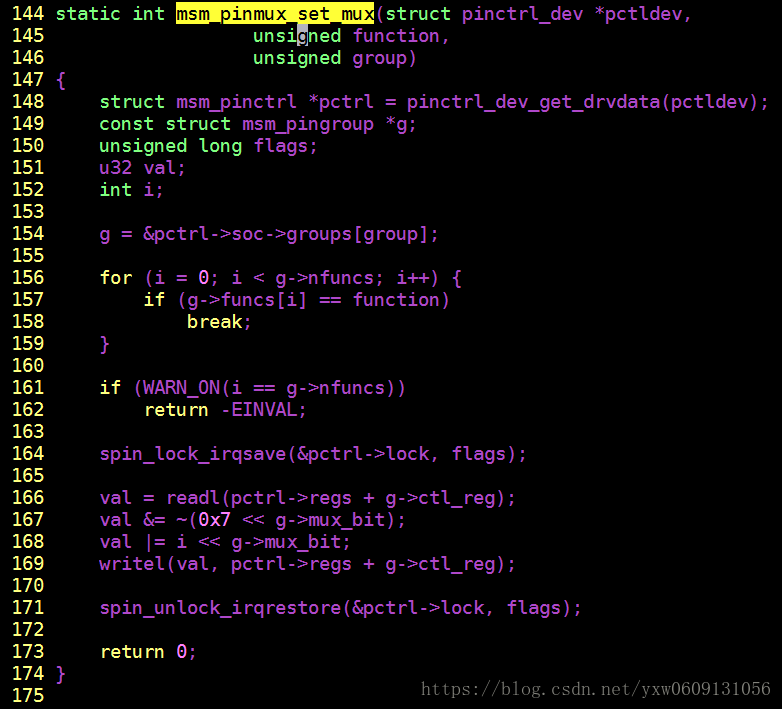
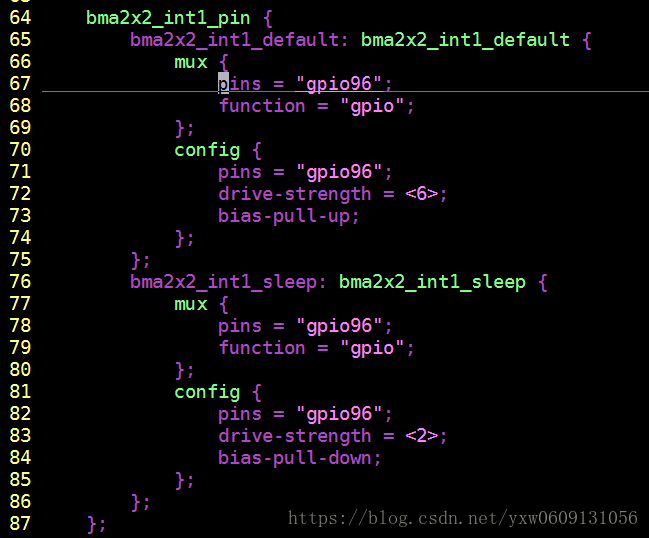
最终设置相应的寄存器,完成相应的GPIO功能配置,对于GPIO96而言,就是将其配置成普通GPIO。
而pinconf_apply_setting()函数则负责实现具体的配置,如pull-up,drive-strength等等
LINUX/android/kernel/drivers/pinctrl/pinconf.c

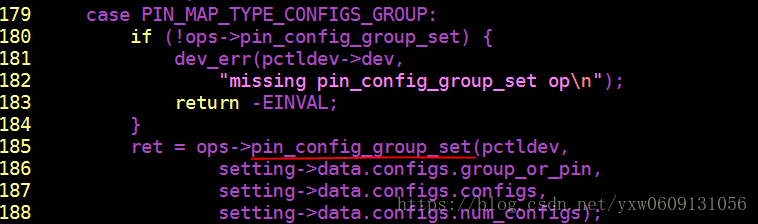
pin_config_group_set()接口每个平台具体实现不同,针对高通平台实现如下:
LINUX/android/kernel/drivers/pinctrl/qcom/pinctrl-msm.c


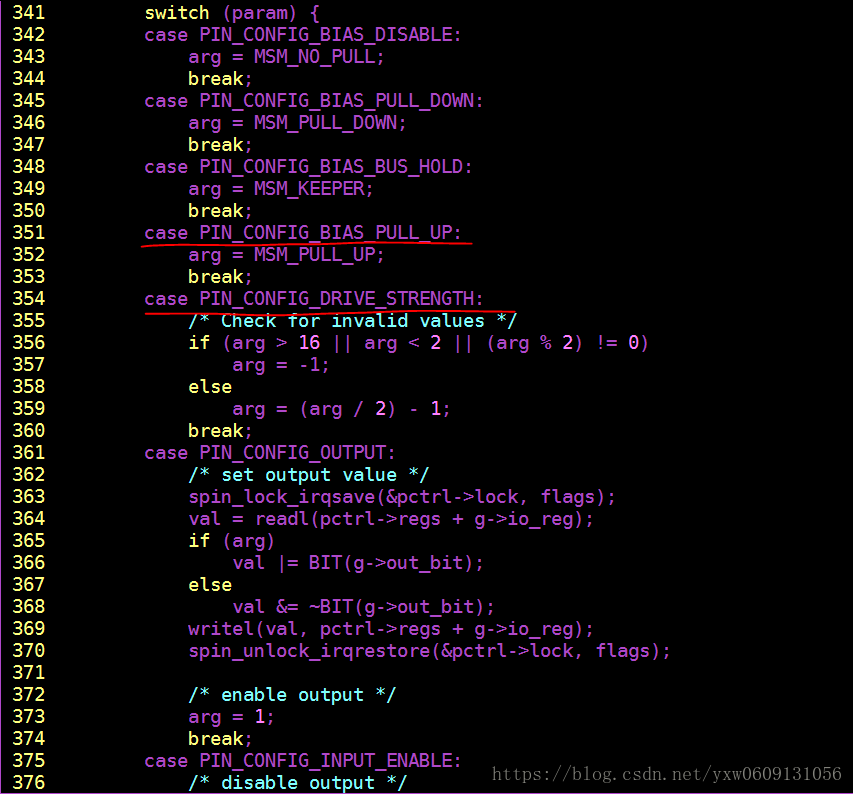
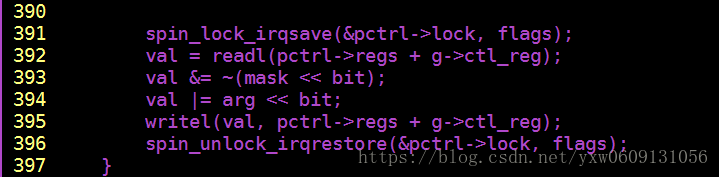
最终也是通过配置寄存器,完成相应GPIO配置,对GPIO96而言,就是bias-pull-up和drive-strength配置。
当然也可以在设备驱动中,通过调用devm_pinctrl_get()、pinctrl_lookup_state()和pinctrl_select_state()来配置相应的GPIO。
两者调用过程基本一致哦,呵呵
希望大家留言讨论,期待与你一起学习,一起进步^_^