为了得出D-H参数表,我们首先需要针对六轴机器人的各个关节建立坐标系,在固定的坐标系下,才能最终得出连杆之间的变换关系,从而建立D-H参数表。
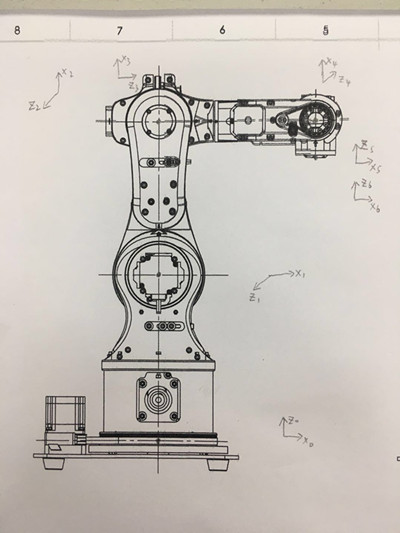
算法坐标系确定的通用方法如下:
1) 坐标系的Z轴,与各个关节的旋转中心轴线重合
2) 坐标系的X轴,与沿着相邻两个Z轴的公垂线重合
3) 坐标系的Y轴,可以通过右手定则来确定
当相邻两个Z轴相交时,确定坐标系的方法如下:
1)坐标系的Y轴,沿着第一个Z轴与下一个Z轴相交的延长线为Y轴
2)坐标系的X轴,通过右手定则确定
当相邻两个Z轴平行时,确定坐标系的方法如下:
1) 坐标系X轴,相邻两个Z轴平行,做两个Z轴的公垂线,相交于下一个Z轴为X轴,方向为第一个Z轴到下一个Z轴的方向
2) 坐标系Y轴,通过右手定则确定

RobotAnno V6+

RobotAnno V6淘宝店二维码
购买RobotAnno V6+六轴机械臂(能够有比较大的优惠)
或者
需要交流六轴机械臂算法
或者
需要六轴机械臂资料或者代码:
联系方式:
QQ:2463778451
微信:

所有文章均为原创,转载请注明出处。