参考文章
- zedboard运行linaro系统
- ZYNQ学习记录之 zynq zc706 ps端sdboot运行 linaro ubuntu
- Linux with HDMI video output on the ZED, ZC702 and ZC706 boards
1.Preparing the SD-card
sudo apt isntall gparted
sudo gparted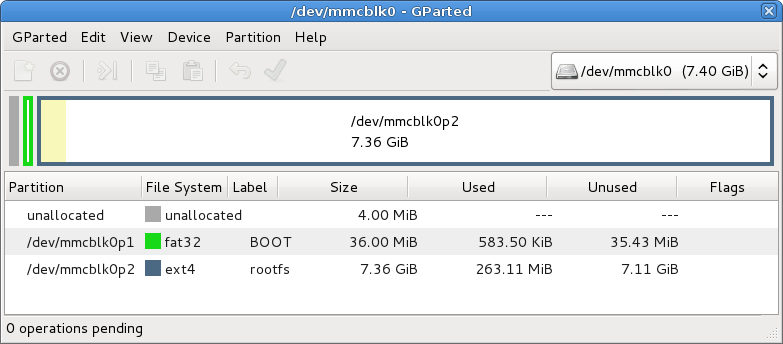
2.Build the boot image
2.1 Compile u-boot
git clone https://github.com/Xilinx/u-boot-xlnx.git
git checkout xilinx-v201*.*
source /../Vivado/201*.*/setting64.sh
export CROSS_COMPILE=/../arm-linux-gnueabihf-
make ARCH=arm CROSS_COMPILE=/../arm-linux-gnueabihf- zynq_z*_config
make ARCH=arm CROSS_COMPILE=/../arm-linux-gnueabihf-
mv u-boot u-boot.elf2.2 Vivado
- Create Project –> Boards
- Create Block Design –> IP Catalog(ZYNQ7 Processing System) –> Run Block Automation
- 双击 –> Re-customize IP
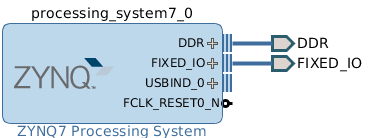
- Clock Configuration –> PL Fabric Clocks –> FCLK_CLK0 –> 取消
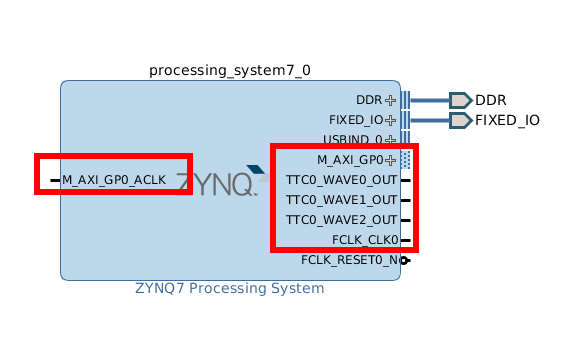
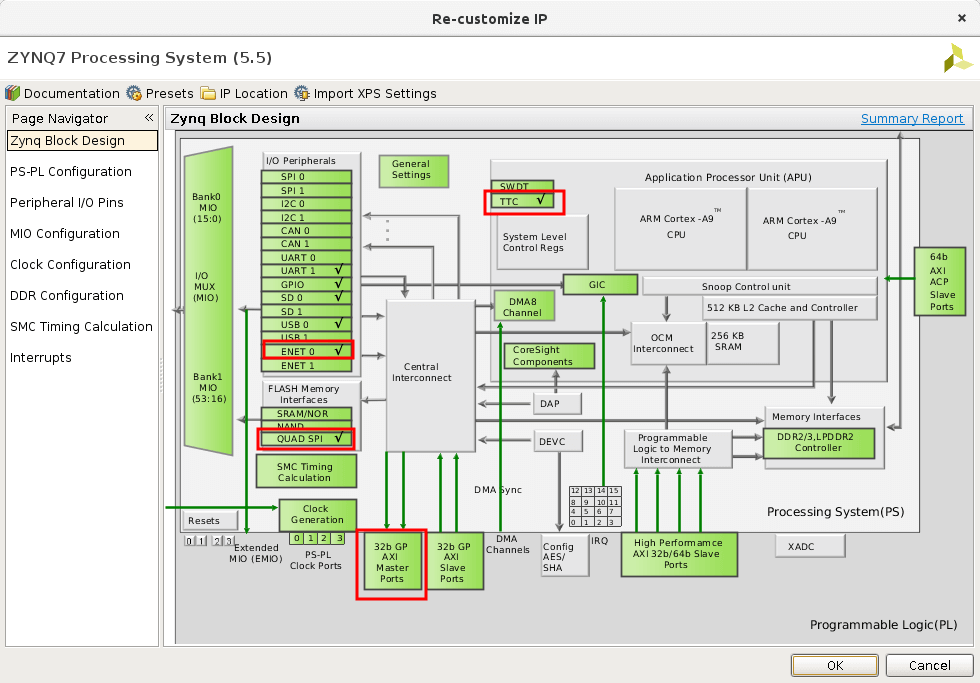
- 双击TTC –> 取消
- ……
- 右键单击 –> Regenerate Layout
- Create HDL Wrapper…
- Generate Bitstream
- File –> Export –> Export Hardware –> Include bitstream
- File -> Launch SDK
File –> New –> Application Project
Project name: fsbl
Next –> Templates –> Zynq FSBL –> Finish
Build Project
2.3 Generate BOOT.BIN
- Project Explorer –> Create Boot Image
FSBL
bitstream
u-boot.elf
3.Build kernel image
sudo apt install u-boot-tools
git clone https://github.com/Xilinx/linux-xlnx
git checkout xilinx-v201*.*
export CROSS_COMPILE=/../arm-linux-gnueabihf-
make ARCH=arm CROSS_COMPILE=/../arm-linux-gnueabihf- xilinx_zynq_defconfig
make ARCH=arm CROSS_COMPILE=/../arm-linux-gnueabihf-
make uImage LOADADDR=0x000080004.Compile devicetree
5.BOOT rootfs
sudo cp * /media/username/BOOT/
sudo tar zxvf linar*.tar.gz
sudo rsync -a --progress ./ /media/username/rootfs/