判断viewing ray和sphere的相交
联立viewing ray和sphere的向量形式方程可得:

将该式进行转化,把t提出来,可得:

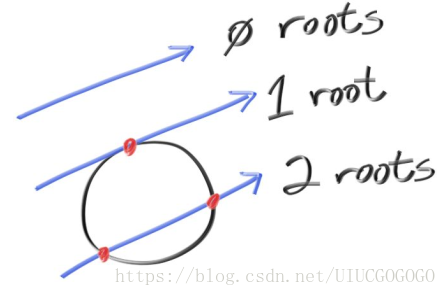
此即为一个关于t的一元二次方程,由该方程的判别式可以得知ray与sphere的相交情况:
(PS:此处仅仅根据判别式大于零便确定相交,相当于将viewing ray视为了直线而非射线,当球体置于origin后面时也会得到与最终结果相同的图像,是存在问题的,正确的情况下应该对t进行约束)
球体依然置于camera frame下:
#include"vector.h"
#include"ray.h"
#include<iostream>
#include<fstream>
using namespace std;
//camera朝上为y,朝image plain为-z,向右为x
//判断viewing ray是否与球体相交
bool hit_sphere(const vec3& center, float radius, const ray& r)
{
//联立viewing ray和sphere的向量形式方程,再将t提出来
//可以得到一个关于t的一元二次方程,而以下的a、b、c即为
//相应系数
vec3 oc = r.origin() - center;
float a = dot(r.direction(), r.direction());
float b = 2.0*dot(oc, r.direction());
float c = dot(oc, oc) - radius*radius;
float disciminant = b*b - 4 * a*c;
return (disciminant > 0);
}
vec3 color(const ray& r)//设置背景色(由y值决定蓝白)
{
//如果ray接触到了球心位于(0,0,-1),半径为0.5的球体,则返回红色
if (hit_sphere(vec3(0, 0, -1), 0.5, r))
return vec3(1, 0, 0);
vec3 unit_direction = unit_vector(r.direction());//得到单位方向向量,将y限定在-1至1之间
float t = 0.5*(unit_direction.y() + 1);//间接用t代表y,将其限制在0至1之间
return (1.0 - t)*vec3(1.0, 1.0, 1.0) + t*vec3(0.5, 0.7, 1.0);
//所谓插值法,不同的ray对应的t不同,这些t决定了其对应的color为(1.0,1.0,1.0)和(0.5,0.7,1.0)之间某一RGB颜色
//RGB各分量实际就是一个介于0.0至1.0的小数
}
int main()
{
int nx = 200;//200列
int ny = 100;//100行
ofstream out("d:\\theFirstPpm.txt");
out << "P3\n" << nx << " " << ny << "\n255" << endl;
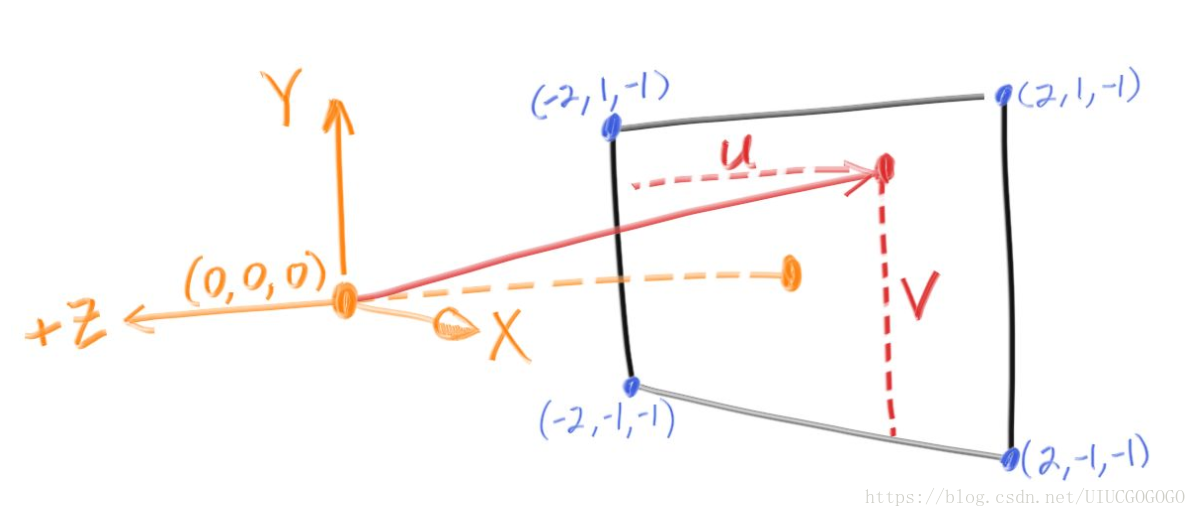
vec3 lower_left_corner(-2.0, -1.0, -1.0);//image plain在camera frame中左下角坐标
vec3 horizontal(4.0, 0.0, 0.0);//image plain在camera frame中水平方向的量度
vec3 vertical(0.0, 2.0, 0.0);//image plain在camera frame中竖直方向的量度
vec3 origin(0.0, 0.0, 0.0);
for (int j = ny - 1;j >= 0;j--)//行从上到下
{
for (int i = 0;i < nx;i++)//列从左到右
{
float u = float(i) / float(nx);//当前pixel在水平方向上的比例(相对位置)
float v = float(j) / float(ny);
//构造viewing ray,direction参数实际就是intersection在camera frame中的坐标
ray r(origin, lower_left_corner + u*horizontal + v*vertical);//将左下角作为求坐标时的参考点
vec3 col = color(r);
int ir = int(255.99*col[0]);
int ig = int(255.99*col[1]);
int ib = int(255.99*col[2]);
out << ir << " " << ig << " " << ib << endl;
}
}
return 0;
}最终结果:
