这里开始是实例了!理论看前一篇文章。
1.普遍文章里温度的例子
目的:估算k时刻的实际温度值
输入:k-1时刻的温度值,预测模型的误差方差,测量模型的误差方差。
计算过程:
(1)预测模型和测量模型为:
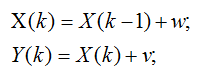
状态变量为温度值X,预测模型认为k时刻会延续k-1时刻的温度值,方差为w;测量值也为温度,所以和状态变量的关系为H=1,方差为v。
(2)假设k-1时刻的温度为23度,预测标准差为5度。测量得到k时刻的温度为25度,测量标准差为4度。
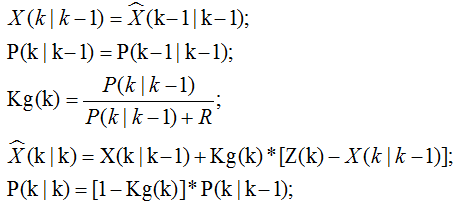
(3)方程的系数为A=1;B=0;H=1,5个核心公式如下:
扫描二维码关注公众号,回复:
3624072 查看本文章

其中:Q=5,R=4.
所以,k时刻时候:
X(k|k-1)=23;
P(k|k-1)=5*5;
Kg(k)=5*5/(5*5+4*4)=0.78;
X(k|k)=23+0.78*[25-23]=24.56.
P(k|k)=[1-0.78]*25=5.5。
以上,k时刻的最优估计为24.56度。k时刻的最优值的方差为5.5。
2.论文中测距的例子
问题:在雷达定位时,目标位置不变,获得多次目标的距离值Ri,真实距离值恒定不变,在测量过程中真实值受到加性噪声n(k)的干扰,任意两个不同时刻的噪声互不相关。
(1)系统的预测模型和测量模型为
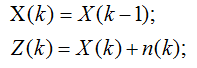
状态变量为距离值X,预测模型认为k时刻会延续k-1时刻的距离值,方差为0;测量值也为距离值,所以和状态变量的关系为H=1,方差为n(k)。
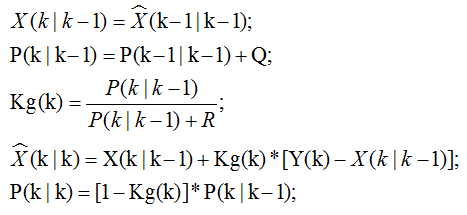
(2)方程的系数为
A=1,B=0,H=1,Q=0.5个核心公式如下