前言
最近在学习区域卷积神经网络(RCNN)时,候选框产生使用了选择搜索(selective search),为了更透彻地理解RCNN的工作原理,所以决定基于python代码,实现选择搜索(selective search)。
简介
关于选择搜索(selective search)的基本原理和初步认知,可以参考以下博客:
https://blog.csdn.net/mao_kun/article/details/50576003
在这里主要结合自己的理解作简要总结和梳理:
- 使用 Efficient Graph-Based Image Segmentation的方法获取原始分割区域R={r1,r2,…,rn},具体可见我的另一篇博客:
https://blog.csdn.net/u014796085/article/details/83449972 - 初始化相似度集合S=∅
- 计算两两相邻区域之间的相似度,将其添加到相似度集合S中
- 从相似度集合S中找出,相似度最大的两个区域 ri 和rj,将其合并成为一个区域 rt,从相似度集合中除去原先与ri和rj相邻区域之间计算的相似度,计算rt与其相邻区域(原先与ri或rj相邻的区域)的相似度,将其结果添加的到相似度集合S中。同时将新区域 rt 添加区域集合R中。
- 重复步骤5,直到S=∅,即最后一个新区域rt为整幅图像。
- 获取R中每个区域的Bounding Boxes,去除像素数量小于2000,以及宽高比大于1.2的,剩余的框就是物体位置的可能结果L
代码实现与解读
图像初步分割
def _generate_segments(img_path, neighbor, sigma, scale, min_size):
# open the Image
im_mask = graphbased_segmentation(img_path, neighbor, sigma, scale, min_size)
im_orig = skimage.io.imread(img_path)
# merge mask channel to the image as a 4th channel
im_orig = numpy.append(
im_orig, numpy.zeros(im_orig.shape[:2])[:, :, numpy.newaxis], axis=2)
im_orig[:, :, 3] = im_mask
return im_orig
对原图像作图像分割,把分割的每个像素所属区域的编号作为图像的第4通道。
区域相似度的定义
def _calc_colour_hist(img):
"""
calculate colour histogram for each region
the size of output histogram will be BINS * COLOUR_CHANNELS(3)
number of bins is 25 as same as [uijlings_ijcv2013_draft.pdf]
extract HSV
"""
BINS = 25
hist = numpy.array([])
for colour_channel in (0, 1, 2):
# extracting one colour channel
c = img[:, colour_channel]
# calculate histogram for each colour and join to the result
hist = numpy.concatenate(
[hist] + [numpy.histogram(c, BINS, (0.0, 255.0))[0]])
# L1 normalize
hist = hist / len(img)
return hist
def _calc_texture_gradient(img):
"""
calculate texture gradient for entire image
The original SelectiveSearch algorithm proposed Gaussian derivative
for 8 orientations, but we use LBP instead.
output will be [height(*)][width(*)]
"""
ret = numpy.zeros((img.shape[0], img.shape[1], img.shape[2]))
for colour_channel in (0, 1, 2):
ret[:, :, colour_channel] = skimage.feature.local_binary_pattern(
img[:, :, colour_channel], 8, 1.0)
return ret
def _calc_texture_hist(img):
"""
calculate texture histogram for each region
calculate the histogram of gradient for each colours
the size of output histogram will be
BINS * ORIENTATIONS * COLOUR_CHANNELS(3)
"""
BINS = 10
hist = numpy.array([])
for colour_channel in (0, 1, 2):
# mask by the colour channel
fd = img[:, colour_channel]
# calculate histogram for each orientation and concatenate them all
# and join to the result
hist = numpy.concatenate(
[hist] + [numpy.histogram(fd, BINS, (0.0, 1.0))[0]])
# L1 Normalize
hist = hist / len(img)
return hist
_calc_colour_hist(img),计算图像的颜色直方图,用于计算两个区域的颜色相似度。
_calc_texture_gradient(img),计算图像的纹理梯度,用于计算其纹理直方图。
_calc_texture_hist(img),计算纹理直方图,用来计算两个区域的纹理相似度。
def _sim_colour(r1, r2):
"""
calculate the sum of histogram intersection of colour
"""
# return sum([min(a, b) for a, b in zip(r1["hist_c"], r2["hist_c"])])
return sum([1 if a==b else 1-float(abs(a - b))/max(a, b) for a, b in zip(r1["hist_c"], r2["hist_c"])])/len(r1)
def _sim_texture(r1, r2):
"""
calculate the sum of histogram intersection of texture
"""
# return sum([min(a, b) for a, b in zip(r1["hist_t"], r2["hist_t"])])
return sum([1 if a==b else 1-float(abs(a - b))/max(a, b) for a, b in zip(r1["hist_t"], r2["hist_t"])])/len(r1)
def _sim_size(r1, r2, imsize):
"""
calculate the size similarity over the image
"""
return 1.0 - (r1["size"] + r2["size"]) / imsize
def _sim_fill(r1, r2, imsize):
"""
calculate the fill similarity over the image
"""
bbsize = (
(max(r1["max_x"], r2["max_x"]) - min(r1["min_x"], r2["min_x"]))
* (max(r1["max_y"], r2["max_y"]) - min(r1["min_y"], r2["min_y"]))
)
return 1.0 - (bbsize - r1["size"] - r2["size"]) / imsize
def _calc_sim(r1, r2, imsize):
return (_sim_colour(r1, r2) + _sim_texture(r1, r2)
+ _sim_size(r1, r2, imsize) + _sim_fill(r1, r2, imsize))
计算区域r1,r2的颜色相似度、纹理相似度、大小相似度、吻合相似度,将几种相似度结合到一起,得到r1、r2综合相似度。具体可以参见简介中第一篇博客。
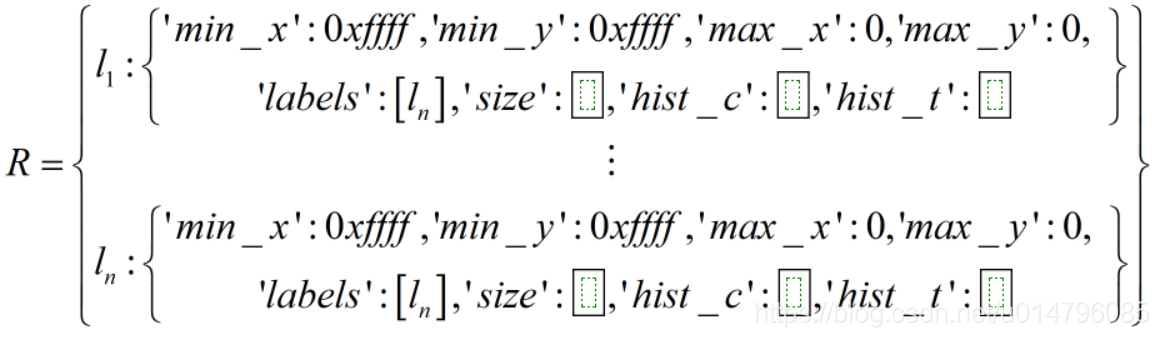
创建区域词典R
def _extract_regions(img):
# 创建字典
R = {}
# get hsv image
hsv = skimage.color.rgb2hsv(img[:, :, :3])
# pass 1: count pixel positions
# 遍历img中所有的元素,y为索引,i为一个(r,g,b,l)
for y, i in enumerate(img):
for x, (r, g, b, l) in enumerate(i):
# initialize a new region
if l not in R:
R[l] = {
"min_x": 0xffff, "min_y": 0xffff,
"max_x": 0, "max_y": 0, "labels": [l]}
# bounding box
if R[l]["min_x"] > x:
R[l]["min_x"] = x
if R[l]["min_y"] > y:
R[l]["min_y"] = y
if R[l]["max_x"] < x:
R[l]["max_x"] = x
if R[l]["max_y"] < y:
R[l]["max_y"] = y
# pass 2: calculate texture gradient
tex_grad = _calc_texture_gradient(img)
# pass 3: calculate colour histogram of each region
for k, v in list(R.items()):
# colour histogram
masked_pixels = hsv[:, :, :][img[:, :, 3] == k]
R[k]["size"] = len(masked_pixels / 4)
R[k]["hist_c"] = _calc_colour_hist(masked_pixels)
# texture histogram
R[k]["hist_t"] = _calc_texture_hist(tex_grad[:, :][img[:, :, 3] == k])
return R
创建区域字典R,n为区域数。
创建邻接列表neighbours
def _extract_neighbours(regions):
def intersect(a, b):
if (a["min_x"] < b["min_x"] < a["max_x"]
and a["min_y"] < b["min_y"] < a["max_y"]) or (
a["min_x"] < b["max_x"] < a["max_x"]
and a["min_y"] < b["max_y"] < a["max_y"]) or (
a["min_x"] < b["min_x"] < a["max_x"]
and a["min_y"] < b["max_y"] < a["max_y"]) or (
a["min_x"] < b["max_x"] < a["max_x"]
and a["min_y"] < b["min_y"] < a["max_y"]):
return True
return False
R = list(regions.items())
neighbours = []
for cur, a in enumerate(R[:-1]):
for b in R[cur + 1:]:
if intersect(a[1], b[1]):
neighbours.append((a, b))
return neighbours
(1) 定义两区域相交:区域b的最小外接矩形中任意一个顶点,在区域a的最小外接矩形内部,就认为区域a和b相交。a,b相交即认为a、b相邻。
(2) 不重复遍历R中所有的一对区域,如果相交,就加入到相邻列表neighbours中。
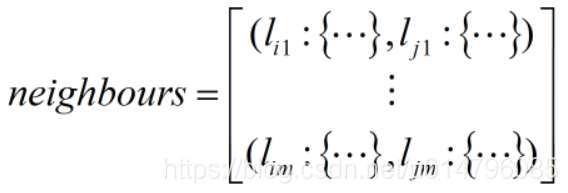
为区域的编号,{…}为描述该区域的词典。
定义区域合并
def _merge_regions(r1, r2):
new_size = r1["size"] + r2["size"]
rt = {
"min_x": min(r1["min_x"], r2["min_x"]),
"min_y": min(r1["min_y"], r2["min_y"]),
"max_x": max(r1["max_x"], r2["max_x"]),
"max_y": max(r1["max_y"], r2["max_y"]),
"size": new_size,
"hist_c": (
r1["hist_c"] * r1["size"] + r2["hist_c"] * r2["size"]) / new_size,
"hist_t": (
r1["hist_t"] * r1["size"] + r2["hist_t"] * r2["size"]) / new_size,
"labels": r1["labels"] + r2["labels"]
}
return rt
合并区域r1、r2,生成新的区域rt,注意此时区域词典R中r1、r2对应的词典不删除、不改变,只增加新区域rt对应的词典。
选择搜索
def selective_search(
img_path, neighbor, sigma, scale, min_size):
# load image and get smallest regions
# region label is stored in the 4th value of each pixel [r,g,b,(region)]
img = _generate_segments(img_path, neighbor, sigma, scale, min_size)
if img is None:
return None, {}
imsize = img.shape[0] * img.shape[1]
R = _extract_regions(img)
# print(R[0])
# extract neighbouring information
neighbours = _extract_neighbours(R)
# print(neighbours[0])
# calculate initial similarities
# 创建字典
S = {}
for (ai, ar), (bi, br) in neighbours:
# print(ai)
# print(bi)
S[(ai, bi)] = _calc_sim(ar, br, imsize)
# hierarchal search
while S != {}:
# get highest similarity
i, j = sorted(S.items(), key=lambda i: i[1])[-1][0]
# merge corresponding regions
t = max(R.keys()) + 1.0
R[t] = _merge_regions(R[i], R[j])
# mark similarities for regions to be removed
key_to_delete = []
for k, v in list(S.items()):
if (i in k) or (j in k):
# 去除这两个区域与相邻区域的相似度
key_to_delete.append(k)
# remove old similarities of related regions
for k in key_to_delete:
del S[k]
# calculate similarity set with the new region
# 计算合并后区域与相邻区域的相似度
for k in [a for a in key_to_delete if a != (i, j)]:
n = k[1] if k[0] in (i, j) else k[0]
S[(t, n)] = _calc_sim(R[t], R[n], imsize)
regions = []
for k, r in list(R.items()):
regions.append({
'rect': (
r['min_x'], r['min_y'],
r['max_x'] - r['min_x'], r['max_y'] - r['min_y']),
'size': r['size'],
'labels': r['labels']
})
return img, regions
(1) 图片分割,生成原始的区域词典R。
(2) 创建相似度词典S,对所有相邻区域,计算他们的相似度:
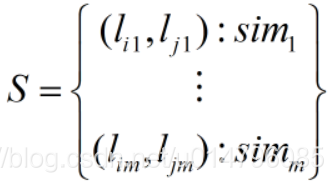
sim为两个相邻区域的综合相似度。
(3) 得到相似度最高的两个相邻区域;合并这两个相邻区域,得到新区域;去除词典S中这两个区域与相邻区域的相似度,计算合并后区域与相邻区域的相似度。重复这一步,直到S为空,即最后合并得到的新区域就是整幅图像。
(4) 创建列表region,保存区域词典R中所有区域对应的词典{‘rect’: ,‘size’: ,‘labels’: }:
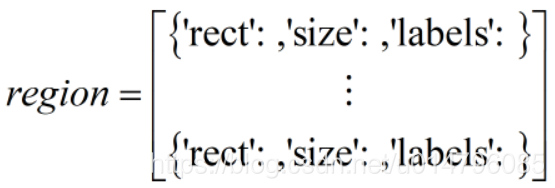
主函数
def main():
img_path = "2.jpg"
# loading astronaut image
img = skimage.io.imread(img_path)
# perform selective search
img_lbl, regions = selective_search(
img_path, neighbor = 8 , sigma = 0.5, scale = 200, min_size = 20)
# 创建集合candidate
candidates = set()
for r in regions:
# excluding same rectangle (with different segments)
if r['rect'] in candidates:
continue
# excluding regions smaller than 2000 pixels
if r['size'] < 2000:
continue
# distorted rects
x, y, w, h = r['rect']
if w / h > 1.2 or h / w > 1.2:
continue
candidates.add(r['rect'])
# draw rectangles on the original image
fig, ax = plt.subplots(ncols=1, nrows=1, figsize=(6, 6))
ax.imshow(img)
for x, y, w, h in candidates:
print(x, y, w, h)
rect = mpatches.Rectangle(
(x, y), w, h, fill=False, edgecolor='red', linewidth=1)
ax.add_patch(rect)
plt.show()
得到列表region,存储所有旧区域和新区域对应词典,取出包含像素数量大于2000的,和宽高比小于1.2的,作为候选框。
问题
关于区域的相似度(颜色、纹理、大小、吻合),不是特别理解,需要后续加以研究。