步骤:
1,数据读取
2,定标运算
3,数据保存
L=(Lmax-Lmin)/255 * DN+Lmin
L = Gain * DN + Offset
地形校正 ---- C校正
通过选取一定数量的像素,将像素值和对应的入射角拟合成一条直线,由此确定入射角和像素DN值的关系。然后将直线投影到水平地表对应的直线上,从而对影像进行校正。
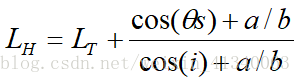
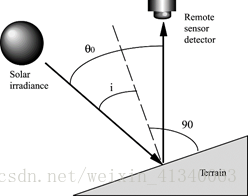
θs为太阳的天顶角;i为象元法线与太阳光入射线之间的夹角,即入射角;S表示象元坡度;A表示坡向;Фs表示太阳的方位角。
线性增强
直方图均衡化
算法步骤:
1)计算图像f(x,y)的各灰度级中像素出现的概率p(i)。
2) 计算p的累计概率函数c(i),c即为图像的累计归一化直方图。
3)将c(i)缩放至0~255范围内。