0. 变换算法
0.0 混合变换
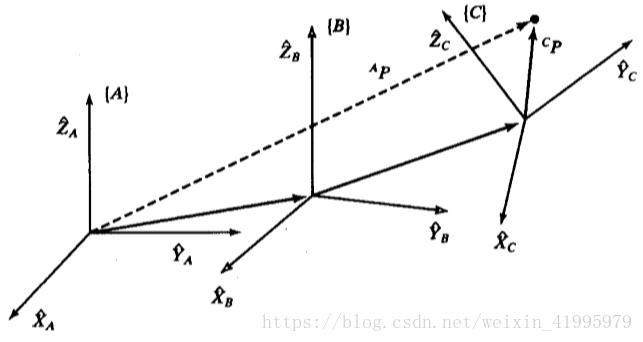
在上图的中,假设每个坐标系相对于前一个坐标系都是已知的,现在已知cP要求aP
既然每个坐标系相对前一个坐标系都是已知的,那么就意味着我们可以根据cP倒着一步步变换成aP
首先是变换成bP:

然后再由bP变换成aP:
当然,分开写比较不简洁,我们依然是比较习惯写成一个单独的表达式,那么只要综合上述两个过程,联立两条式子,就可以得到下面这条简单的表达式:
其中:
我们可以求得:
其实我个人更加喜欢从几何的角度来观察这个问题,感觉会更加简单一点。已知cP要求aP的话,我们就需要找到{C}关于{A}的变换算子,从直观上看图就可以知道,这是一个一般的变换算子,其中包含了旋转和平移。



首先单纯看平移部分,我们可以发现其实是沿着aPcorg平移的,我们又可以得到:

接着我们单纯看旋转部分,我们无法直接得到从{A}到{C}的旋转矩阵,但是我们知道从{A}到{B}的旋转矩阵和从{B}到{C}的旋转矩阵,因此我们可以得到:
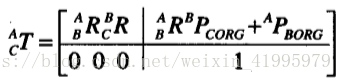
至此,我们已经可以根据求得的信息写出一个一般变换的算子了:
其实两个结果是相同的。

0.1 逆变换
已知坐标系{B}相对于{A},为了得到{A}相对于{B}的描述,我们需要求出
的逆,我们可以直接将4x4的齐次变换矩阵求逆得到,但是这样的操作并没有使用到变换的性质,我们还可以使用另外一种方式,利用变换的性质求出逆矩阵。

首先我们明确一下要求的目标:
在这里先忘记前面说的话,我们就单纯地把任务看成要求一个变换算子,那么我们就得知道旋转矩阵和位置矢量。
那么任务就变成了,由已知量:
求出未知量:


我们从位置矢量开始考虑起,我们已知了aPborg,要求bPaorg,那么就是一个将aPborg从{A}映射到{B}的过程。还记得一般坐标系映射是怎么做的吗?
bingo~
看着上面这个式子,有没有什么想法?
将{B}坐标系原点相对于{A}的描述重新映射回{B},那不就是0吗?
由此可化简得到:
这就求出bPaorg了。
那么接下来,我们看一下旋转矩阵。
我们知道,旋转矩阵是一个正交矩阵,正交矩阵又有着特殊的性质,其转置等于逆
所以,轻而易举,旋转矩阵也求出来了。
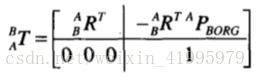
至此,我们就可以得到完整的变换算子:
这是求齐次变换逆矩阵一般而且有效的方法。