经过前面2篇WebGL射线拾取模型的文章,相信大家对射线和模型面片相交的原理已经有所了解,那么今天我们再深入探究关于射线拾取的一个问题,那就是遍历场景中的所有与射线相交的模型的优化问题。首先我们来复习一下射线拾取模型的原理,请看下图。
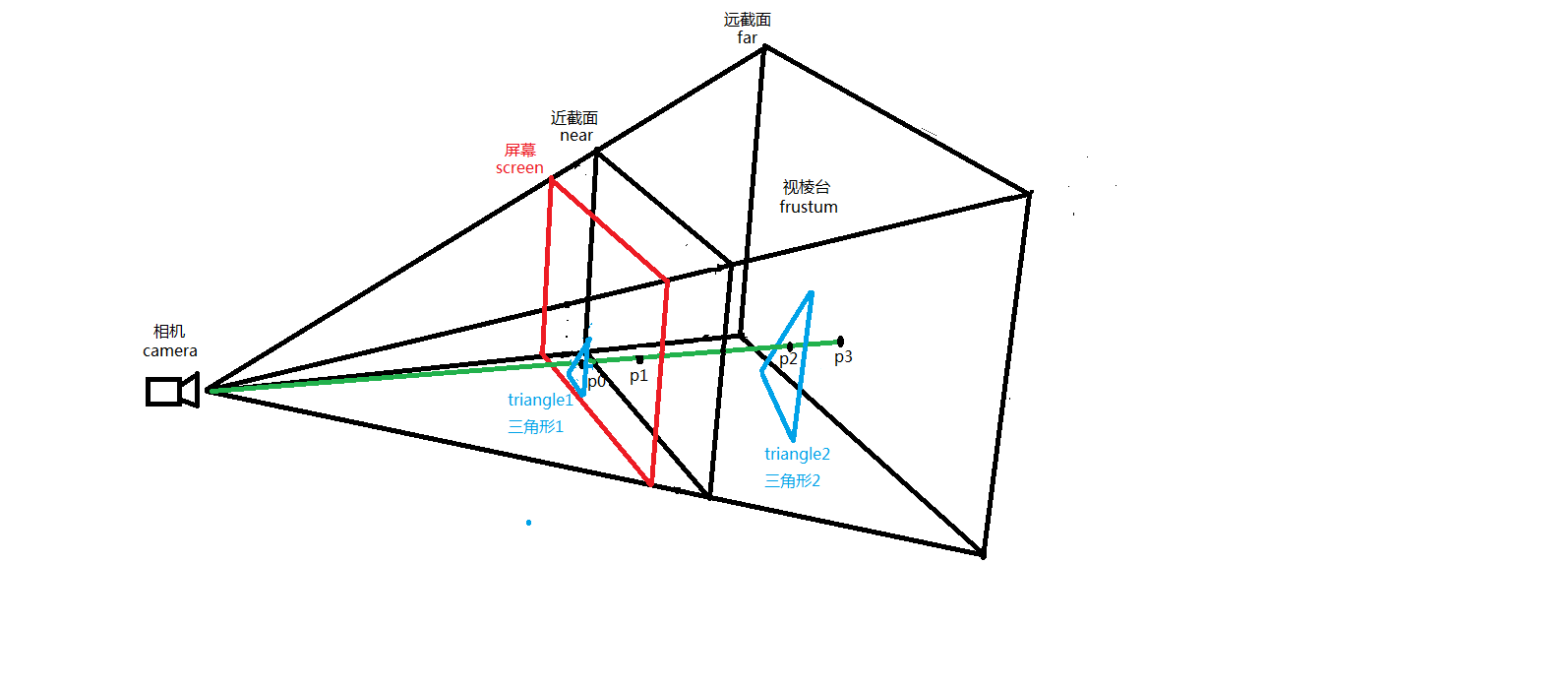
我们从上图中可以看到,在frustum视棱台区域中只有一个模型就是triangle2三角形2,那么遍历整个scene场景我们也只能取到一个geometry,取出该geometry后我们通过空间变换矩阵得到该三角形2在场景中的位置坐标以及姿态信息,再将空间中的这个已知位置和姿态的geometry去和射线P1P3求交点,如果有交点就代表鼠标拾取到了该triangle2三角形2,这就是raycaster射线拾取的基本原理,前两篇文章已经叙述过了,这里复习一下。接下来我们引入今天的话题,射线碰撞raycaster遍历场景中模型的优化。首先我们来看下图。
 我们看到在视棱台范围内存在2个模型geometry,他们分别是triangle2,triangle3两个三角形,而鼠标和相机构成的射线明显不经过triangle3这个模型,但是我们还是要遍历场景中所有的模型包括这个triangle3,遍历到的每个模型都要和射线P1P3求交点,当求得的交点数大于零则表示射线碰撞到该模型,交点数等于零表示射线没有碰到该模型,即鼠标未拾取到该模型。这就引出了我们今天的话题,那就是优化这个遍历所有模型的过程。作者:ccentry/葱烤河鲫鱼。 作为程序,我们追求的是高性能的算法,如果每次做射线拾取都要从头遍历一遍所有的模型geometry,那么系统将无疑会很卡,尤其当场景中模型的数量级达到一定的高度时,卡顿会尤其明显。那么我们就动脑筋想一个问题,我们能否不去遍历scene场景下的所有模型,只遍历必要的一部分模型,进而减少线段和三角面相交判断的计算量。答案是可以,具体怎么操作,请看下图。
我们看到在视棱台范围内存在2个模型geometry,他们分别是triangle2,triangle3两个三角形,而鼠标和相机构成的射线明显不经过triangle3这个模型,但是我们还是要遍历场景中所有的模型包括这个triangle3,遍历到的每个模型都要和射线P1P3求交点,当求得的交点数大于零则表示射线碰撞到该模型,交点数等于零表示射线没有碰到该模型,即鼠标未拾取到该模型。这就引出了我们今天的话题,那就是优化这个遍历所有模型的过程。作者:ccentry/葱烤河鲫鱼。 作为程序,我们追求的是高性能的算法,如果每次做射线拾取都要从头遍历一遍所有的模型geometry,那么系统将无疑会很卡,尤其当场景中模型的数量级达到一定的高度时,卡顿会尤其明显。那么我们就动脑筋想一个问题,我们能否不去遍历scene场景下的所有模型,只遍历必要的一部分模型,进而减少线段和三角面相交判断的计算量。答案是可以,具体怎么操作,请看下图。

我们看上图,我们将视棱台划分成8个区域,分别从区域1到区域8,所有场景中的模型geometry都分布在这8个区域中,现在我们就通过这8个区域缩小射线碰撞的遍历geometry模型的范围。具体的操作很简单,那就是先让射线和这8个区域的棱台几何体进行射线相交计算,只有与射线产生交点的棱台几何体区域才是射线检测的模型空间范围,其余和射线不产生交点的区域中的geometry模型就不必参与到raycaster检测中来,这样就极大的缩小了遍历geometry的数量,从而优化了raycaster的功能。我们来看看上图中依照8叉树优化逻辑进行的raycaster步骤。首先,射线只交2个区域的棱台他们分别是区域7和区域3,那么区域1,2,4,5,6,8中的所有geometry就都不用参与raycaster射线碰撞检测了,一下子我们就排除了Triangle3三角形3,因为他处于区域4中,不在检测区域范围内,是不是就减少了后面线段和面相交的计算量,优化了raycaster整体的性能。这是非常好的一个做法,直接缩小了检测范围,而且还能继续递归细分下去,比如区域3还能细分成8个小区域,将检测范围缩得更小,进一步排除检测区域外的多余模型,进一步减少计算量,这就是8叉树在raycaster中的优化算法,看上去很简单,其实非常的高效。
好了,也许有同学会问,你怎么知道模型geometry处在哪个区域中,对于这个问题,一句话告诉你,判断geometry的中心,即geometry模型包围盒的中心position坐标是否在区域棱台范围中即可得到答案。简单实用,对于跨区域,跨多个区域的模型也有效。那就有人抬杠了,万一跨区域的模型中心不在检测区域内,但该模型有部分在检测区域里怎么办,其实针对这种情况也很好办,那就是用模型包围盒的6个面去和检测区域的棱台几何(其实在世界坐标系下也是包围盒)的6个面去进行碰撞检测(不在本篇中论述),碰到即在检测区域内。
以上论述是对raycaster进行8叉树优化的理论描述,下面给出部分关键代码。
/* */ let Intersector = require('./Intersector'); let LineSegmentIntersection = require('./Intersection').LineSegmentIntersection; let Vec3 = require('./Vec3'); let Mat4 = require('./Mat4'); let Algorithm = require('./Algorithm'); let LineSegmentIntersector = function () { Intersector.call(this); //原始的起始点和临界值,初始化设置的数据,保留作为参照,设置后不再变动 this._orginStart = Vec3.new();//线段起点 this._orginEnd = Vec3.new();//线段终点 this._orginThreshold = 0.0;//点和线求相交时的临界值,完全相交是很难求到的 //临时存储,每次求交都可能会变动的数据 //对于有变换的几何求交,不会变换几何顶点而是变换起始点和临界值 this._start = Vec3.new();//线段起点 this._end = Vec3.new();//线段终点 this._threshold = 0.0;//点和线求相交时的临界值,完全相交是很难求到的 this._direction = Vec3.new(); this._length = 0; this._inverseLength = 0; this._matrix = Mat4.new(); }; LineSegmentIntersector.prototype = Object.create(Intersector.prototype); LineSegmentIntersector.prototype.constructor = LineSegmentIntersector; Object.assign(LineSegmentIntersector.prototype, { init: function (start, end, threshold) { Vec3.copy(this._orginStart, start); Vec3.copy(this._orginEnd, end); Vec3.copy(this._start, start); Vec3.copy(this._end, end); if (threshold !== undefined) { this._orginThreshold = threshold; this._threshold = threshold; } }, intersect: function (drawable) { //先使用包围盒子 if (!drawable.getBoundingBox().intersectLineSegment(this._orginStart, this._orginEnd)) { return; } this._drawable = drawable; let geometry = drawable.getGeometry(); let vertexbuffer = geometry.getBufferArray('Vertex'); this._vertices = vertexbuffer.getArrayBuffer(); //没有顶点数据不处理直接返回 if (!this._vertices) return; //没有图元不处理直接返回 let primitive = geometry.getPrimitive(); if (!primitive) return; //初始化求相交的各种数据 let matrix = drawable.getTransform(); if (this._transform !== matrix) {//如果不一样,需要计算新的起始点以及各种临时数据 this._transform = matrix; Mat4.invert(this._matrix, matrix); //根据矩阵计算新的临界值 if (this._orginThreshold > 0.0) { let tmp = this._start; Mat4.getScale(tmp, this._matrix); let x = tmp[0]; let y = tmp[1]; let z = tmp[2]; this._threshold = this._orginThreshold * (x > y ? (x > z ? x : z) : y > z ? y : z); } //根据矩阵计算新的起始点 Vec3.transformMat4(this._start, this._orginStart, this._matrix); Vec3.transformMat4(this._end, this._orginEnd, this._matrix); //根据新的起始点计算各种临时数据 Vec3.sub(this._direction, this._end, this._start); this._length = Vec3.length(this._direction);//长度 this._inverseLength = this._length <= Algorithm.EPSILON ? 0.0 : 1.0 / this._length; Vec3.scale(this._direction, this._direction, this._inverseLength);//求单位向量 }//如果变换与上次一样,直接使用上次的数据求相交 //求相交 primitive.operate(this); }, intersectPoint: function (vertex) { // https://www.geometrictools.com/GTEngine/Include/Mathematics/GteDistPointSegment.h //起点指向绘制点,向量M let m = Vec3.MemoryPool.alloc(); Vec3.sub(m, vertex, this._start); //起点指向终点,向量N let n = Vec3.MemoryPool.alloc(); Vec3.sub(n, this._end, this._start); //求M在N上的投影比例值 //|m|*|n|*cos / \n\*\n\ = |m|*cos/\n\ let r = Vec3.dot(m, n) * this._inverseLength * this._inverseLength; //计算绘制点到线段的距离 let sqrdist = 1.0; if (r < 0.0) {//夹角超过90度,绘制点在当前线段起点后面,求绘制点与起点的距离 sqrdist = Vec3.sqrLen(m); } else if (r > 1.0) {//绘制点在当前线段终点后面,求绘制点与终点的距离 sqrdist = Vec3.sqrDist(vertex, this._end); } else {//在0到1之间 //m - n * r 如果平行或者接近于平行,结果接近于0,相交 sqrdist = Vec3.sqrLen(Vec3.scaleAndAdd(m, m, n, -r)); } let intersection = undefined; if (sqrdist > this._threshold * this._threshold) {//超过了临界值,没有相交返回 } else { //相交 intersection = new LineSegmentIntersection(); //intersection._i1 = index; //intersection._r1 = 1.0; Vec3.scaleAndAdd(intersection._point, this._start, n, r); intersection._ratio = r; } Vec3.MemoryPool.free(m); Vec3.MemoryPool.free(n); return intersection; }, intersectLine: function (vertex0, vertex1) { // https://www.geometrictools.com/GTEngine/Samples/Geometrics/DistanceSegments3/DistanceSegments3.cpp //let epsilon = 0.00000001; //起点到终点的向量 let u = Vec3.MemoryPool.alloc(); Vec3.sub(u, vertex1, vertex0); let v = Vec3.MemoryPool.alloc(); Vec3.sub(v, this._end, this._start); let w = Vec3.MemoryPool.alloc(); Vec3.sub(w, vertex0, this._start); let a = Vec3.dot(u, u); let b = Vec3.dot(u, v); let c = Vec3.dot(v, v); let d = Vec3.dot(u, w); let e = Vec3.dot(v, w); let D = a * c - b * b; let sN; let tN; let sD = D; let tD = D; // compute the line parameters of the two closest points if (D < Algorithm.EPSILON) {//平行 // the lines are almost parallel sN = 0.0; // force using point P0 on segment S1 sD = 1.0; // to prevent possible division by 0.0 later tN = e; tD = c; } else { // get the closest points on the infinite lines sN = b * e - c * d; tN = a * e - b * d; if (sN < 0.0) { // sc < 0 => the s=0 edge is visible sN = 0.0; tN = e; tD = c; } else if (sN > sD) { // sc > 1 => the s=1 edge is visible sN = sD; tN = e + b; tD = c; } } if (tN < 0.0) { // tc < 0 => the t=0 edge is visible tN = 0.0; // recompute sc for this edge if (-d < 0.0) sN = 0.0; else if (-d > a) sN = sD; else { sN = -d; sD = a; } } else if (tN > tD) { // tc > 1 => the t=1 edge is visible tN = tD; // recompute sc for this edge if (-d + b < 0.0) sN = 0; else if (-d + b > a) sN = sD; else { sN = -d + b; sD = a; } } // finally do the division to get sc and tc let sc = Math.abs(sN) < Algorithm.EPSILON ? 0.0 : sN / sD; let tc = Math.abs(tN) < Algorithm.EPSILON ? 0.0 : tN / tD; // get the difference of the two closest points let closest0 = Vec3.MemoryPool.alloc(); let closest1 = Vec3.MemoryPool.alloc(); Vec3.scaleAndAdd(closest0, vertex0, u, sc); Vec3.scaleAndAdd(closest1, this._start, v, tc); let sqrDistance = Vec3.sqrDist(closest0, closest1); Vec3.MemoryPool.free(closest0); Vec3.MemoryPool.free(closest1); let intersection = undefined; if (sqrDistance > this._threshold * this._threshold) { } else { //相交 intersection = new LineSegmentIntersection(); // intersection._i1 = index0; // intersection._i2 = index1; // intersection._r1 = 1.0 - tc; // intersection._r2 = tc; Vec3.copy(intersection._point, closest1); intersection._ratio = tc; } Vec3.MemoryPool.free(u); Vec3.MemoryPool.free(v); Vec3.MemoryPool.free(w); return intersection; }, intersectTriangle: function (vertex0, vertex1, vertex2) { let e2 = Vec3.MemoryPool.alloc(); Vec3.sub(e2, vertex2, vertex0); let e1 = Vec3.MemoryPool.alloc(); Vec3.sub(e1, vertex1, vertex0); let pvec = Vec3.MemoryPool.alloc(); Vec3.cross(pvec, this._direction, e2); let intersection = undefined; //线段与三角面点积 let det = Vec3.dot(pvec, e1); //判断三角形所在的平面与线段是否平行,如果平行铁定不相交,面片没有厚度 if (Math.abs(det) < Algorithm.EPSILON) { //return undefined; }else{ let invDet = 1.0 / det; let tvec = Vec3.MemoryPool.alloc(); Vec3.sub(tvec, this._start, vertex0); let u = Vec3.dot(pvec, tvec) * invDet; //三角面超出了线段两个点范围外面,铁定不相交 if (u < 0.0 || u > 1.0) { //return undefined; }else{ let qvec = Vec3.MemoryPool.alloc(); Vec3.cross(qvec, tvec, e1); let v = Vec3.dot(qvec, this._direction) * invDet; // if (v < 0.0 || u + v > 1.0) { //return undefined; }else{ let t = Vec3.dot(qvec, e2) * invDet; if (t < Algorithm.EPSILON || t > this._length) { //return undefined; }else{ //相交 intersection = new LineSegmentIntersection(); //求相交点 let r0 = 1.0 - u - v; let r1 = u; let r2 = v; let r = t * this._inverseLength; let interX = vertex0[0] * r0 + vertex1[0] * r1 + vertex2[0] * r2; let interY = vertex0[1] * r0 + vertex1[1] * r1 + vertex2[1] * r2; let interZ = vertex0[2] * r0 + vertex1[2] * r1 + vertex2[2] * r2; // intersection._i1 = index0; // intersection._i2 = index1; // intersection._i3 = index2; // intersection._r1 = r0; // intersection._r2 = r1; // intersection._r3 = r2; //这里的点没有经过变换,不是真实的世界坐标点 Vec3.set(intersection._point, interX, interY, interZ); Vec3.transformMat4(intersection._point, intersection._point, this._transform); //求法向量,法向量未变换,如果有用途也要变换 let normal = intersection._normal; Vec3.cross(normal, e1, e2); Vec3.normalize(normal, normal); //比例,在相交线段上的比例,不需要变换 intersection._ratio = r; } } Vec3.MemoryPool.free(qvec); } Vec3.MemoryPool.free(tvec); } Vec3.MemoryPool.free(e1); Vec3.MemoryPool.free(e2); Vec3.MemoryPool.free(pvec); return intersection; // http://gamedev.stackexchange.com/questions/54505/negative-scale-in-matrix-4x4 // https://en.wikipedia.org/wiki/Determinant#Orientation_of_a_basis // you can't exactly extract scale of a matrix but the determinant will tell you // if the orientation is preserved //intersection._backface = mat4.determinant(intersection._matrix) * det < 0; }, intersectBoundingBox: function (box) { return box.intersectLineSegment(this._orginStart, this._orginEnd); }, }); module.exports = LineSegmentIntersector; // setDrawable: function (drawable) { // this._geometry = drawable.getGeometry(); // this._vertices = this._geometry.getBufferArray('Vertex'); // // let matrix = drawable.getTransform(); // if (this._transform === matrix) {//如果与上次的一样,不再处理 // return; // } // // //如果不一样,需要计算新的起始点已经各种临时数据 // this._transform = matrix; // Mat4.invert(this._matrix, matrix); // // //根据矩阵计算新的临界值 // if (this._orginThreshold > 0.0) { // let tmp = this._start; // Mat4.getScale(tmp, this._matrix); // let x = tmp[0]; // let y = tmp[1]; // let z = tmp[2]; // this._threshold = this._orginThreshold * (x > y ? (x > z ? x : z) : y > z ? y : z); // } // //根据矩阵计算新的起始点 // Vec3.transformMat4(this._start, this._orginStart, this._matrix); // Vec3.transformMat4(this._end, this._orginEnd, this._matrix); // // //根据新的起始点计算各种临时数据 // Vec3.sub(this._direction, this._end, this._start); // this._length = Vec3.length(this._direction);//长度 // this._inverseLength = this._length <= Algorithm.EPSILON ? 1.0 / this._length : 0.0; // Vec3.scale(this._direction, this._direction, this._inverseLength);//求单位向量 // }, // setGeometry: function (geometry, matrix) { // Intersector.prototype.setGeometry.call(this, geometry, matrix); // // //如果不一样,需要计算新的起始点已经各种临时数据 // Mat4.invert(this._matrix, matrix); // // //根据矩阵计算新的临界值 // if (this._orginThreshold > 0.0) { // let tmp = this._start; // Mat4.getScale(tmp, this._matrix); // let x = tmp[0]; // let y = tmp[1]; // let z = tmp[2]; // this._threshold = this._orginThreshold * (x > y ? (x > z ? x : z) : y > z ? y : z); // } // //根据矩阵计算新的起始点 // Vec3.transformMat4(this._start, this._orginStart, this._matrix); // Vec3.transformMat4(this._end, this._orginEnd, this._matrix); // // //根据新的起始点计算各种临时数据 // Vec3.sub(this._direction, this._end, this._start); // this._length = Vec3.length(this._direction);//长度 // this._inverseLength = this._length <= Algorithm.EPSILON ? 1.0 / this._length : 0.0; // Vec3.scale(this._direction, this._direction, this._inverseLength);//求单位向量 // }, // setGeometry: function (geometry) { // //没有顶点数据不处理直接返回 // let vertexbuffer = geometry.getBufferArray('Vertex'); // if(!vertexbuffer) return; // // //没有图元不处理直接返回 // let primitive = geometry.getPrimitive(); // if (primitive) // primitive.operate(this); // },
/* 相交遍历器,暂时摈弃 这里的遍历有局限性,遍历的是RenderNode级别的对象,无法知道哪些被场景剔除,除了隐藏以外 所以如果不需要考虑被剔除的对象,没必要使用此遍历器 */ let NodeVisitor = require('./NodeVisitor'); let Mat4 = require('./Mat4'); let IntersectVisitor = function () { NodeVisitor.call(this); this._intersector = undefined; this._matrixStack = [];//模型变换矩阵栈 this._matrixStack.push(Mat4.new()); }; IntersectVisitor.prototype = Object.create(NodeVisitor.prototype); IntersectVisitor.prototype.constructor = IntersectVisitor; Object.assign(IntersectVisitor.prototype, { setIntersector: function (i) { this._intersector = i; }, getIntersector: function () { return this._intersector; }, //重载 apply: function (node) { let TransformSetting = require('../core/TransformSetting'); let Geometry = require('../core/Geometry'); if(node instanceof TransformSetting){ this.applyTransform(node); }else if(node instanceof Geometry){ this.applyGeometry(node); }else{ this.traverse(node); } }, applyTransform: function(t) { if (!this._intersector.valid(g)) return; let m = Mat4.new(); Mat4.copy(m, this.getMatrix()); //TransformSetting的子类都包含该函数 t.computeLocalToWorldMatrix(m); this.pushMatrix(m); this.traverse(t); this.popMatrix(); }, applyGeometry: function (g) { if (!this._intersector.valid(g)) return; this._intersector.setGeometry(g, this.getMatrix()); this._intersector.intersect(g); }, getMatrix: function () { return this._matrixStack.back(); }, pushMatrix: function (m) { this._matrixStack.push(m); }, popMatrix: function () { this._matrixStack.pop(); }, }); module.exports = IntersectVisitor;
/* */ //let Primitives = require('../core/Primitives'); let Vec3 = require('./Vec3'); let Intersector = function () { //图元码,确定哪些图元需要求交,默认全都求 this._primitiveMask = Intersector.ALL_PRIMITIVES; // //this._intersectLimit = intersectionEnums.NO_LIMIT; //相交的结果 this._intersections = []; //临时数据 this._drawable = undefined; //this._geometry = undefined; this._vertices = undefined; this._transform = undefined;//上一次的变换,如果一样,不再处理 this._primitiveIndex = 0; }; // Intersector.NO_LIMIT = 0; // Intersector.LIMIT_ONE_PER_DRAWABLE = 1; // Intersector.LIMIT_ONE = 2; //PrimitiveMask Intersector.POINT_PRIMITIVES = 1 << 0; Intersector.LINE_PRIMITIVES = 1 << 1; Intersector.TRIANGLE_PRIMITIVES = 1 << 2; Intersector.ALL_PRIMITIVES = (1 << 0) | (1 << 1) | (1 << 2); let sortBackToFrontFunction = function (a, b) {//从大往小排序,从后向前 return b.getRatio() - a.getRatio(); }; let sortFrontToBackFunction = function (a, b) {//从小往大排序,从前向后 return a.getRatio() - b.getRatio(); }; Object.assign(Intersector.prototype, { reset: function() { //this._hit = false; this._drawable = undefined; this._vertices = undefined; this._primitiveIndex = 0; }, intersect: function (drawable) { // //没有顶点数据不处理直接返回 // if(!this._vertices) return; // // //没有图元不处理直接返回 // let primitive = this._geometry.getPrimitive(); // if (primitive) // primitive.operate(this); }, getIntersections: function () {//相交的结果集 this._intersections.sort(sortFrontToBackFunction); return this._intersections; }, operatePoint: function (index) { //if (this._limitOneIntersection && this._hit) return; if ((this._primitiveMask & Intersector.POINT_PRIMITIVES) === 0) return; let vertex = Vec3.MemoryPool.alloc(); let vertices = this._vertices; Vec3.set(vertex, vertices[3 * index], vertices[3 * index + 1], vertices[3 * index + 2]); let intersection = this.intersectPoint(vertex); Vec3.MemoryPool.free(vertex); if(intersection){ intersection._primitiveIndex = this._primitiveIndex; intersection._drawable = this._drawable; this._intersections.push(intersection); //this._hit = true; } this._primitiveIndex++; }, operateLine: function (index0, index1) { //if (this._limitOneIntersection && this._hit) return; if ((this._primitiveMask & Intersector.LINE_PRIMITIVES) === 0) return; let vertex0 = Vec3.MemoryPool.alloc(); let vertex1 = Vec3.MemoryPool.alloc(); let vertices = this._vertices; Vec3.set(vertex0, vertices[3 * index0], vertices[3 * index0 + 1], vertices[3 * index0 + 2]); Vec3.set(vertex1, vertices[3 * index1], vertices[3 * index1 + 1], vertices[3 * index1 + 2]); let intersection = this.intersectLine(vertex0, vertex1); Vec3.MemoryPool.free(vertex0); Vec3.MemoryPool.free(vertex1); if(intersection){ intersection._primitiveIndex = this._primitiveIndex; intersection._drawable = this._drawable; this._intersections.push(intersection); //this._hit = true; } this._primitiveIndex++; }, operateTriangle: function (index0, index1, index2) { //if (this._limitOneIntersection && this._hit) return; if ((this._primitiveMask & Intersector.TRIANGLE_PRIMITIVES) === 0) return; let vertex0 = Vec3.MemoryPool.alloc(); let vertex1 = Vec3.MemoryPool.alloc(); let vertex2 = Vec3.MemoryPool.alloc(); let vertices = this._vertices; Vec3.set(vertex0, vertices[3 * index0], vertices[3 * index0 + 1], vertices[3 * index0 + 2]); Vec3.set(vertex1, vertices[3 * index1], vertices[3 * index1 + 1], vertices[3 * index1 + 2]); Vec3.set(vertex2, vertices[3 * index2], vertices[3 * index2 + 1], vertices[3 * index2 + 2]); let intersection = this.intersectTriangle(vertex0, vertex1, vertex2); Vec3.MemoryPool.free(vertex0); Vec3.MemoryPool.free(vertex1); Vec3.MemoryPool.free(vertex2); if(intersection){ intersection._primitiveIndex = this._primitiveIndex; intersection._drawable = this._drawable; this._intersections.push(intersection); //this._hit = true; } this._primitiveIndex++; }, intersectPoint: function (/*v0, p0*/) { }, intersectLine: function (/*v0, v1, p0, p1*/) { }, intersectTriangle: function (/*v0, v1, v2, p0, p1, p2*/) { }, }); module.exports = Intersector; // setDrawable: function (drawable) { // this._drawable = drawable; // // let vertexbuffer = drawable.getGeometry().getBufferArray('Vertex'); // this._vertices = vertexbuffer.getArrayBuffer(); // // let matrix = drawable.getTransform(); // if (this._transform === matrix) {//如果与上次的一样,不再处理 // return; // } // // //如果不一样,需要计算新的起始点已经各种临时数据 // this._transform = matrix; // }, // setGeometry: function (geometry, matrix) { // this._geometry = geometry; // this._vertices = geometry.getBufferArray('Vertex'); // // if (this._transform === matrix) {//如果与上次的一样,不再处理 // return; // } // // //如果不一样,需要计算新的起始点已经各种临时数据 // this._transform = matrix; // },
/* 相交的结果 */ let Vec3 = require('./Vec3'); let Intersection = function () { this._drawable = undefined; this._primitiveIndex = undefined; }; Object.assign(Intersection.prototype, { getDrawable: function () { return this._drawable; }, }); let LineSegmentIntersection = function () { Intersection.call(this); this._ratio = 0.0; this._point = Vec3.new(); this._normal = Vec3.create(1, 0, 0);//相交点的法向量 }; LineSegmentIntersection.prototype = Object.create(Intersection.prototype); LineSegmentIntersection.prototype.constructor = LineSegmentIntersection; Object.assign(LineSegmentIntersection.prototype, { getRatio: function () { return this._ratio; }, getPoint: function () { return this._point; }, }); module.exports.Intersection = Intersection; module.exports.LineSegmentIntersection = LineSegmentIntersection;
好了,到今天为止对射线拾取raycaster的讨论就差不多都结束了,后续如有勘误会陆续补充,谢谢同学们的耐心阅读,再次感谢连俊,风哥的指导解惑,也谢谢群里各位大佬的不吝指正。我会继续努力学习,今天到这里告一段落,下周再见。
本文系 ccentry/葱烤河鲫鱼 原创,如需引用请注明出处:https://www.cnblogs.com/ccentry/p/10011730.html