实时调度
1.什么是实时系统?
○1指系统能够在限定的响应时间内提供所需水平的服务。
○2指计算的正确性不仅取决于程序的逻辑正确性,也取决于结果产生的时间,如果系统的时间约束条件得不到满足,将会发生系统出错。
实时任务:具有明确时间约束的计算任务,有软/硬,随机/周期性之分。
硬实时任务:必须满足任务对截止时间的要求
软实时任务:联系着一个截止时间,但不严格,可偶尔错过,不会对系统造成大的影响。
实时系统的任务往往带有某种程度的紧迫性,因而实时系统的调度有某些特殊要求。
为此引入适合的实时调度算法
为保证系统正常工作,调度应具备下列条件
2.实现实时调度的基本条件
1)提供必要的信息
为了实现实时调度,系统应向调度程序提供有关任务的下述信息:
就绪时间。该任务成为就绪状态的时间。
开始截止时间、完成截止时间。
处理时间。从开始执行到完成所需时间。
资源要求。任务执行时所需的一组资源。
优先级。根据任务性质赋予不同优先级。
2)系统处理能力足够强
处理能力不足可能会出现某些实时任务不能得到及时处理,导致难以预料的后果。
如:
系统中有M个周期性的硬实时任务,处理时间为Ci,周期时间表示为Pi,
单机系统中必须满足条件
一个系统,6个硬实时任务,周期都是50ms,每次处理时间10ms。根据公式,系统是不可调度的。10*6/50
- 提高系统处理能力的方法
增强单机系统的处理能力
采用多处理机系统
此情况下需满足∑( Ci / Pi )≤N,N为处理机数
3)采用抢占式调度机制
硬实时任务:广泛采用抢占机制。
小的实时系统:如能预知任务的开始截止时间,为简化调度程序和对任务调度时所花费的系统开销,可采用非抢占调度机制。
4)具有快速切换机制
- 对外部中断的快速响应能力。
利用快速硬件中断机构,可在紧迫的外部事件请求中及时响应。 - 快速的任务分派能力。
使系统中的运行功能单位适当的小,提高切换速度。类如线程的思想
3.实时调度算法的分类
根据实时任务的性质
硬实时调度算法
软实时调度算法
按调度方式
非抢占调度算法
抢占调度算法
根据调度时间不同
静态调度算法
动态调度算法
多处理机环境下
集中式调度
分布式调度
1)非抢占调度算法
该算法较简单,用于一些小型实时系统或要求不太严格的实时系统中,又可分为:
○1非抢占式轮转调度算法。常用于工业生产的群控系统中,要求不太严格。
○2非抢占式优先调度算法。要求相对严格,根据任务的优先级安排等待位置。可用于有一定要求的实时控制系统中。(精心设置可获得百ms级的响应时间)
2)抢占式调度算法
较严格的实时系统中(t约为数十ms),选择采用抢占式优先权调度算法。根据抢占发生时间可分为:
○1基于时钟:某高优先级任务到达后并不立即抢占,而等下一个时钟中断时抢占。
○2立即抢占:一旦出现外部中断,只要当前任务未处于临界区,就立即抢占处理机。
4.常用的几种实时调度算法
目前有许多实时调度算法,在常用的算法中简单介绍两种实时调度算法:
○1最早截止时间优先EDF(Earliest Deadline First)算法
根据任务的开始截止时间来确定任务的优先级。截止时间越早,其优先级越高。
系统保持一个实时任务就绪队列
队列按各任务截止时间的早晚排序
调度程序总是选择就绪队列中的第一个任务,分配处理机使之投入运行。
新任务产生时,是否等当前程序执行完:
抢占式/非抢占式
可能会使作业错过,但可适用于软实时系统
○2最低松弛度优先LLF(Least Laxity First)算法
根据任务紧急(或松弛)的程度,来确定任务的优先级。任务的紧急程度越高(松弛度值越小),优先级就越高。
松弛度= 截止完成时间 – 还需执行时间 - 当前时间
可理解为当前时刻到开始截止时刻间的差距,随着时间的推进,这个差值逐渐变小,任务越来越紧迫。
**多处理机系统中的调度
- 多处理器系统的类型
不同角度分类
1)紧密耦合MPS和松弛耦合MPS
2)对称MPS和非对称MPS - 进程分配方式
1)对称MPS中的进程分配方式
1.静态分配(Static Assignment)方式
2.动态分配(Dynamic Assignment)方式
2)非对称MPS中的进程分配方式
OS的核心部分驻留在一台主机上,而从机上只是用户程序,进程调度只由主机执行。主机中保持有一个就绪队列。
每当从机空闲时向主机发一索求进程信号,然后等待主机分配进程。 - 进程(线程)调度方式
自调度(Self-Scheduling)方式
成组调度(Gang Scheduling)方式
专用处理器(Dedicated Processor Assignment)分配方式
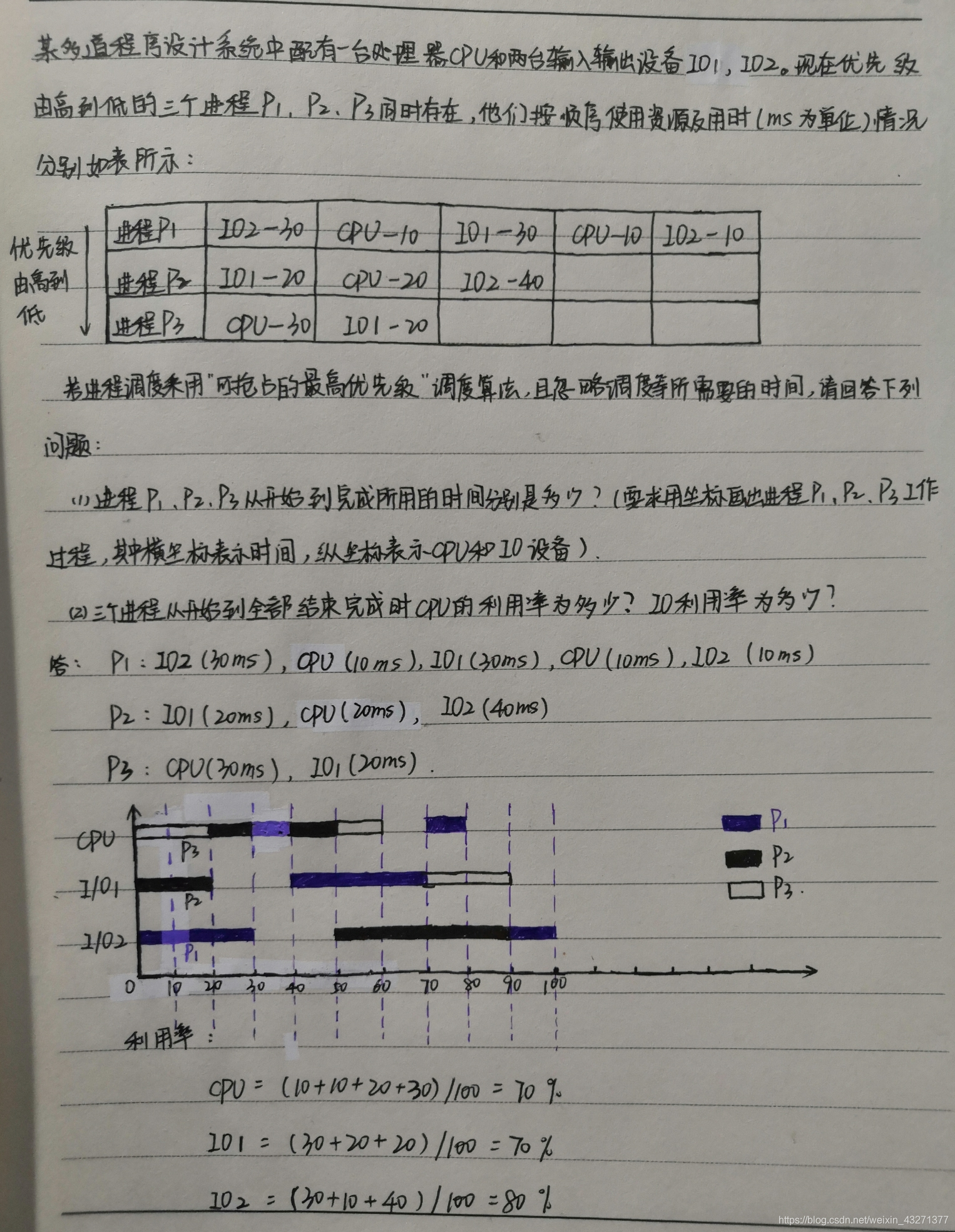
补充进程调度题目: