什么是复杂的混合道路交通环境?
在我国,复杂的混合交通所指的是机动车、非机动车、行人组成的混合交通,这种混合交通引发的交通拥堵、交通事故增加、城市环境不断恶化、运输效益下降等一系列问题,严重地影响了道路交通秩序,降低了道路通行能力,增加了道路交通管理难度。
众所周知,安全是混合交通中面临的最主要问题,而道路交通安全受到人-车-路以及交通环境这四位一体的因素影响。在研究智能汽车驾驶在复杂的混合交通环境中如何评估风险成为至关重要的问题。
在复杂的混合交通环境中如何评估风险?
众所周知,安全是混合交通中面临的最主要问题,对交通事故产生的交通特点分析可知,混合交通条件下发生的交通事故占总数的5.9%,同时还是主要的死亡原因(占67.2%);当混合交通且缺少交通控制时,造成的交通事故占总数的50.8%,死亡人数占62.4%(1998)。
因此,研究智能汽车驾驶在复杂的混合交通环境中如何评估风险成为至关重要的问题。
那么究竟如何来进行风险评估呢?首先我们来看看目前是怎样来做的?
现有的风险评价指标多样,优劣各异,如:
-
时间指标:TTC(Time to Collision)、THW(Time Headway)等
-
动力学指标:安全距离(避撞)、最小加速度(避撞)
-
统计学指标:碰撞概率(避撞、路径规划)、机器学习(决策)
-
势能场指标:势能场(能)、行车安全场(避撞、规划控制)
-
异常驾驶行为指标:超速、闯红灯,疲劳驾驶(驾驶行为分析)
| 各个风险评价指标的优劣比较 |
||
| 优势 |
劣势 |
|
| 时间指标 |
|
|
| 动力学指标 |
|
|
| 统计学指标 |
|
|
| 势能场指标 |
|
|
| 异常驾驶行为指标 |
|
|
问题的根源在哪里呢?
目前L2、L3自动驾驶技术开发相对程度,因为他们主要是针对某一个场景进行开发,比如追尾报警系统、主动避障系统、车道偏离预警系统等,根据具体的危险场景来开发,危险的场景和种类非常多,针对这样的问题,我们需要考虑,一个一个安全系统的叠加会造成什么样的问题?
这些系统在同一辆车上会不会存在冲突?
我们面临的挑战还有,我们面临这种风险的因素是复杂的,包括驾驶人、车辆、环境等各种因素,各种因素我们如何进行统一的评估?因为不同因素所产生的对安全的影响是不同的,针队这种问题,王建强此前在美国留学的时候就已经进行了深入思考,受到爱因斯坦同一场论的启发,借鉴了一种场的思想,因此就提出了自己的风险评估方法,基于场论的行车风险辨识方法,建立了人-车-路综合影响下的“行车安全场”统一模型。经过几年的研究完善,他们建立了一个完整的理论体系,这个体系目前接近成熟。这个风险评估的方法正在被用于智能车的决策与控制。
什么是安全场模型?
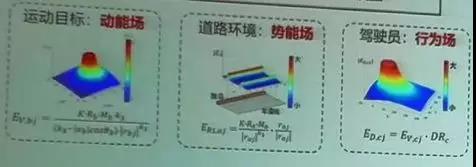
交通风险影响因素有哪些?产生的机理是否一样?显然,不同的因素影响是不一样的,为此我们把影响因素分成3种类别,一种是动态运动的目标,他所产生的风险,我们起了个名称叫动能场;而道路中环境的因素,静态的物体所产生的风险我们称之为势能场;另外重要的驾驶员行为所造成的风险我们称之为行为场;将这三种场进行统一成为“行车安全场”统一模型。
这些风险模型是如何建立的呢?
1、动能场
运动场为表征道路中其他运动目标对自车行车风险影响程度大小的“物理场”。
大小与运动物体的属性密切相关,比如说物体的运动的速度、类别、实际质量、运动的状态等等,我们把这些因素统一叫做“虚拟质量”,同时也收到道路影响因素的影响,如道路的曲率、坡度等。

动能场中心处的场强最强,因为在中心处,如果其他车辆一直重合必然会发生交通事故,动能场在物体前进的方向更集中表明潜在风险更大。
2、势能场

势能场为表征道路中静止物体,对自车行车风险影响程度大小的“物理场”。
势能场中心是静态目标所在的位置,势能场中心处场强最大,势能场场强随着物体距离减小而量指数式增加,势能场场强随着物体距离增大而减小,当距离增大到一定程度时场强不存在。
3、行为场

行为场为表征驾驶员风险因袭、车辆行为对行车风险影响程度大小的“物理场”。
驾驶员行为对自车行车造成的风险因素有很多如:驾驶员生理心理风险因素(疲劳驾驶、情绪驾驶)、认知风险因素(如错误估计车辆状态)、技能风险因素(如驾驶技能不高)、违规风险因素(如交通法规及时薄弱)。这些因素我们可以统一用驾驶员风险因子来表达,所产生的风险,是通过驾驶员驾驶车辆所产生的。
因此我们把动能场、势能场、行为场统一就建立了一个安全场统一模型,能够不对不同交通要素的影响进行规范评价,从而可以实现对整体交通环境的风险量化评估。

例如,图中红色车辆的风险为周边要素对它所形成的场力的合力所形成的,合力越大所产生的风险越大,场的物理的形态我们可以通过图的右侧图形看出来。
在复杂的混合交通环境中如何进行智能决策?
智能决策方法——学习人类的决策机制
形车风险评估是实现智能决策的前提,但智能车决策依然存在一系列难题:
① 现有的智能汽车决策算法真的智能吗?能够完全被驾驶人所接受吗?
② 现有的驾驶决策算法满足驾驶人的驾驶需求吗?
③ 驾驶人在驾驶过程中的决策只是与避免风险有关吗?
我们发现目前人类驾驶相比无人驾驶更能适应纷繁复杂的交通环境?因此,现在很有必要研究驾驶人类的驾驶决策机制。这里的研究并不是研究人脑决策机制,而是通过人类驾驶的行为的表现来研究驾驶员的行为决策机制。把决策机制的学习结果用于无人车的决策中,这是这里的研究思路。
人类驾驶行为遵循最小作用量原理
首先用16台数据采集车,行驶10万公里,采集了1500小时的有效人类自然驾驶行驶数据。用这组数据对车头时距(THW)、横向位置(D)和加速度(a)进行了一个统计分析,发现结果存在一种极值现象,即THW=1.5S,D=0m,a=0m/s,这种极值的启发意义是我们发现符合最小作用量原理。
物理学中通常利用小作用量原理来描述自然界中的极值现象。最小作用量原理是与对称性、守恒定律同等重要的最原始、最基本的概念,还是物理学中最具概括性的原理,是重大物理学问题的根源所在。
如果用S来代作用,这一原理可以简洁的表达为δS=0。今为止的所有物理规律,均可由它表达。

因此可以用最小作用量原理来阐释和描述人类的驾驶行为。
人类驾驶遵循的基本原则是“趋利避害”,“利”即追求安全和高效,“害”就是防止危险的发生。
进一步分析,横向加速度在追求安全的过程中为什么会存在极值?是因为人类驾驶其实是在追求安全与效率的一种平衡;纵向加速度从实际统计中的结果发现也符合一样的道理,极值是追求的平衡点,减速是为了保障安全,加速是为了追求高效。车头时距为什么能够保持在一个平衡范围内?因为车头时距过小就会存在一些潜在的危险,过大就会降低行车的效率。

通过这样的分析,驾驶员操控的行为为,不论在横向还是纵向上都在追求一种平衡的极值。
基于这样的分析,我们就可以用最小作用量来表征驾驶员的操作极值。
将作用量用物理模型表征方法如下:


上图中,小球的例子表示,如果力超过一定的限值,车辆就会失控,车辆就会飞出运动的轨迹,如果再约束的范围内车辆就可以顺利的到达目的地。
基于这样的物理模型,我们就可以用最小作用量原理来对车辆进行最佳的驾驶决策。
为验该思想,进行大量实验
自然驾驶数据分析结果
首先进行自然驾驶数据采集,在自然驾驶数据中提取了7631段帧号连续的跟车过程,通过计算各个过程的距离平均作用量,发现平均作用量分布较为集中,驾驶人的车过程中的决策行为趋于稳定。

实车实验

实验采用的是课题组的三调实验平台车,分别为:一辆本田雅阁车(作为车i)和两辆长安悦用车(作为车j和车k),实验分为自由行驶、跟车行驶和邻车切入三个场在昌平区水南路进行。
实车实验数据分析结果
绝大多数驾驶员都能控制在一个稳定值,实际上驾驶员的操作与理论值都有一些偏差,风险的判别就是看偏差的大小,如果超出一定的值危险就会发生。
按照19个作用量的大小来进行排序,发现另外一个现象,即为了分析驾驶人驾驶过程中的实际作用量S和理论的最小作用量S’之间的关系,我们计算S的均值和方差发现,S的均值越大,方差越大。当驾驶过程满足作用量为最小值S’时,方差为0。可以看到,因此,如果评价一个驾驶员的驾驶水平和驾驶技能,优秀的驾驶员可以用实际驾驶作用量与理论值的接近程度来衡量。
进一步的验证,可用KW验证方法,对六种行为过程的S与S’进行对比分析,结果显示所有过程中的P- valuel都远大于0.05,说明驾驶人在这六种行为过程中的实际作用量S与理论的最小作用量S’之间没有显着性差异。
在这个基础上用安全性和高效性的联合评价指标——Dse来判断行车的危险,实际作用量S和理论最小作用量S’之间的差异程度是影响写过程中安全性和高效性的关键因素。为了分析两者间的关系,定义Dse为行验过程中安全和高效的联合评价指标,并用归一化形式描述。
实车实验数据分析结果(跟车与切入场的加减速过程)
切入过程中的Dse高于跟车过程,制动过程中的Dse高于加速过程,且切入场中的制动过程Dse值最高(图d),说明切入场景的相较跟车场更复杂也更危险,制动过程相较加速过程更易出现行车风险。
通过实车实验数据证明:驾驶人的决策机制遵循最小作用量原理。因此在这样的理论之下,就可以把人类的决策行为用于智能车的决策当中。
基于最小作用量原理的决策方法
在感知的基础上基于场论进行风险评估,在评估风险的基础上,基于最小作用量原理来实现模拟人的智能决策。
风险评估方法既可以用于综合性的风险评、也可以用于路径的规划,而最小作用量可以用于复杂场景下的协同决策。
转载:https://mp.weixin.qq.com/s/uIsNBVnXXFVawtzRW7qlsA
来源智车科技