正题
我们今天讲一下线性规划,以这一道题为例:#179. 线性规划
首先面对一堆小于等于的约束,我们应该怎么做?
我们以样例来解释:
有四条约束,要同时满足:
同时,我们要使得最大。
首先,我们可以把可行解在一个二维平面上表示出来。
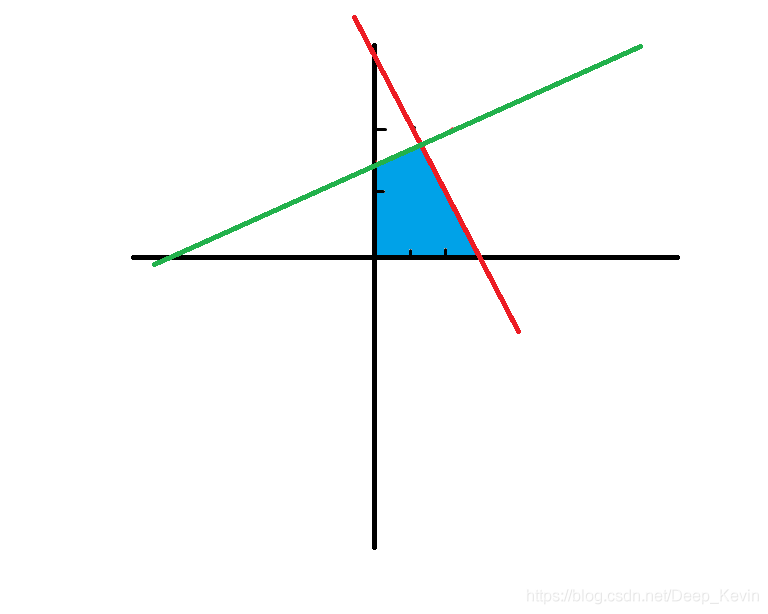
如图,可行解就是蓝色部分,我们要使得最大,那么我们就用一条
的直线,从上往下扫,然后,碰到的第一个点就是答案。
这就是图解法。如果有三个变量就是一个立体空间里面,用一个平面从上往下扫就可以了。但是4个变量的时候就难以构建了。
这就是单纯形的应用。
首先我们可以多设两个变量,把小于等于号去掉。

这个也是没有错的,对吧。
我们把答案也写进去,就变成了。
再变形一下,就变成:
当出现这样的,常数项是非负的,所有的等式右边的变量都是一样的,我们把它叫做基可行解形式。
左边的变量叫做基变量,右边的变量叫做非基变量。
在这个时候,我们构造一组答案是极其简单的,就是让右边的变量全部为0,然后左边的变量就等于右边的常数项,向上面的方程组,有一个显然的解就是。
这组解肯定是可行的,而且我们可以保证这组解一定在集合上的多边形的顶点上。(具体为什么请先继续往下看
我们考虑怎么将答案增大?
我们可以看到,是非基变量,也就是说,他现在取0.
但是他其实可以取到更大,那它到底能取到多大呢?
就要看下面的约束了,对于第一个约束,他最大能取到3(6/2),对于第二个约束,这个约束对是没有约束的,因为在第二个约束中,
不管取到多大,约束都是成立的。
那么我们只能选第一个约束。
那如果我们让为3,其他变量最好的情况就是取0。
所以,我们让作为基变量,让这个约束原来的基变量换做为非基变量。
显然这样子还不是基可行解形式,因为在两边都出现了。
那我们做一遍高斯消元就可以了!(意思就是把带进其他有
的地方。
就变成了
那我们就得到了一个更大的解。
回想一下,我们刚刚干了些什么?
首先,我们在答案里面,找出了一个系数大于0的非基变量,这个非基变量,我们把它叫做这一次操作的换入变量,接着,我们又找到一个对这个换入变量约束最紧的约束。将它与这条约束原来的基变量进行一个交换,我们把这个基变量叫做换出变量,这个交换叫做转轴。接着,我们用这个式子对每一个式子进行高斯消元。
我们就可以得到一组更大的解。当答案式子中非基变量都小于0了。我们就可以断定答案无法增大了。
如果我们找到了一个大于0的非基变量,但是我们找不到一个约束这个非基变量的约束(系数大于0)。
那么这个约束就可以无限增大,那么就是无最大解(Unbounded)的情况。
我们已经解决了如果有一个基可行解的时候,怎么去找到一个更优的解。
如果我们一开始没有一个基可行解呢?也就是说,如果我们一开始的约束不满足基可行解形式呢?
就像第二个样例:
是不满足基可行解的形式的。
存在一种解法,可以检验是否存在一个初始解。这个方法就是给每一条约束的右边都加上一个人工变量A,其中A大于等于0.
然后我们尽量使A小,也就是说当A=0时,才存在一个初始解。
因为给每一条约束右边都加上一个人工变量A就相当于,那么当A=0时,就是原来的约束。
显然,我们只要把答案设为-A就可以了,因为可以使得-A最大,从而使得A最小。
但是,现在还是不满足基可行解形式的,怎么办呢?
我们选出常数项最小的那一行。将那一行的A转轴成一个基变量。
像上面,我们选出第二个约束。
现在肯定可以保证所有的约束都满足基可行解形式了。
用单纯形算法来求出A的最小值(-A的最大值)就可以了。
若A=0,那么就有一个初始解,我们将原来的答案序列代入,如果存在一个变量是基变量,那么就先换成非基变量,最后得出第一组解。
若A不等于0,那么说明不存在第一组解,程序结束。
剩下的再交给单纯形算法就可以了。
这样的时间复杂度是很优秀的(随机情况下)。
但是代码量大,不容易实现。
有一种十分玄学的随机做法。
就是对于一个约束,如果常数项小于0,那么我们找到一个正系数的非基变量,将这个非基变量转轴,常数项就大于0了。
如果找不到正系数的非基变量,那么说明就不存在一个解,因为。
那么就很好的完美的解决这类的约束最值问题。
代码
如果真的要把每一条约束的左右两边的存下来,那无疑是非常麻烦的。
其实每一条约束都可以写成 其中S是一个常数。
那么我们就可以写成一个矩阵的形式。
每一行的基变量用一个数组存下来就可以了。
当我们要找一个换入变量的时候,我们还是在第0行找一个正系数的非基变量x。
但是在找一个换出变量的时候,我们要找一行,使得这一行的非基变量x大于0,而不是小于0的。因为相当于一个移项。
转轴,就相当于给这一行都除以这个非基变量。再给其他行做高斯消元。
注意,这个时候,第0行(答案行)的常数项是答案的相反数。
因为每一次转轴和高斯消元的过程,就变成了给答案减去一个数。
另外,我们注意到基变量的系数肯定为1,而非基变量只有n个,我们只要每行开n个空间,存下非基变量的系数就可以了。
id表示第i个非基变量存的是几号变量,id[n+i]表示第i行的基变量是几号变量。
uoj数据太恶心。97分过不了(其实没有人过得了
#include<cstdio>
#include<cstdlib>
#include<cstring>
#include<iostream>
using namespace std;
int n,m,t;
double a[30][25];
double eps=1e-5;
int id[45];
double ans[25];
void pivot(int x,int y){
swap(id[n+x],id[y]);
double temp=a[x][y];
for(int i=0;i<=n;i++) a[x][i]/=temp;
a[x][y]=1/temp;
for(int i=0;i<=m;i++) if(x!=i){
temp=a[i][y];a[i][y]=0;
for(int j=0;j<=n;j++) a[i][j]-=temp*a[x][j];
}
}
bool prepare(){
int x,y;
while(1){
x=y=0;
for(int i=1;i<=m;i++) if(a[i][0]<-eps) {x=i;if(rand()%3!=0) break;}
if(!x) break;
for(int i=1;i<=n;i++) if(a[x][i]<-eps) {y=i;if(rand()%3!=0)break;}
if(!y){
printf("Infeasible");
return false;
}
pivot(x,y);
}
return true;
}
bool simplex(){
int x,y;
double mmin;
while(1){
x=y=0;
for(int i=1;i<=n;i++) if(a[0][i]>eps) {y=i;break;}
if(!y) break;
mmin=(double)1e18;
for(int i=1;i<=m;i++) if(a[i][y]>eps && a[i][0]/a[i][y]<mmin) {x=i;mmin=a[i][0]/a[i][y];}
if(!x) {
printf("Unbounded");
return false;
}
pivot(x,y);
}
return true;
}
int main(){
srand(23333);
scanf("%d %d %d",&n,&m,&t);
for(int i=1;i<=n;i++) scanf("%lf",&a[0][i]);
for(int i=1;i<=m;i++){
for(int j=1;j<=n;j++) scanf("%lf",&a[i][j]);
scanf("%lf",&a[i][0]);
}
for(int i=1;i<=n;i++) id[i]=i;
if(prepare() && simplex()){
printf("%.8lf\n",-a[0][0]);
if(t){
for(int i=1;i<=m;i++) if(id[n+i]>=1)ans[id[n+i]]=a[i][0];
for(int i=1;i<=n;i++) printf("%.8lf ",ans[i]);
}
}
}关于对偶:
前面我们研究的问题都是“约束为小于等于,求最大值的问题”,然而现在要求解得问题是"约束为大于等于,求最小值的问题"。
首先符号不是问题,我们只要将两边同时乘上-1,就可以变号了。
最小值也不是问题,那我们在单纯形算法的时候,在答案式拿出一个系数为负的就可以了。
但是这样使得在找初始解的时候可能会变慢许多,所以,有人可以证明上面的两个问题是一个对偶问题,也就是答案相同。
那么怎么个对偶法呢?
对于标准型线性规划问题:
它的对偶问题是:
相关证明请翻阅算法导论。
其中A是一个系数矩阵,是A的转置。
表示的是第i行的A。
另外的,对于的任意一个n*n的矩阵行列式都为
,那么这个线性规划问题的最优解是整数。当然,还要求
都为整数矩阵。