文章目录
脉冲和连续波(CW)雷达
将波形类型作为雷达系统分类,可以分成两种雷达:脉冲和连续波(CW)雷达系统.连续波雷达是那些连续发射电磁能量的雷达.连续波形可以看成是
形式的纯正弦波.来自静止目标和杂波的雷达回波频谱将集中在
周围.一个移动目标回波的中心频率将移动
,也即多普勒频率.因此通过测量频率差,CW雷达以非常精确地提取目标径向速度.当然,连续波雷达需要对波形进行一些修正,毕竟没有调制,抗干扰能力也没那么强.CW雷达的主要用途是目标速度搜索和跟踪,以及导弹制导工作.
脉冲雷达使用一个脉冲波形串(一般带有调制).可以根据脉冲重复频率(PRF)将雷达系统分类为低重频,中重频,和高重频雷达.低重频雷达主要用于对目标速度不感兴趣时的距离测量;高重频雷达主要用于测量目标速度.
多普勒定律(效应):物体辐射的波长因为波源和观测者的相对运动而变化,在运动的波源前面,波被压缩,波长变短,频率上升;在运动的波源后面时,产生相反效应.
距离
下图是一个脉冲雷达的框图:

- 雷达同步器 雷达同步器提供所有时间戳,触发脉冲和切换门。利用发射器触发脉冲,它确定能量发射的起始点.
- 波形发生器 在现代雷达中,波形发生器在中频上产生复杂的传输信号。这还包括发射器脉冲的持续时间。在早期的简单脉冲雷达中,它作为脉冲形成网络被集成到调制器中.
- 调制器 在更现代的雷达中,调制器将发射器波形上变换为发射器的载波频率。在较旧的雷达中,它仅产生定长的高压脉冲作为自振荡发射管的阳极电压.
- 发射机 发射器产生雷达脉冲的能量。在高功率放大器中,更复杂的波形被提升到必要的功率。在自振荡高功率管(例如,在磁控管中)中产生简单的,内部未调制的(键控ON / OFF)脉冲。
- 双工器 双工器是发送 - 接收开关。它在发射脉冲期间将天线切换到发射器,并保护接收器免受高发射功率的过载。在接收时间内,它以尽可能小的损耗将回波信号发送到接收器。
- 灵敏时间控制 灵敏度时间控制是一种与时间相关的增益控制。在近距离范围内,回波信号非常强,因此只需要很小的增益。在远距离处,回波信号非常弱,必须将增益调节到最大。为了不使接收器饱和,必须尽早在高频范围内进行调节。在大多数情况下,集成了额外的限制器,以保护接收器中敏感的低噪声前置放大器级。
- 接收器 接收器将高频信号转换为较低的中频,这更容易处理。在该中频处,提供了回声信号的放大的基本部分。 为了获得尽可能好的动态,主要使用对数放大器。
- 雷达信号处理 雷达信号处理器仍然实时处理回波信号。它们已经可以在这里进行数字化,但仍然处于传输脉冲的固定时间背景中。这里,可以并行使用许多滤波器,仅使用这一个输出信号,其具有最大的信噪比。但是,为了进一步处理,必须转发所用过滤器的名称,因为这是目标标识中的重要指标.
- 雷达数据处理 雷达数据处理器仅处理回波信号的数字描述。由于不同长度的处理操作与发射机的起始脉冲没有固定的关系,因此这些数据不再是实时的。为此,数据集在处理开始时获得了时间戳,以便可以在正确的时间参考中显示数据。
- 雷达指示器 代表各种雷达视觉设备,这里将简单的示波器显示为模拟A示波器。线性X偏转按比例缩放到空间中电磁波的传播速度。传输脉冲也通过接收路径。这可以补偿示波器内部电路的时间延迟:运行时间(以及目标的距离)是从发射脉冲的前沿到所示回波信号的前沿测量的.
简单的来说,脉冲雷达的工作过程是这样的:雷达同步器产生整个系统所需要的同步定时信号(时间戳很重要!),波形发生器产生的波形经过调制后发送到天线,双工器控制发射模式和接收模式之间的天线转接,双工器可使用一副天线同时用于发射和接收.接收器接收到信号后进行放大.信号处理器进行目标信息的提取.目标距离R可以通过测量时间延迟
来计算,
是脉冲在雷达与目标之间往返所花费的时间.由于电磁波是以光速
传播,所以:
最后雷达指示器,简单的说就是计算机的显示界面(GUI),将所处理的数据呈现出来.
脉冲雷达发射和接受一串脉冲,我们称脉冲之间的周期为脉冲重复间隔(PRI),或者叫脉冲重复时间(PRT),其倒数就是脉冲重复频率(PRF),如下图所示:
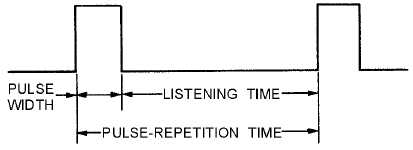
这里我们用
来表示雷达脉冲的宽度,即表示雷达仅发射能量
秒.在余下的PRT时间内等待回波.雷达发射占空因子
定义为比值
,则雷达的平均发射功率是:
式中,
表示雷达峰值发射功率.脉冲能量:
与往返时间延迟T对应的距离称为雷达的非模糊距离
.对于模糊距离,我们可以从下图这个例子来看,假设接收机接受到第一个回波,我们称为回波1,测得距离为400km,随后接收机接收到第二个回波,我们称为回波2,那么此时我们就需要考虑,这个回波是第一个脉冲检测到更远的目标反射回来的还是第二个脉冲反射回来的,如果是第一个脉冲,那么回波2的距离为500km,如果是第二个脉冲的反射波,那么回波2的距离为100km,因此,回波2就是带有距离模糊的.

从上面的分析可知,雷达一旦发射了脉冲就必须等待足够长的时间,以便能在下次脉冲发射前接收到最远距离目标的回波,即在第二个脉冲发射前接收到的回波肯定是当前发出去脉冲的回波,因此,最大的非模糊距离等于PRT的一半,即:
PRI:pulse repetition interval
PRF:pulse repetiton frequency
距离分辨率
距离分辨率(
)是雷达的一种量度,表示的是雷达分别探测出相邻目标的能力.雷达系统通常设置成在最小距离
和最大距离
之间工作.
和
之间的距离分为M个距离仓(门),每个宽度为KaTeX parse error: Expected 'EOF', got '\Delte' at position 1: \̲D̲e̲l̲t̲e̲ ̲R,
这个表达的意思是在距离至少为KaTeX parse error: Expected 'EOF', got '\Delat' at position 1: \̲D̲e̲l̲a̲t̲ ̲R的目标在距离上可以完全分辨出来,而在相同距离门之内的目标可以使用信号处理技术分辨出横向距离(方位角).考虑到两个目标
和
,分别对应的时间延迟为
和
.则距离差为:
现在考虑这个距离
的最小值,假设
和
之间的距离为
,考虑到脉冲前沿抵达目标2的时候,目标1的回波已经走了
的距离,因此,目标1和目标2的回波相差距离为
,这样在回波脉冲中,二者有一半是掺杂在一起的,这不是我们想要的;考虑另外一中情况,当二者之间的距离为
时,回波正好相差
的距离,正好将两个目标的回波分开,如下图所示,因此,
必须大于等于
,由于雷达的带宽B等于
,则:

通常情况下,为了提高雷达性能,雷达用户和设计者都在寻找将 做到最小的方法.如果获得良好的距离分辨率则必须减小脉冲宽度.但是,这样会降低平均发射功率,增加工作带宽.使用脉冲压缩技术可以在保持足够的平均发射功率的同时获得良好的距离分辨率.