Noise-aware training噪声感知训练
看论文的时候看到这种提高鲁棒性的方法,查了一下资料,比较有限,在这里做个记录。
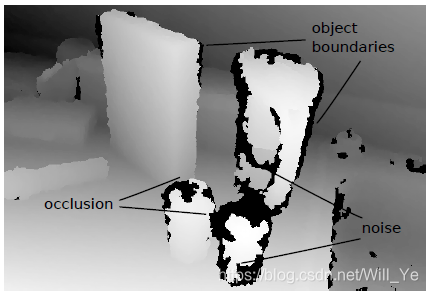
Noise-aware training噪声感知训练着眼于如何识别以及减少工作时的噪声,这里说的工作时也就是如处理图像深度信息的时候一样,在一些物体的边、角位置会有很多黑色的块状遮挡,这些都是噪点,如下图所示,缺失了这部分的深度信息。这种方法特别适合用在建筑或工业环境中,大部分的室内环境都挺适合的。
下面说一下大致的方法:
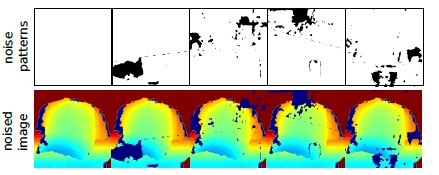
通过对噪音的深入观察,数据通常显示一种特征模式并出现在物体边界或物体表面。具体来讲,我们从一个经典的噪声模式数据集中采样 这些噪声模式发生在通过Kinect记录的典型室内场景。为了采样噪声模式,我们使用RGB-D SLAM数据集,首先,我们提取33000个大小为256×256的随机噪声,这些噪声来自不同位置的不同的序列(sequences)并把他们分成五组,根据缺失的深度信息读取它们包含的数量。这些噪声斑(noise patches)是二维二进制掩码形式,我们从两个不同的组中随机抽取一对噪声斑,对其进行随机添加或减少,并选择性地颠倒以产生最终的噪声遮掩模式(noise mask pattern)。我们重复这一过程直到我们收集到K=50,000个噪声模式。
产生的噪声模式示例以及其在训练示例中的应用如下图所示
利用人为制造的噪声模式对深度网络进行训练,然后将等式
中的目标最小化,其中每个深度样本
被随机替换为一个概率为50%的有噪变体(a noised variant)。以下是它的表示形式:
上式中,
指的是 哈马达乘积Hadamard product,
指的是 伯努利分布Bernoulli
distribution and
指的是 离散均匀分布discrete uniform distribution.
这个哈马达乘积其实就是两个m×n的矩阵,对应的元素相乘,重新组成一个m×n的矩阵。
伯努利分布就是0-1分布,按概率p来决定取值是1还是0
离散均匀分布就是随机变量有n个,它们的发生概率相等且等于
具体的应用例子可以看一下这篇论文: Multimodal Deep Learning for Robust RGB-D Object Recognition