- 定位:Where we are
- 感知:What we see
- 预测:How the environment will change
- 规划:How we move
- 控制:How to control the car
目录
1. 技术入门
无人车自定位系统是确定车辆自身的位置、姿态、各种速度加速度角速度、以及confidence


无人车定位的精度要求很高,所以会采取多种方式来对车辆进行定位
- 电子信号:GPS
- 轨迹推算:IMU(惯性导航单元)
- 环境特征匹配:lidar camera


但是各种传感器获得的信息有限
GPS定位
点云匹配定位

视觉定位

惯性导航推算轨迹

多传感器融合定位
我们可以将不同的传感器信息进行融合,进而融合不同传感器的优点来进行定位


2.基础知识——主要讲述各种坐标系
三维坐标系的几何变换
首先空间坐标系分为左右手坐标系

三维集合变换包括
二维旋转 三维旋转 三维平移 刚体位置与朝向等




常用坐标系
- ECI地心惯性坐标系(不随地球自转)
- ECEF地心地固坐标系(随地球自转 WGS84大地坐标系)
- 当地水平坐标系
- 通用墨卡托投影(UTM)




车体坐标系
车是一个刚体(刚体是指在运动中和受力作用后,形状和大小不变,而且内部各点的相对位置不变的物体。)
传感器随着车辆一起运动,相对位置不变

IMU坐标系

相机坐标系

激光雷达坐标系

坐标系集合

3.Apollo定位
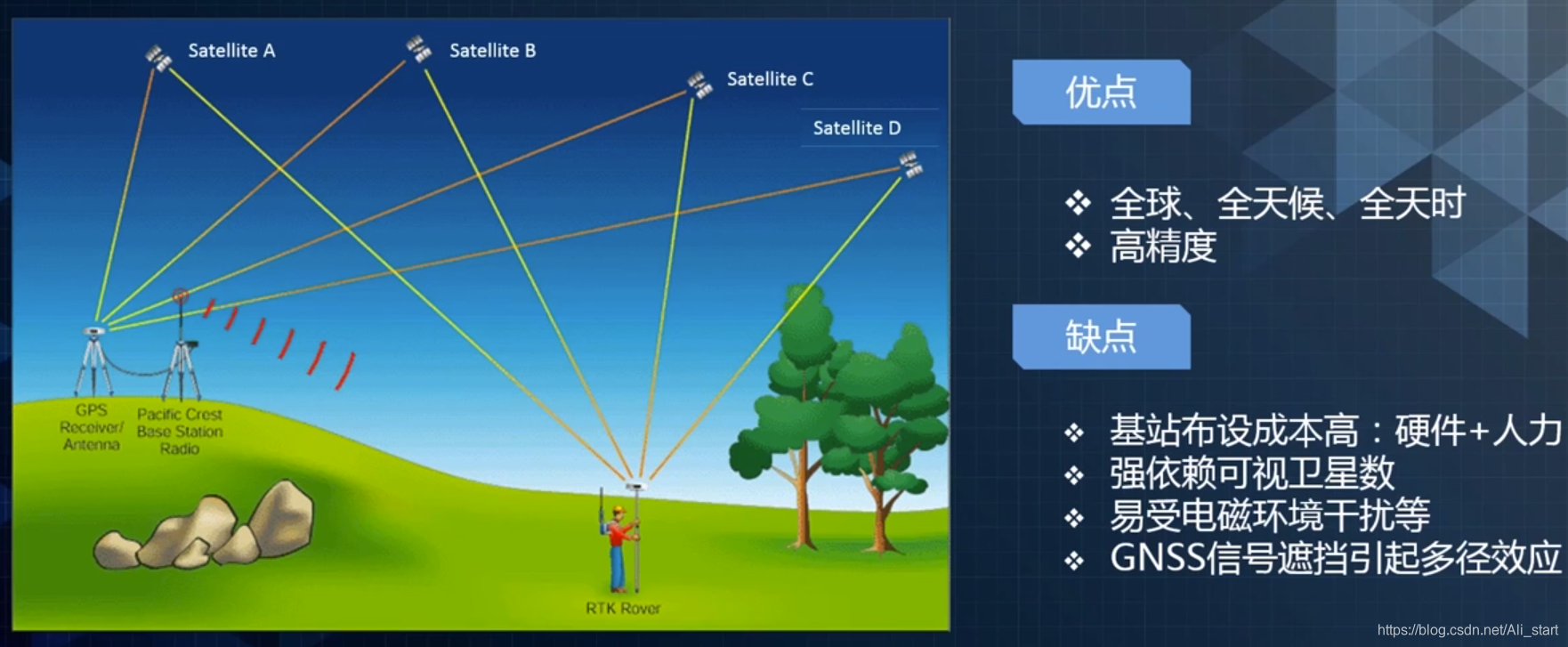
GPS定位
- 定位基本原理
- 主要误差
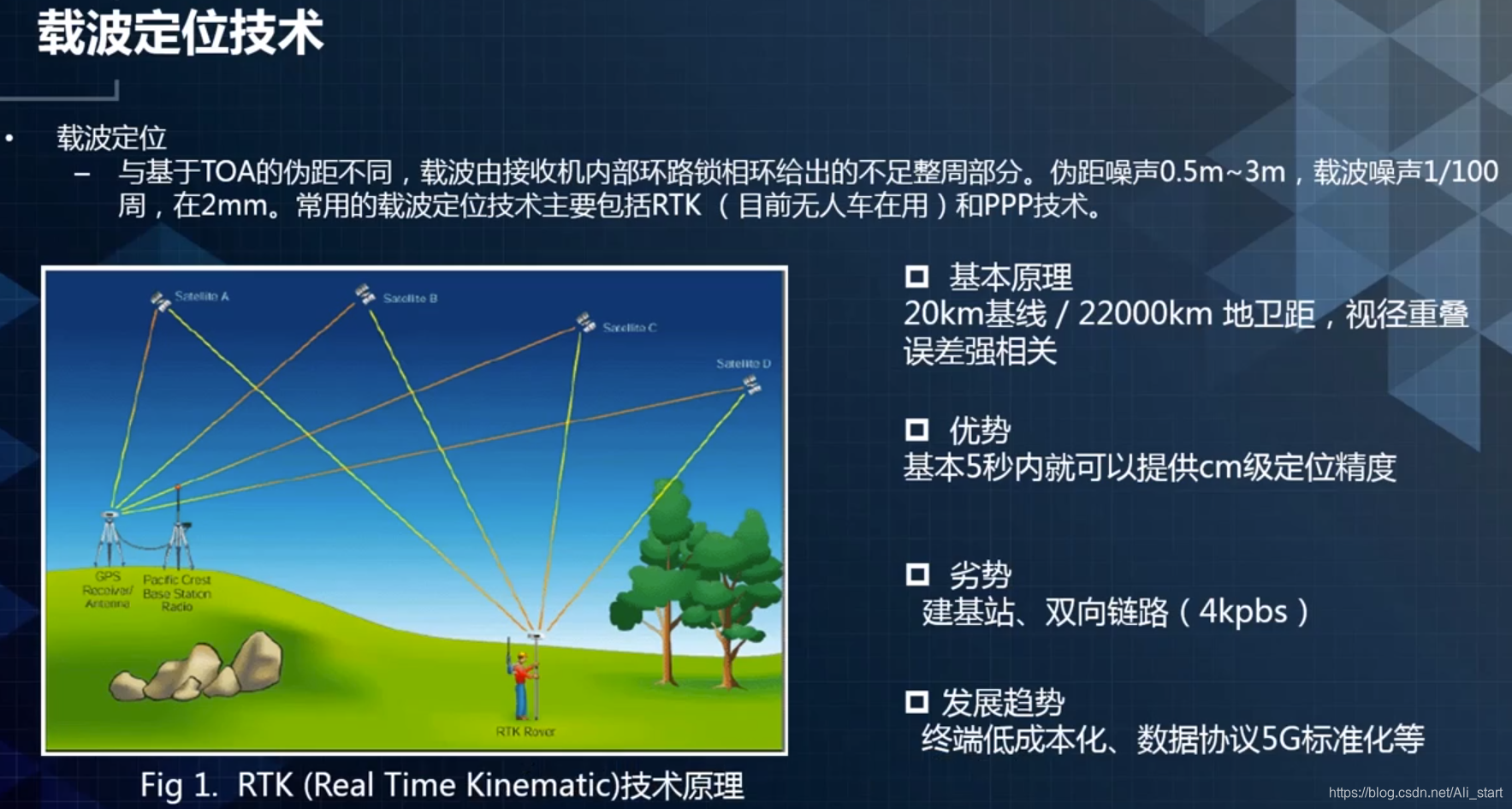
- 载波定位技术



点云定位技术方法





视觉定位

定位算法流程
