一、成像的本质
本质:将三维世界映射到二维平面上。
具体映射过程:
1、世界坐标系(Xw,Yw,Zw)到相机坐标系(Xc,Yc,Zc)
原理图:大白话,由于摄像机相对世界地平面的旋转和平移,成像会歪。

公式:

其中R为3*3的旋转矩阵,t为3*1的平移矢量,(xc,yc,zc,1)T为相机坐标系的齐次坐标,(xw,yw,zw,1)T为世界坐标系的齐次坐标。
2、相机坐标系(Xc,Yc,Zc)到图像坐标系(x,y)
原理:小孔成像,一点P与其图像点p之间的关系,P与相机光心o的连线为oP,oP与像面的交点p即为空间点P在图像平面上的投影。
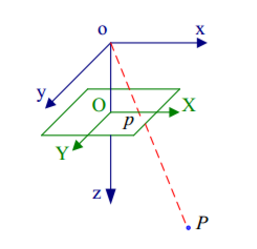
公式:

Zc为比例因子(不为0),f为有效焦距(光心到图像平面的距离)。
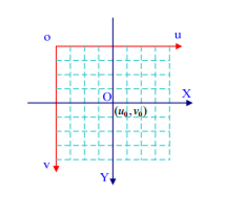
3、图像坐标系(x,y)到像素坐标系(u,v)
原理:像素坐标系uov是一个二维直角坐标系,反映了相机CCD/CMOS芯片中像素的排列情况。原点oo位于图像的左上角,u轴、v轴分别于像面的两边平行。像素坐标系中坐标轴的单位是像素(整数)。
像素坐标系不利于坐标变换,因此需要建立图像坐标系XOY,其坐标轴的单位通常为毫米(mm),原点是相机光轴与相面的交点(称为主点),即图像的中心点,X轴、Y轴分别与u轴、v轴平行。故两个坐标系实际是平移关系,即可以通过平移就可得到。
公式:

其中,dX、dY分别为像素在X、Y轴方向上的物理尺寸,u0,v0为主点(图像原点)坐标。
最终成像:世界坐标系(Xw,Yw,Zw)转换为像素坐标系(Xc,Yc,Zc)


其中,αx=f/dX、αy=f/dY,称为u、v轴的尺度因子,M1称为相机的内部参数矩阵,M2称为相机的外部参数矩阵,M称为投影矩阵。
二、参考
相机标定(Camera calibration)原理、步骤:https://blog.csdn.net/lql0716/article/details/71973318?locationNum=8&fps=1%EF%BC%89
最详细、最完整的相机标定讲解:https://blog.csdn.net/a083614/article/details/78579163