一、目标检测问题的定义
1、定义: 目标检测时图片中对可变数量的目标进行查找和分类。
2、需要解决的问题
- 目标种类与数量问
- 目标尺度问题:目标稠密、目标大小等
- 外在环境干扰问题:遮挡、光照
二、目标检测问题的方法
1、传统的目标检测方法到深度学习的目标检测方法
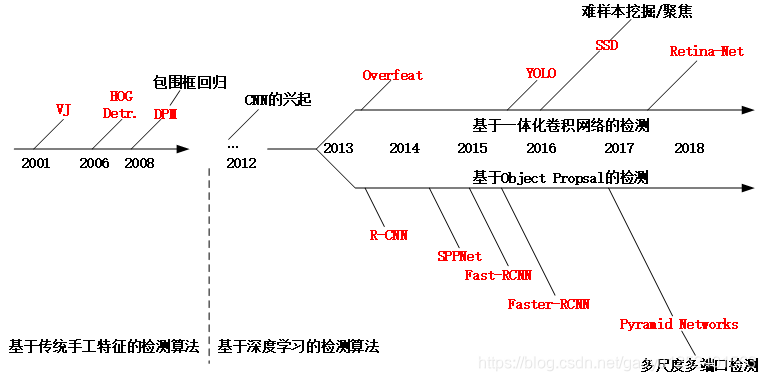
发展论述:
- 对于Overfeat、R-CNN方法,只是利用卷积神经网络进行特征提取,并没有改变搜索框提取目标区域的策略,算法的在速度上仍存在瓶颈。
- 随着Fast-RCNN的提出,通过RPN网络来代替原始的滑动窗口策略,标志着基于深度学习的目标检测方法,彻底完成了端到端的过程。使得速度和性能得到了很大的提升。
- 后来不用提取候选框的策略,采用直接回归目标框位置的策略,例如:YOLO、SSD网络,进一步提高了目标检测算法的速度。
2、列举一些代表性的传统的和基于深度学习的目标检测方法
- 传统的目标检测方法
- Viola-Jones:采用积分图特征+AdaBoost方法对人脸进行检测等。
- HOG+SVM:主要用于行人检测,通过对行人目标候选区域提取HOG特征,并结合SVM分类器来进行判定。
- DPM:是基于HOG特征检测的一种变种,不同的地方在于,DPM中会加入一些额外的策略,来提升检测的精度,而DPM方法是目前非深度学习方法,检测效果最好的,性能最优。在后续的深度学习方法中会用到很多DPM算法中提到的策略,例如包围框策略等。
- 深度学习的目标检测方法
- One-stage(YOLO和SSD系列的网络):直接回归出目标框的位置,即不用产生候选框,直接将目标边框定位的问题转化为回归问题。
- Two-stage(Faster RCNN系列的网络):利用RPN网络对候选区域进行推荐。
3、传统的和基于深度学习的目标检测方法对比
- 传统的目标检测方法
- 手动设计特征
- 滑动窗口
- 传统分类器
- 多步骤
- 准确度和实时性差
- 基于深度学习的目标检测方法
- 深度网络学习特征
- Proposal或者直接回归
- 深度网络
- 端到端
- 准确度高和实时性好
4、目标检测算法的流程(两种)
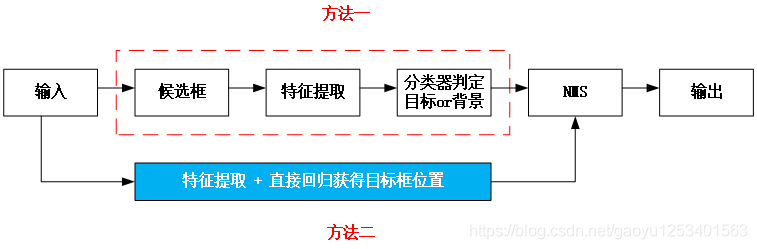
方法一:给定一幅图片作为输入,通过提取候选框的方法来对候选框进行特征提取,并且利用分类器进行判定,是属于目标或者背景,最后利用NMS(非极大值抑制算法)来进行候选框的合并,得到最终的目标检测结果。
方法二:直接采用特征提取和目标框回归的方法,来进行目标区域的提取,最后同样利用NMS的策略对目标框进行合并,最后输出目标检测的结果。
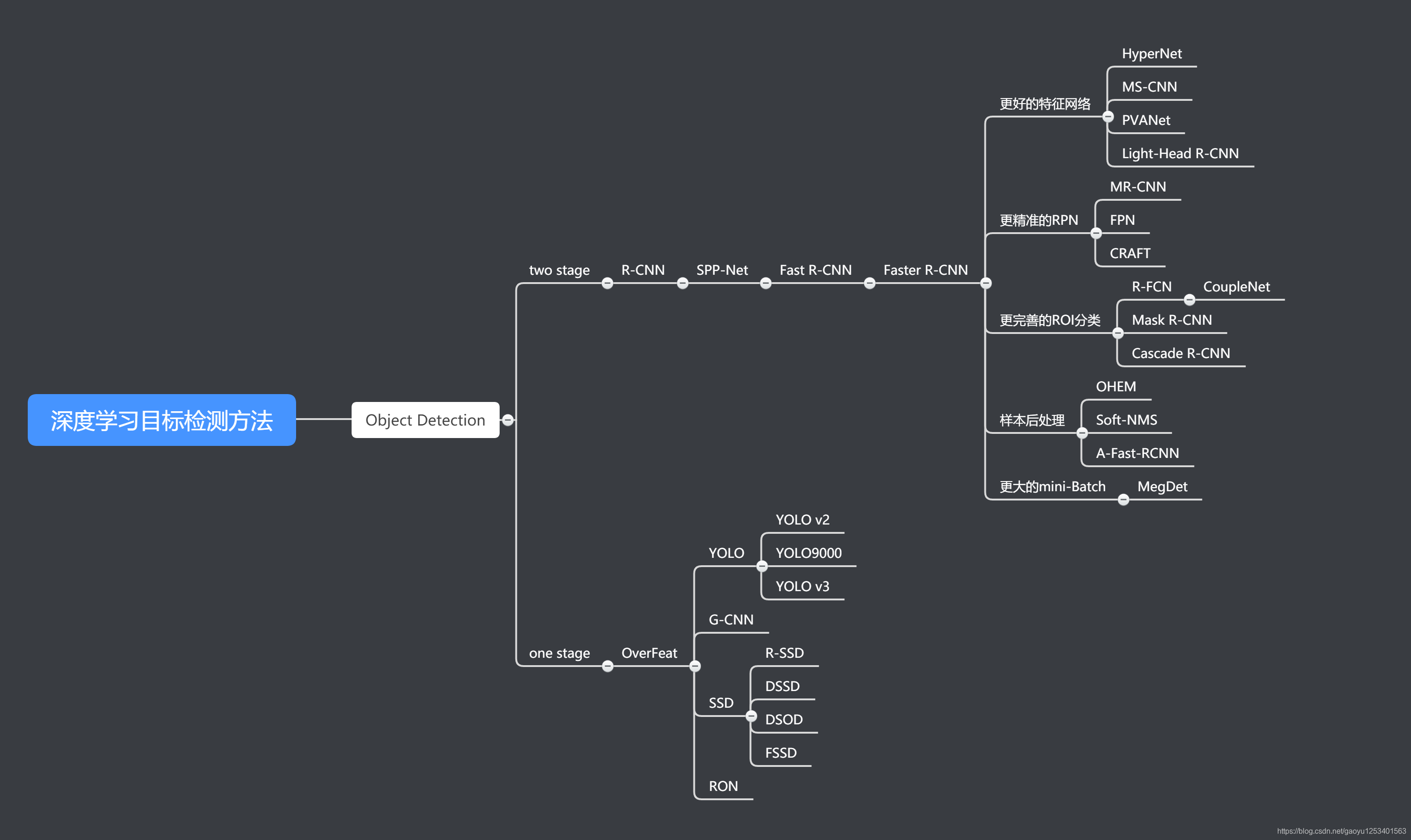
三、基于深度学习的目标检测方法
以下是目前常用的基于深度学习的目标检测方法