在过去的二十年中,电机控制设计的一个一致的趋势是使用基于算法的控制技术来部署无传感器电机,该技术比简单的标量控制同时提供更多的转矩、更大的效率和更好的精度。这需要高效的电机控制算法和由MCU执行的大量数字处理。
直到最近,控制复杂度本身已经成为一个挑战,设计工程师谁没有深厚的背景电机理论和算法。对于相对新手来说,使用估计器和观测器算法是很困难的,因为他们在现实世界中并没有很好地工作。
电机控制算法通常需要手动调节,整个实现过程涉及许多注意事项。由于学习曲线相当陡峭,设计往往需要几个月。然而,新的算法即将上线,这将重点转移到仅仅获得最佳性能和朝向耦合易用性与控制复杂度,同时没有关于最优性能的让步。
电动机基础
交流感应电动机(ACI)是住宅、商业和工业应用中的主要电机类型。它们在各种各样的应用中被发现,例如白色的货物、泵、风扇和冰箱的压缩机、暖通空调系统等等。
ACI电机是异步运行的,因为两个关键的机械部件-定子和转子-以不同的速度旋转。虽然ACIS提供了优良的速度和转矩控制,良好的效率和低成本,但它们需要复杂的反馈和控制机制来保持变速和低速的效率。
两种广泛使用的电机类型都采用同步操作。无刷直流电动机(BLDC)通过改变电流来控制定子磁通,而转子磁通通过永磁体或带电线圈保持恒定。无刷直流电动机使用设定的状态数来控制位置。使用的状态越多,就越能精确地控制位置。但是更多的州需要更复杂的处理。永磁同步电动机(PMSM)类似于无刷直流电动机,但采用连续控制方案,而不是离散状态。
两种控制系统应用广泛。简单的标量控件在新手设计师中很流行,因为它提供了简单的实现和低的处理需求。由于它的简单性,它可能是最流行的驱动ACI电机的方法。通过改变驱动电机的正弦波的频率来控制速度。
由于没有努力控制电流或优化转矩,标量控制在低速和高速时是低效的,并且提供了较差的动态性能。标量控制对变化作出反应是缓慢的,经常超过设定点,并且在低速度下具有高的内部功率损耗。
解决简单标量控制问题的复杂控制技术是面向场控制(FoC)。为了增加其复杂性,Foc通常提供成本节约、功率效率和更高的精度和性能。FAC也被称为矢量控制,它对ACI和PMSM电机的全转矩和速度范围提供最优控制。
图1将标量控制(有时称为赫兹控制的伏特)与某些关键操作参数的Foc进行比较。
标量控制与FoC的比较表
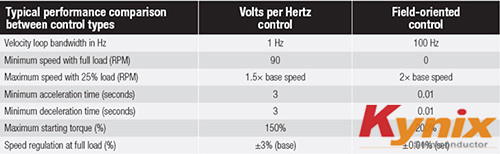
图1:场定向控制(Foc)提供全转矩和速度范围的完全控制,同时快速响应设定点或负载的变化。
Foc增加起动转矩并有效地支持在所有速度下的最大扭矩。它的性能在整个电机速度范围内是稳定的。由于Foc是电流控制的,开发人员可以优化电源逆变器电路以及电机尺寸到特定的应用。
无传感器操作
FOC控制的许多性能优势是由于使用反馈环来调节速度、位置/角度、电流、磁通和转矩。FOC需要测量转速和转子与定子之间的夹角。利用反馈也有助于复杂性。
开发人员可以用传感器或无传感器方法向控制系统提供反馈。传感器增加了系统的成本和组件-从而经常产生可靠性问题-但它们经常需要在高精度系统中。对于ACI电机应用,转速计通常用于测量速度。基于PMSM的设计可以使用编码器或旋转变压器来跟踪位置,同时通过测量位置随时间的变化来计算速度。
无传感器控制采用软件方法,通过使用“状态观测器”算法,如滑动模式和模型参考自适应系统(MRAS),基于实时电流和电压测量来建模电机的速度和角度。电流传感器和电压传感器比位置传感器便宜得多(电流可以使用单个直流分流器来廉价和可靠地测量),但是从系统微控制器需要一个健康数量的MIPS来实现数学马达模型。
由于工业和白色家电电机消耗这么多电,效率是最重要的设计目标之一。在电机功率非常低的功率端,节能在电池供电的应用中同样重要。例如,Foc可以延长四旋翼直升机的电池寿命20%。为了优化效率,开发人员需要自适应地最大化转矩,同时最小化产生转矩的电流。
更好的聚焦实现
德克萨斯仪器的SITSPIN电机控制解决方案是一种创新的方法,提供高效,精确的电机控制,甚至新手设计师容易访问。
心脏的SITSPIN产品是他们的快速算法,其特征在于电机控制电路,并为解决方案的三个其他组件创建基础:
SITSPIN FOC保证定子磁场相对于转子磁场的精确对准,以最大限度地提高转矩产生能力,使定子磁场的电流控制精确,并允许对电机进行适当的设计和尺寸调整。
SistaSin运动建立在StasSPIN FoC上,添加SPANTAC,以提供跨系统的动态速度、位置和负载范围的鲁棒控制。
SITSPIN BLDC是以低成本BLDC应用为目标的无传感器控制技术。它不需要任何电机参数的知识和工作与一个单一的调谐值。
TI不发布关于它的SITSPAIN解决方案如何消除手动调整(和优化性能)的技术细节,但有一种技术被认为类似于音频系统中的回声消除。
图2中的框图显示了快速算法的输入和输出。仅需要三个输入(电机相电流和电压和母线电压)。输出是磁通、相角、速度和转矩。
德克萨斯仪器图像快速算法
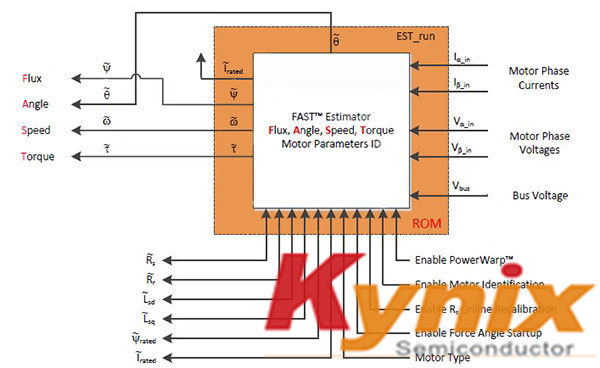
图2:快速算法利用了所有使用磁通的电机之间的相似性。
通过消除特定电机的异常信号,电机从控制角度变得更接近于理想电路。只有少数转子的旋转是必要的充分表征它。TI称目前正在解决的一个限制是,电机必须旋转以便快速运行,并且SITSPASPIN软件工作。这意味着,对于电机经常处于静止状态的位置控制应用,该解决方案目前不可行。
为了进一步维护其知识产权,算法和Simistin代码驻留在MCU ROM中。库调用是由TI提供的开发工具包提供的。ROIP意味着只有TI的C2000 Piccolo家族中的特定MCU可以实现SITSPAIN解决方案。
虽然SITSPASIN将电机控制方面引入更多工程师的舒适区,但这不是一个完整的解决方案。设计者还必须编写状态机代码和通信接口代码。
用于电机控制的调谐MCU
具有智能电机控制的MCU成本低,但能提供令人印象深刻的性能。例如,单个TI PICCOLO MCU可以控制两个电机,并且还执行高功率特征,例如功率因数校正(PFC)。为了管理这一点,MCU集成了包括以下内容的片上外围设备:
加速器:基于硬件的处理卸载主MCU,加速计算并简化总体设计。例如,控制律加速器(CLA)能够完全卸载整个闭环聚焦系统的处理。除了产生更精确的电机控制外,加速器还增加了加工余量,允许开发人员通过抽象简化设计,实现更先进的算法和/或更低成本的MCU规格。
电机控制专用外设:高分辨率和同步ADC使MCU同步ADC采样与CPU提取以执行低延迟的精确电流测量。可编程的基于硬件的PWMS通过确保ADC采样与PWM开关不一致来优化性能和效率。集成接口简化了设计,消除了部件,降低了成本。
实时调试支持:电机控制应用程序需要调试,同时继续服务中断而不停止电机。基于硬件的实时调试电路使开发人员能够直接和非侵入地访问内部微控制器资源。基于硬件的调试对于部署到该领域的系统进行故障排除也是有用的。
具有快速ROM的三个C2000 PICCOLO子家族是:高性能、90 MHz、浮点2806x族,这一家族以其高功率范围为特征,包括TMS32 F28068 FPZT;中级2805X系列;以及低成本2802X,包括TMS32 F28027 FPTQ。
四个开发工具包可用于支持Foc SuthSPIN解决方案,并且,重要的是,访问ROM中的IP。每一个都包括一个控制卡、驱动程序和软件。一般来说,它们针对不同功率规格和范围的电动机。BooSTXL插电式电机控制逆变器(BooStX-DRV8301)是一个廉价的评估平台;DRV8301-69M是一个60伏、40个连续的三相逆变器平台;DRV8312—69M成套工具是用于三相无刷直流(BLDC)和无刷交流(BLA)的电机控制评估套件。C)-或永磁同步(PMSM)-电动机;高压电机控制工具箱(TMDSHVMTRIN SPIN)是用于高压电机的数字控制的开发平台(110-240 VAC或直接DC总线输入50-350V)。
结论
尽管大多数发动机运行效率不高,但电动汽车每天消耗的电力占世界范围的很大一部分。FoC技术不仅优化效率,而且性能和精度,已经提供了二十年,但直到最近,大多数工程师不能充分利用它,因为陡峭的学习曲线。新产品进入市场,使得复杂的电机控制解决方案更容易使用。诸如TI的快速算法可以通过观察转子的几个旋转所产生的电流和电压来表征电机。使用该算法产生的电路模型,分析软件可以减少开发时间从几个月到短短几天。电机效率可以提高10%到20%,并且改进的精度和性能也受到工程师设计具有越来越高性能目标的系统的欢迎。