版权声明:涉猎过的知识都像是不断汇入大海的涓涓细流,你怎么知道是哪条汇入的溪流让海洋成为海洋呢【转载请注明出处】 https://blog.csdn.net/panda1234lee/article/details/52825113
OpenCV 实现
话不多说,附上C++代码
cv::Mat L0Smoothing(cv::Mat &im8uc3, double lambda = 2e-2, double kappa = 2.0) {
// convert the image to double format
int row = im8uc3.rows, col = im8uc3.cols;
cv::Mat S;
im8uc3.convertTo(S, CV_64FC3, 1. / 255.);
// 2*2 的卷积核
cv::Mat fx(1, 2, CV_64FC1);
cv::Mat fy(2, 1, CV_64FC1);
fx.at<double>(0) = 1; fx.at<double>(1) = -1;
fy.at<double>(0) = 1; fy.at<double>(1) = -1;
// 把一个空间点扩散函数转换为频谱面的光学传递函数
cv::Size sizeI2D = im8uc3.size();
cv::Mat otfFx = psf2otf(fx, sizeI2D);
cv::Mat otfFy = psf2otf(fy, sizeI2D);
// FNormin1 = fft2(S);
cv::Mat FNormin1[3]; // 注意:DFT以后,FNormal为两个通道
cv::Mat single_channel[3];
cv::split(S, single_channel); // 分裂为三个通道
for (int k = 0; k < 3; k++) {
// 离散傅里叶变换,指定输出复数格式(默认是CCS格式)
cv::dft(single_channel[k], FNormin1[k], cv::DFT_COMPLEX_OUTPUT);
}
// F(∂x)∗F(∂x)+F(∂y)∗F(∂y);
cv::Mat Denormin2(row, col, CV_64FC1);
for (int i = 0; i < row; i++) {
for (int j = 0; j < col; j++) {
cv::Vec2d &c1 = otfFx.at<cv::Vec2d>(i, j);
cv::Vec2d &c2 = otfFy.at<cv::Vec2d>(i, j);
// 0: Real, 1: Image
Denormin2.at<double>(i, j) = sqr(c1[0]) + sqr(c1[1]) + sqr(c2[0]) + sqr(c2[1]);
}
}
double beta = 2.0*lambda;
double betamax = 1e5;
while (beta < betamax) {
// F(1)+β(F(∂x)∗F(∂x)+F(∂y)∗F(∂y))
cv::Mat Denormin = 1.0 + beta*Denormin2;
// h-v subproblem
// 三个通道的 ∂S/∂x ∂S/∂y
cv::Mat dx[3], dy[3];
for (int k = 0; k < 3; k++) {
cv::Mat shifted_x = single_channel[k].clone();
circshift(shifted_x, 0, -1);
dx[k] = shifted_x - single_channel[k];
cv::Mat shifted_y = single_channel[k].clone();
circshift(shifted_y, -1, 0);
dy[k] = shifted_y - single_channel[k];
}
for (int i = 0; i < row; i++) {
for (int j = 0; j < col; j++) {
// (∂S/∂x)^2 + (∂S/∂y)^2
double val =
sqr(dx[0].at<double>(i, j)) + sqr(dy[0].at<double>(i, j)) +
sqr(dx[1].at<double>(i, j)) + sqr(dy[1].at<double>(i, j)) +
sqr(dx[2].at<double>(i, j)) + sqr(dy[2].at<double>(i, j));
// (∂S/∂x)^2 + (∂S/∂y)^2 < λ/β
if (val < lambda / beta) {
dx[0].at<double>(i, j) = dx[1].at<double>(i, j) = dx[2].at<double>(i, j) = 0.0;
dy[0].at<double>(i, j) = dy[1].at<double>(i, j) = dy[2].at<double>(i, j) = 0.0;
}
}
}
// S subproblem
for (int k = 0; k < 3; k++) {
// 二阶导
cv::Mat shift_dx = dx[k].clone();
circshift(shift_dx, 0, 1);
cv::Mat ddx = shift_dx - dx[k];
cv::Mat shift_dy = dy[k].clone();
circshift(shift_dy, 1, 0);
cv::Mat ddy = shift_dy - dy[k];
cv::Mat Normin2 = ddx + ddy;
cv::Mat FNormin2;
// 离散傅里叶变换,指定输出复数格式(默认是CCS格式)
cv::dft(Normin2, FNormin2, cv::DFT_COMPLEX_OUTPUT);
// F(g)+β(F(∂x)∗F(h)+F(∂y)∗F(v))
cv::Mat FS = FNormin1[k] + beta*FNormin2;
// 论文的公式(8):F^-1括号中的内容
for (int i = 0; i < row; i++) {
for (int j = 0; j < col; j++) {
FS.at<cv::Vec2d>(i, j)[0] /= Denormin.at<double>(i, j);
FS.at<cv::Vec2d>(i, j)[1] /= Denormin.at<double>(i, j);
//std::cout<< FS.at<cv::Vec2d>(i, j)[0] / Denormin.at<double>(i, j) <<std::endl;
}
}
// 论文的公式(8):傅里叶逆变换
cv::Mat ifft;
cv::idft(FS, ifft, cv::DFT_SCALE | cv::DFT_COMPLEX_OUTPUT);
for (int i = 0; i < row; i++) {
for (int j = 0; j < col; j++) {
single_channel[k].at<double>(i, j) = ifft.at<cv::Vec2d>(i, j)[0];
//std::cout<< ifft.at<cv::Vec2d>(i, j)[0] <<std::endl;
}
}
}
beta *= kappa;
std::cout << '.';
}
cv::merge(single_channel, 3, S);
return S;
}
// 矩阵的循环平移
void circshift(cv::Mat &A, int shift_row, int shift_col)
{
int row = A.rows, col = A.cols;
// 考虑负数和超出边界值的情况
shift_row = (row + (shift_row % row)) % row;
shift_col = (col + (shift_col % col)) % col;
printf("shift_row = %d, shift_col = %d\n", shift_row, shift_col);
cv::Mat temp = A.clone();
if (shift_row)
{
// temp[row - shift_row, row][*] -> A[0, shift_row][*]
temp.rowRange(row - shift_row, row).copyTo(A.rowRange(0, shift_row)); // 上移 row - shift_row 个像素距离(移动 shift_row 个像素)
// temp[0, row - shift_row][*] -> A[shift_row, row][*]
temp.rowRange(0, row - shift_row).copyTo(A.rowRange(shift_row, row)); // 将原来的上部(row - shift_row 个像素)下移 shift_row 个像素距离
}
if (shift_col)
{
temp.colRange(col - shift_col, col).copyTo(A.colRange(0, shift_col)); // 左移
temp.colRange(0, col - shift_col).copyTo(A.colRange(shift_col, col)); // 将原来的左部右移
}
return;
}
/*
% PSF2OTF Convert point-spread function to optical transfer function.
% OTF = PSF2OTF(PSF) computes the Fast Fourier Transform (FFT) of the
% point-spread function (PSF) array and creates the optical transfer
% function (OTF) array that is not influenced by the PSF off-centering. By
% default, the OTF array is the same size as the PSF array.
%
% PSF2OTF 将点扩展函数转换为光传输函数。OTF = PSF2OTF(PSF) 计算点扩展函数 (PSF) 数组的快速傅里叶变换 (FFT),
% 创建不受 PSF 偏离中心影响的光传输函数(OTF)阵列。默认情况下,OTF 数组的大小与 PSF 数组相同。
% OTF = PSF2OTF(PSF,OUTSIZE) converts the PSF array into an OTF array of
% specified size OUTSIZE. The OUTSIZE cannot be smaller than the PSF
% array size in any dimension.
%
% OTF = PSF2OTF(PSF,OUTSIZE )将 PSF 数组转换为指定 OUTSIZE 大小的 OTF 数组。在任何维度上, OUTSIZE 都不能小于 PSF 数组的大小。
% To ensure that the OTF is not altered due to PSF off-centering, PSF2OTF
% post-pads the PSF array (down or to the right) with zeros to match
% dimensions specified in OUTSIZE, then circularly shifts the values of
% the PSF array up (or to the left) until the central pixel reaches (1,1)
% position.
% 确保 OTF 不会因为 PSF 的偏离中心所改变,PSF2OTF 会向 PSF 数组后向填充 0 (向下或向右)来匹配指定的 OUTSIZE 的大小。
% 然后循环移位 PSF 数组的值(向左或向上)直到中央像素达到 (1,1) 的位置。
% Note that this function is used in image convolution/deconvolution
% when the operations involve the FFT.
%
% 注意,当涉及 FFT 操作时,此函数用于图像卷积/去卷积。
*/
cv::Mat psf2otf(const cv::Mat &psf, const cv::Size &outSize)
{
cv::Size psfSize = psf.size();
cv::Mat new_psf = cv::Mat(outSize, CV_64FC2);// outSize 指定的大小,而且是两个通道, psf 只有一个通道
new_psf.setTo(0);
// 只赋值到第一个通道
for (int i = 0; i < psfSize.height; i++)
{
for (int j = 0; j < psfSize.width; j++)
{
new_psf.at<cv::Vec2d>(i, j)[0] = psf.at<double>(i, j); // (0, 0) (0, 1)/(1, 0)
}
}
// std::cout <<
//-1*int(floor(psfSize.height*0.5)) <<
//", " <<
//-1*int(floor(psfSize.width*0.5)) <<
//std::endl;
// 循环平移矩阵(将矩阵中心移动到左上角)
circshift(new_psf, -1 * int(floor(psfSize.height * .5f)), -1 * int(floor(psfSize.width * .5f))); // (0, -1) (-1, 0)
cv::Mat otf;
// 离散傅里叶变换,指定输出复数格式(默认是CCS格式)
cv::dft(new_psf, otf, cv::DFT_COMPLEX_OUTPUT);
return otf;
}
效果图:

原图大小是640x640

内存是ddr4 2133MHZ
注意:
1.circshift, psf2otf 函数
circshift 的作用是循环平移矩阵;
psf2otf 的作用是将卷积核的中心移动到左上角,然后再进行FFT/DFT变换;
详细的psf2otf、circshift的解释
2. 二次规划问题:即问题的目标函数是二次函数
延伸阅读: P和NP问题的通俗解释
OpenCV 3.x.x的扩展模块(ximgproc. Extended Image Processing)
该模块也提供了 l0smooth 的API

附:在Windows下编译扩展OpenCV 3.1.0 + opencv_contrib ,值得注意的是,在编译OpenCV310源码时,opencv_aruco 模块的源码有bug,需要将
calibrateCamera(processedObjectPoints, processedImagePoints, imageSize, _cameraMatrix,
_distCoeffs, _rvecs, _tvecs, _stdDeviationsIntrinsics, _stdDeviationsExtrinsics,
_perViewErrors, flags, criteria);
修改为
calibrateCamera(processedObjectPoints, processedImagePoints, imageSize, _cameraMatrix,
_distCoeffs, _rvecs, _tvecs, /*_stdDeviationsIntrinsics, _stdDeviationsExtrinsics,
_perViewErrors,*/ flags, criteria);main函数代码:
cv::Mat src = cv::imread("D:/Pictures/beard.jpg", 1);
cv::Mat dst;
int64 begin = cvGetTickCount();
cv::ximgproc::l0Smooth(src, dst, 0.01, 2.);
int64 end = cvGetTickCount();
float time = (end - begin) / (cvGetTickFrequency() * 1000.);
printf("time = %fms\n", time);
imshow("l0Smooth", dst);
cv::waitKey(0);
效果如下:
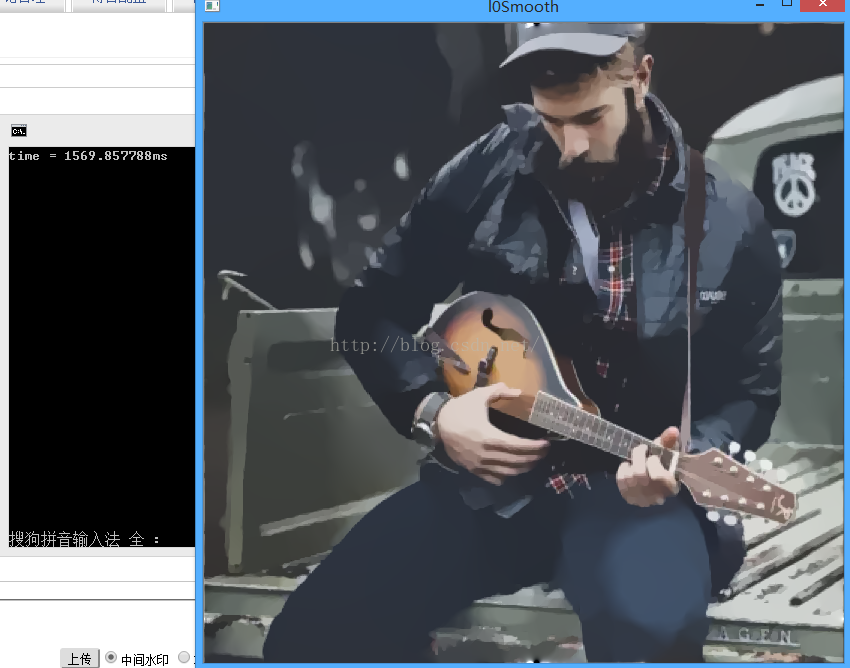
时间只有第一个方法的一半不到!
CUDA 实现
我自己实现了一个基于 CUDA 的版本(Github 上实现的是错误的),处理一张640*640的图片,仅需要 447 ms (迭代相同次数的情况下)
