背景介绍
一、玻尔兹曼机
玻尔兹曼机简单地说就是一个马尔科夫随机场(Markov Random Field),即一个无向图模型。但是玻尔兹曼机比无向图模型还是多了一些东西,就是玻尔兹曼机将其中的节点分为两类,一类是 hidden nodes,另一类是 visible nodes。
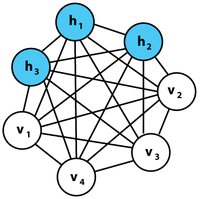
如上图所示,就是一个玻尔兹曼机,其中蓝色的是 hidden nodes,白色的是 visible nodes。
对于一个无向图模型来说,最重要的就是因子分解(Hammersley Clifferd Theorem):(基于最大团的概念)
P(x)=z1i=1∏Kψi(xci)s.t.ψ>0K表示最大团的个数ci表示最大团xci表示最大团对应的随机变量集合ψi(xci)是势函数z是归一化因子
一般取ψ为指数函数,即可保证大于0ψi(xci)=exp{−E(xci)}P(x)=z1i=1∏Kψi(xci)=z1i=1∏Ke−E(xci)=z1e−∑i=1KE(xci)
其中E是能量函数(Energy function),能量越大越不稳定,就有从该状态变为稳定状态(能量低的状态)的趋势。
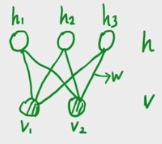
二、限制性玻尔兹曼机
对玻尔兹曼机进行了简化,hidden 节点与 visible 节点之间有连接,但是 hidden 节点与 hidden 节点之间,以及 visible 与 visible 节点之间没有连接。