PnP 问题即 Perspective-n-Point,最近一个星期被坑了两次,第一次被坑之后,因为忙,没有时间复盘,所以被坑了第二次。
我希望把 SLAM 问题中基础理论都归纳到统一的框架下,但我总是纠结 PnP 问题中三维点坐标是齐次的还是非齐次的,这样搞得很头疼。
在我的框架下已经有 Homography 矩阵和 Fundamental 矩阵,我是按照 MVG 这书的 DLT 方法计算 Homography 矩阵的,而 Fundamental 矩阵在 MVG 书上的推导比较晦涩,难懂。我是按照多年前看 Daniel Cremers 教授课程的方法推导的,具体的方法写在了以前的博客 【多视图几何】TUM 课程 第5章 双视图重建:线性方法 中。
现在我就是想把 PnP 问题归类到这两类方法中。
以下就用图片表示吧(有空再补上,嗯哼,“有空”,?_?)。
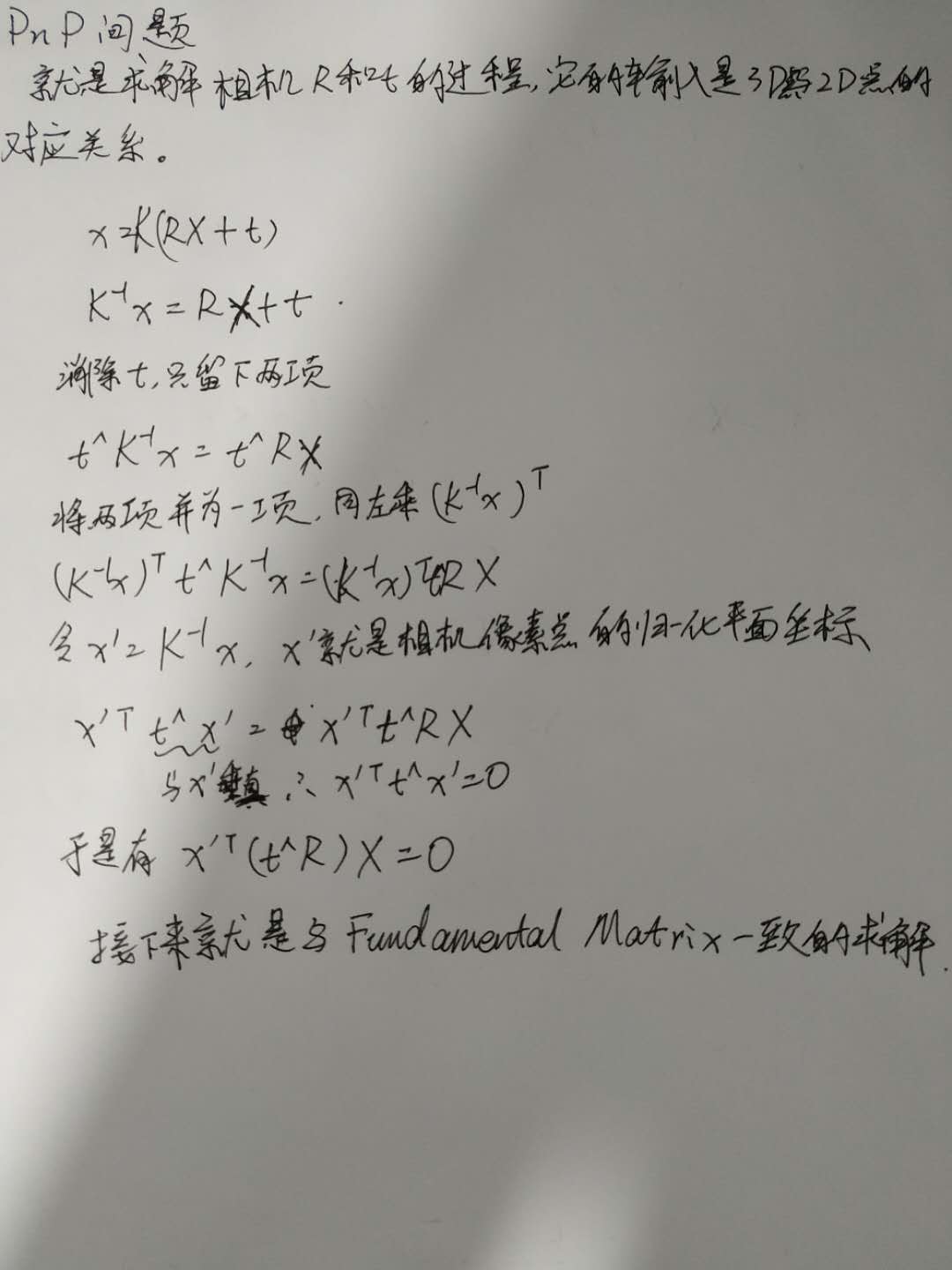
\(\mathbf{K}^{-1}\mathbf{x} = \mathbf{R}\mathbf{X} + \mathbf{t}\) 这一处转换是不对的,因为明显这个公式缺少了深度,这是因为 \(\mathbf{x}\) 本是一个齐次坐标,加上深度 \(\lambda\) 就 OK 了。