版权声明:本文为博主夏日辉的原创文章,未经博主允许不得转载。 https://blog.csdn.net/shanpenghui/article/details/89022664
因为在开发过程中,roscore可能需要在设备上开启,那么电脑就会把ROS_MASTER_URI设置成设备的IP地址,但是有时候需要在自己的电脑上进行开发和仿真,需要把ROS_MASTER_URI改成自己的电脑,这个时候就需要修改bashrc和hosts了
- 修改~/.bashrc文件,把设备的ROS_MASTER_URI注释掉;
sudo gedit ~/.bashrc
- 修改/etc/hosts文件,把设备的ROS_MASTER_URI注释掉;
sudo gedit /etc/hosts
-
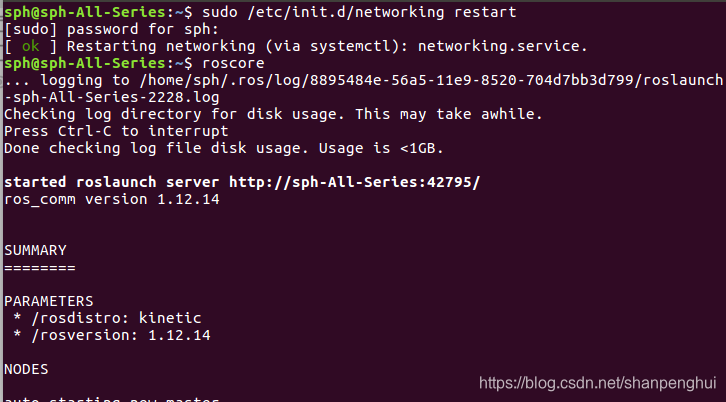
这个时候你启动roscore会发现出现下面提示:

-
这个原因是因为没有让hosts文件修改生效导致的。(修改完bashrc之后当然要source ~/.bashrc让修改生效啦)就可以这么做:
sudo /etc/init.d/networking restart
在启动就没有问题啦:
- 但是启动
rosparam set /test_optim_node/enable_homotopy_class_planning False
这个指令的时候显示:ERROR: Unable to communicate with master!

- 原因是ROS_MASTER_URI还是没有在当前终端正确识别,解决办法是:
在允许该指令的当前终端里面输入:
export ROS_MASTER_URI=http://sph-All-series:11311/
这个名称要在运行roscore之后的显示信息里面看,如第四项里面的图片。
- 继续编程啦。