原文地址:
https://www.cnblogs.com/pinard/p/9463815.html
-----------------------------------------------------------------------------------------------
在强化学习(二)马尔科夫决策过程(MDP)中,我们讨论了用马尔科夫假设来简化强化学习模型的复杂度,这一篇我们在马尔科夫假设和贝尔曼方程的基础上讨论使用动态规划(Dynamic Programming, DP)来求解强化学习的问题。
动态规划这一篇对应Sutton书的第四章和UCL强化学习课程的第三讲。

1. 动态规划和强化学习问题的联系
对于动态规划,相信大家都很熟悉,很多使用算法的地方都会用到。就算是机器学习相关的算法,使用动态规划的也很多,比如之前讲到的隐马尔科夫模型HMM(二)前向后向算法评估观察序列概率,隐马尔科夫模型HMM(四)维特比算法解码隐藏状态序列, 都是动态规划的典型例子。
动态规划的关键点有两个:一是问题的最优解可以由若干小问题的最优解构成,即通过寻找子问题的最优解来得到问题的最优解。第二是可以找到子问题状态之间的递推关系,通过较小的子问题状态递推出较大的子问题的状态。而强化学习的问题恰好是满足这两个条件的。
我们先看看强化学习的两个基本问题。

那么如何找到动态规划和强化学习这两个问题的关系呢?
回忆一下上一篇强化学习(二)马尔科夫决策过程(MDP)中状态价值函数的贝尔曼方程:

从这个式子我们可以看出,我们可以定义出子问题求解每个状态的状态价值函数,同时这个式子又是一个递推的式子, 意味着利用它,我们可以使用上一个迭代周期内的状态价值来计算更新当前迭代周期某状态ssSSS的状态价值。可见,使用动态规划来求解强化学习问题是比较自然的。
2. 策略评估求解预测问题
首先,我们来看如何使用动态规划来求解强化学习的预测问题,即求解给定策略的状态价值函数的问题。这个问题的求解过程我们通常叫做策略评估(Policy Evaluation)。
策略评估的基本思路是从任意一个状态价值函数开始,依据给定的策略,结合贝尔曼期望方程、状态转移概率和奖励同步迭代更新状态价值函数,直至其收敛,得到该策略下最终的状态价值函数。

下面我们用一个具体的例子来说明策略评估的过程。
3. 策略评估求解实例

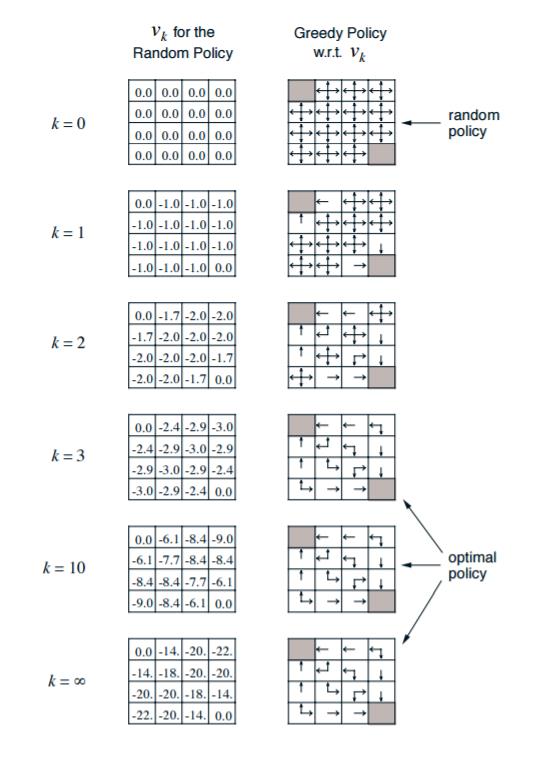

可以看到,动态规划的策略评估计算过程并不复杂,但是如果我们的问题是一个非常复杂的模型的话,这个计算量还是非常大的。
4. 策略迭代求解控制问题
上面我们将了使用策略评估求解控制问题,现在我们再来看如何使用动态规划求解强化学习的第二个问题控制问题。一种可行的方法就是根据我们之前基于任意一个给定策略评估得到的状态价值来及时调整我们的动作策略,这个方法我们叫做策略迭代(Policy Iteration)。
如何调整呢?最简单的方法就是贪婪法。考虑一种如下的贪婪策略:个体在某个状态下选择的行为是其能够到达后续所有可能的状态中状态价值最大的那个状态。还是以第三节的例子为例,如上面的图右边。当我们计算出最终的状态价值后,我们发现,第二行第一个格子周围的价值分别是0,-18,-20,此时我们用贪婪法,则我们调整行动策略为向状态价值为0的方向移动,而不是随机移动。也就是图中箭头向上。而此时第二行第二个格子周围的价值分别是-14,-14,-20, -20。那么我们整行动策略为向状态价值为-14的方向移动,也就是图中的向左向上。
如果用一副图来表示策略迭代的过程的话,如下图:
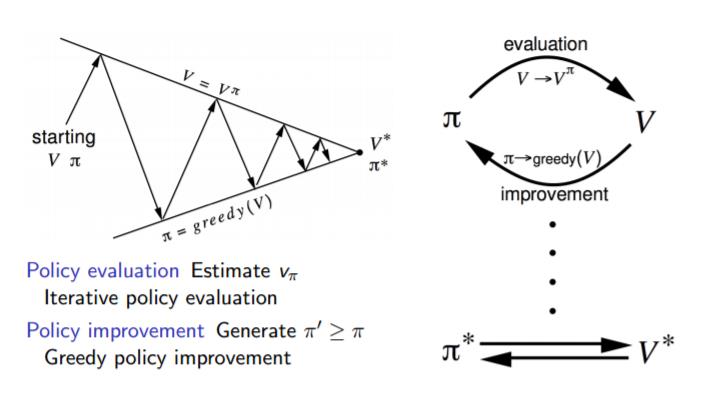

5. 价值迭代求解控制问题
