我所理解的卡尔曼滤波——公式推导与应用
1.什么是卡尔曼滤波
先举个例子说一下什么是卡尔曼滤波。
假如有一个小机器人可以在草地上自由的运动。为了让它实现导航,机器人需要知道自己所处的位置。那么这个小机器人如何才能知道自己在什么位置呢?有两种方式:
- 根据起始位置及自身的运动进行运动学计算,从而得到自身的位置信息。
- 根据自身携带的传感器测量自身的位置信息,如GPS。
那么,现在就存在一个问题。不论是根据运动学计算还是利用传感器信息,得到的位置信息都不可避免的存在误差。那机器人到底该相信哪个数据呢?有或者,如何根据这两种数据来确定自身的位置呢?最简单的方式就是取平均值,但是这种方式合理吗?凭什么每一项的权重都是0.5?显然这种方式不合适。
既然,取均值的方式不合理,那又该怎么做呢?卡尔曼滤波解决的就是这个问题!
卡尔曼滤波的本质就是根据”测量值”(如GPS数据) 和 “预测量”(如运动学计算结果) 及 “误差”,计算得到当前状态的最优量。
2.卡尔曼滤波的数学推导
2.1 状态方程和测量方程
首先假设我们知道一个线性系统的状态差分方程为 其中 是系统的状态向量,大小为n*1列。 为转换矩阵,大小为 。 为系统输入,大小为 。 是将输入转换为状态的矩阵,大小为 。随机变量 为系统噪声。
这里说句题外话,什么是状态方程?说的通俗一点,就是预测方程。根据上一时刻的状态及控制量来预测当前时刻的状态,当然,这个过程中不可避免的存在误差。
系统的测量方程为 是测量值,大小为 , 也是状态变量到测量的转换矩阵。大小为 。随机变量 是测量噪声。
那什么又是测量方程呢?就是根据此刻的状态量及噪声得到的测量值的过程。另一方面测量方程也表明,测量值是由我们的状态值确定的。
对于状态方程中的系统噪声
和测量噪声
,假设服从如下多元高斯分布,并且
,
是相互独立的。其中
,
为噪声变量的协方差矩阵。

2.2 卡尔曼滤波过程
在此,我们设 为预测值(根据上一时刻的状态及控制量由状态方程得到的当前时刻的状态)、 为估计值(即卡尔曼滤波的最终的结果)、 是测量值的预测(即,根据预测的状态值 得到的测量值)。则三者的关系为
其中, 称之为残差,也就是预测的和你实际测量值之间的差距。如果这项等于0,说明预测和测量出的完全吻合。
这个公式说明什么呢?他的意思就是最终的估计值等于预测值加上乘以系数 的测量残差。
从这个公式可以看出,我们可以根据状态方程得到预测值,根据测量方程可以得到测量值的预测,然后在根据公式3就可以得到最终的估计值。还有一个问题就是系数 的确定。
××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××
接下来说一下参数 的确定。
首先来看一下真实值与估计值之间协方差
将公式3中的估计值带入可得
同理,预测值与真实值之间的写方差矩阵为
系统状态x变量和测量噪声之间是相互独立的。所以,公式5可以写为
将6式带入7式可得
协方差矩阵的对角线元素就是方差。这样一来,把矩阵
的对角线元素求和,用字母T来表示这种算子,他的学名叫矩阵的迹。则有
这样,我们就得到了关于K的一个方程。对其求导可得:

令导数为0,可以求得:
将K值带入公式8中,可得:
×××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××
至此,推到过程结束。我们来理一下卡尔曼滤波的思路:
1.首先,根据公式1计算我们的预测值,根据公式计算预测值与真实值的协方差矩阵
2.根据1中得到的数据计算卡尔曼增益
3.根据预测值和测量值以及卡尔曼增益来计算最终的结果
4.最后还要计算估计值和真实值之间的误差协方差矩阵,为下次递推做准备。
卡尔曼滤波过程就是不断利用以上5个公式进行计算的过程。
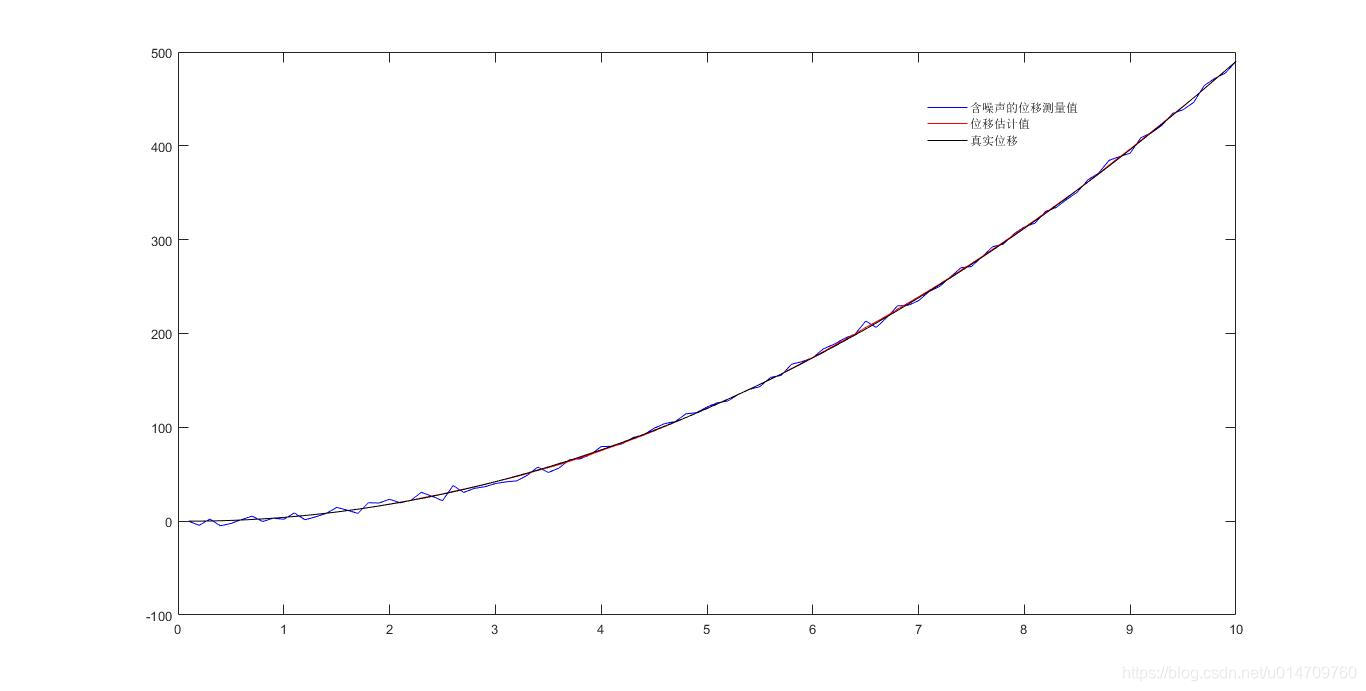
3 卡尔曼滤波应用
此部分内容来自:https://blog.csdn.net/m0_38089090/article/details/79523784
应用背景是匀加速小车,该线性系统的状态差分方程为
对小车进行建模,ft为合力,小车的状态方程表示为

矩阵形式表示为

#include <iostream>
#include <fstream>
#include <string>
#include <vector>
#include <eigen3/Eigen/Dense>//包含Eigen矩阵运算库,用于矩阵计算
#include <cmath>
#include <limits>//用于生成随机分布数列
using namespace std;
using Eigen::MatrixXd;
double generateGaussianNoise(double mu, double sigma);//随机高斯分布数列生成器函数
int main(int argc, char* argv[])
{
//""中是txt文件路径,注意:路径要用//隔开
ofstream fout("..//result.txt");
const double delta_t = 0.1;//控制周期,100ms
const int num = 100;//迭代次数
const double acc = 10;//加速度,ft/m
MatrixXd A(2,2);
A(0,0) = 1;
A(1,0) = 0;
A(0,1) = delta_t;
A(1,1) = 1;
MatrixXd B(2,1);
B(0,0) = pow(delta_t,2)/2;
B(1,0) = delta_t;
MatrixXd H(1,2);//测量的是小车的位移,速度为0
H(0,0) = 1;
H(0,1) = 0;
MatrixXd Q(2,2);//过程激励噪声协方差,假设系统的噪声向量只存在速度分量上,且速度噪声的方差是一个常量0.01,位移分量上的系统噪声为0
Q(0,0) = 0;
Q(1,0) = 0;
Q(0,1) = 0;
Q(1,1) = 0.01;
MatrixXd R(1,1);//观测噪声协方差,测量值只有位移,它的协方差矩阵大小是1*1,就是测量噪声的方差本身。
R(0,0) = 10;
//time初始化,产生时间序列
vector<double> time(100, 0);
for(decltype(time.size()) i = 0; i != num; ++i){
time[i] = i * delta_t;
//cout<<time[i]<<endl;
}
MatrixXd X_real(2,1);
vector<MatrixXd> x_real, rand;
//生成高斯分布的随机数
for(int i = 0; i<100;++i){
MatrixXd a(1,1);
a(0,0) = generateGaussianNoise(0,sqrt(10));
rand.push_back(a);
}
//生成真实的位移值
for(int i = 0; i < num; ++i){
X_real(0,0) = 0.5 * acc * pow(time[i],2);
X_real(1,0) = 0;
x_real.push_back(X_real);
}
//变量定义,包括状态预测值,状态估计值,测量值,预测状态与真实状态的协方差矩阵,估计状态和真实状态的协方差矩阵,初始值均为零
MatrixXd X_evlt = MatrixXd::Constant(2,1,0), X_pdct = MatrixXd::Constant(2,1,0), Z_meas = MatrixXd::Constant(1,1,0),
Pk = MatrixXd::Constant(2,2,0), Pk_p = MatrixXd::Constant(2,2,0), K = MatrixXd::Constant(2,1,0);
vector<MatrixXd> x_evlt, x_pdct, z_meas, pk, pk_p, k;
x_evlt.push_back(X_evlt);
x_pdct.push_back(X_pdct);
z_meas.push_back(Z_meas);
pk.push_back(Pk);
pk_p.push_back(Pk_p);
k.push_back(K);
//开始迭代
for(int i = 1; i < num; ++i){
//预测值
X_pdct = A * x_evlt[i-1] + B * acc;
x_pdct.push_back(X_pdct);
//预测状态与真实状态的协方差矩阵,Pk'
Pk_p = A * pk[i-1] * A.transpose() + Q;
pk_p.push_back(Pk_p);
//K:2x1
MatrixXd tmp(1,1);
tmp = H * pk_p[i] * H.transpose() + R;
K = pk_p[i] * H.transpose() * tmp.inverse();
k.push_back(K);
//测量值z
Z_meas = H * x_real[i] + rand[i];
z_meas.push_back(Z_meas);
//估计值
X_evlt = x_pdct[i] + k[i] * (z_meas[i] - H * x_pdct[i]);
x_evlt.push_back(X_evlt);
//估计状态和真实状态的协方差矩阵,Pk
Pk = (MatrixXd::Identity(2,2) - k[i] * H) * pk_p[i];
pk.push_back(Pk);
}
cout<<"含噪声测量"<<" "<<"后验估计"<<" "<<"真值"<<" "<<endl;
for(int i = 0; i < num; ++i){
cout<<z_meas[i]<<" "<<x_evlt[i](0,0)<<" "<<x_real[i](0,0)<<endl;
fout<<z_meas[i]<<" "<<x_evlt[i](0,0)<<" "<<x_real[i](0,0)<<endl;//输出到txt文档,用于matlab绘图
//cout<<k[i](1,0)<<endl;
//fout<<rand[i](0,0)<<endl;
//fout<<x_pdct[i](0,0)<<endl;
}
fout.close();
return 0;
}
//生成高斯分布随机数的函数,网上找的
double generateGaussianNoise(double mu, double sigma)
{
const double epsilon = std::numeric_limits<double>::min();
const double two_pi = 2.0*3.14159265358979323846;
static double z0, z1;
static bool generate;
generate = !generate;
if (!generate)
return z1 * sigma + mu;
double u1, u2;
do
{
u1 = rand() * (1.0 / RAND_MAX);
u2 = rand() * (1.0 / RAND_MAX);
}
while ( u1 <= epsilon );
z0 = sqrt(-2.0 * log(u1)) * cos(two_pi * u2);
z1 = sqrt(-2.0 * log(u1)) * sin(two_pi * u2);
return z0 * sigma + mu;
}
测试结果为: