首先科普一下反向动力学是啥?
反向动力学:
Inverse kinematics
一种通过先确定子骨骼的位置,然后反求推导出其所在骨骼链上n级父骨骼位置,从而确定整条骨骼链的方法。
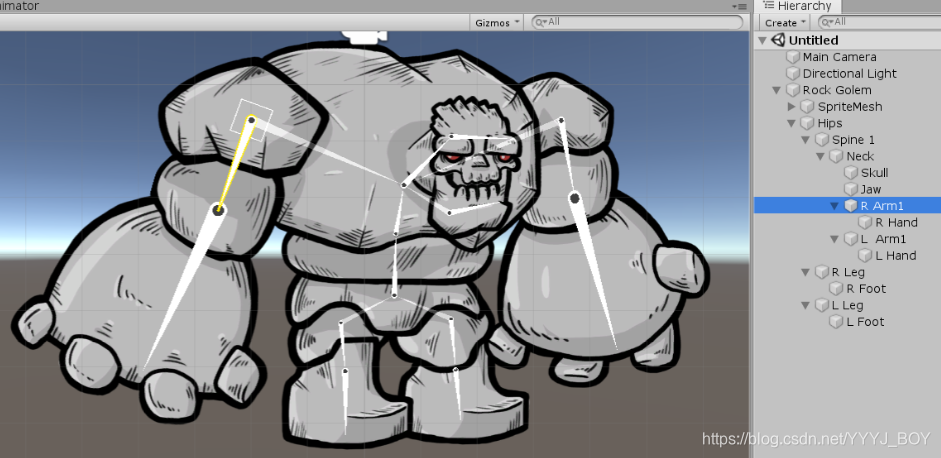
按照前几章的步骤,将角色的其他部分补齐并绑定好骨骼,如下图
设置好角色后
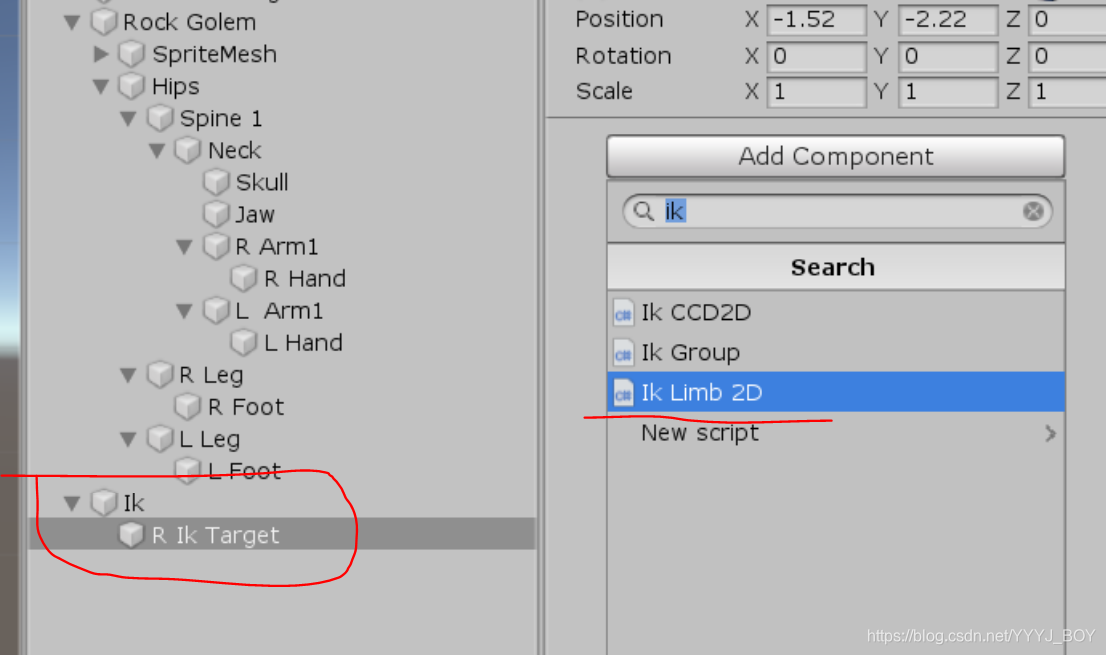
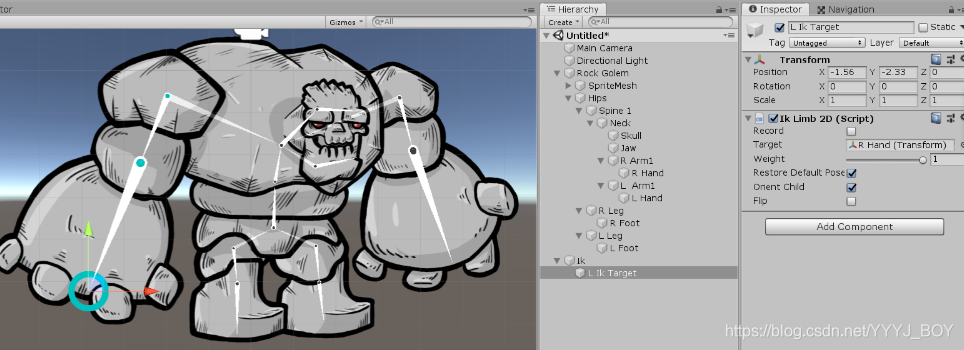
创建一个空对象并命名为IK,然后在IK下再创建一个空的子对象并命名为R IK Target
然后在R IK Target 对象里添加Ik Limb 2D组件
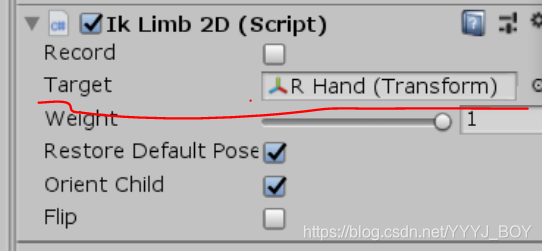
找到右手的骨骼并将其拖拽至Target
这时会发现角色右手臂位置发生变化,这是因为Ik的位置导致的,调整一下Ik的位置即可恢复正常
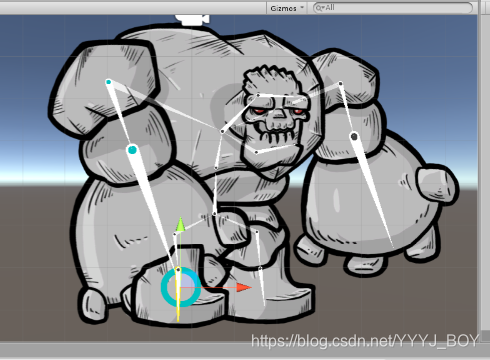
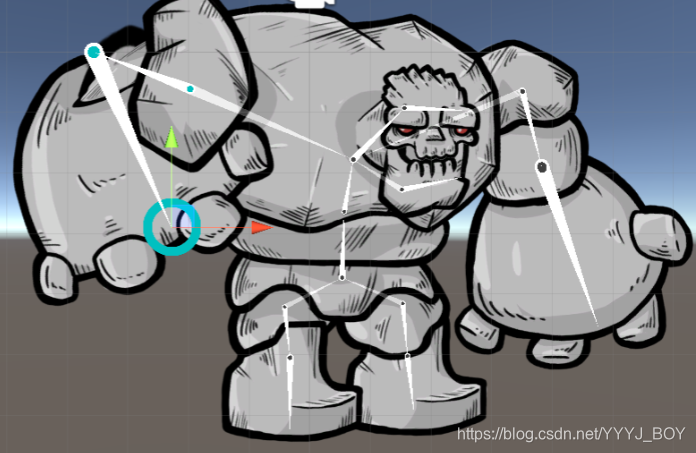 调整后恢复正常
调整后恢复正常
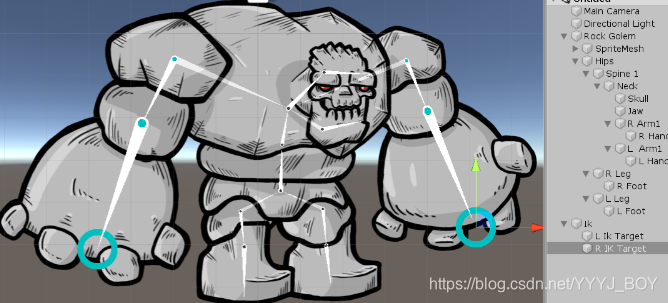
移动IK,手臂也会随之移动,如果有下图穿帮效果,是因为层级问题,调整一下层级顺序即可恢复正常
然后按照相同的方法,也给左手设置IK
IK设置好后,即可制作IK骨骼动画