原理:
基于二维的Otsu(灰度级-平均灰度级)图像分割方式的思想与一维 Otsu 图像分割的思想一样。
二维的Otsu提高了一维的抗噪能力。
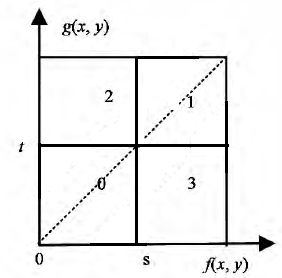
用f(i,j)和g(i,j)取代像素点(i,j)处的灰度值f(i,j);其中g(i,j)为像素点(i,j)处邻域像素值的均值。
取代后变成二维形式:[ f(i,j),g(i,j) ]。
设:灰度值为 i ,灰度均值为 j 的像素点个数为 ni,其概率 Pij 为:
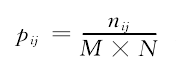
其中M*N是图像的总像素数。
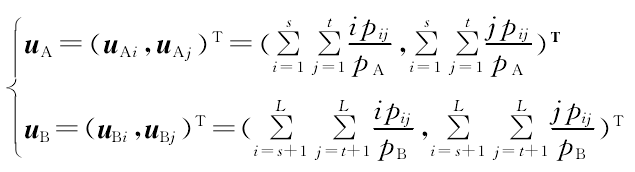
以阈值(s,t)将图像像素分为 A B 两类,其中 令 A 类为背景类,B 类为目标类,二者概率分别为:

背景类和目标类的均值向量分别为:
整幅图像的均值向量为:

由离散测度矩阵:

得该图像的离散测度:

所得离散度越大,类间方差就越大。
如果 g(x,y),与f(x,y)相差很大,说明该像素点(x,y)是噪声,故可将 0 区与 1 区当作背景与目标域,2 区与 3 区当作噪声。因此只需要在 0和1 区域求最佳阈值向量(s,t)。求出之后令灰度图最佳阈值 T=(s+t)/2,最后以T 为阈值进行图像分割。