参考资料:
https://blog.csdn.net/csshuke/article/details/80252406
http://forum.eepw.com.cn/thread/268670/1#
https://www.cnblogs.com/lsjjob/p/4482963.html
看了上面两张图和参考的博客,我一开始有几个疑惑:
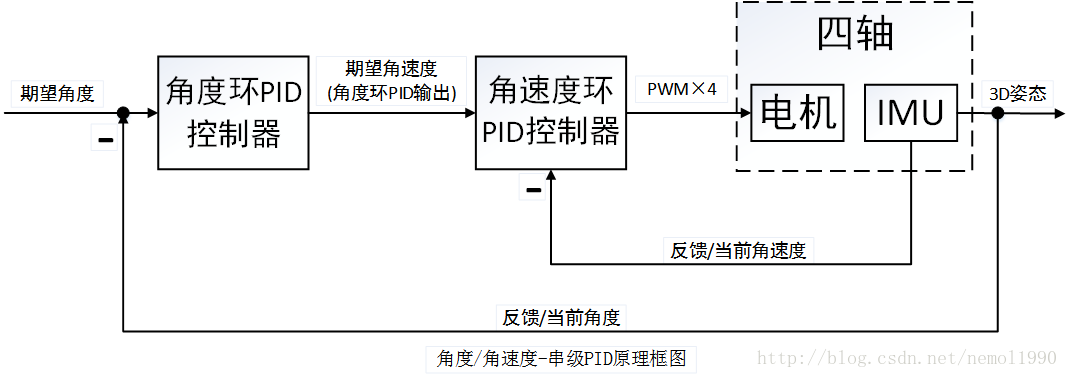
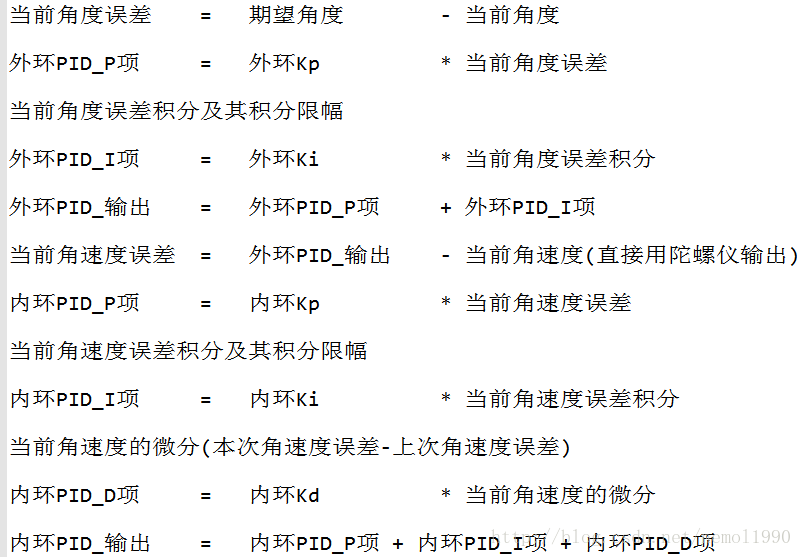
1:为什么外环pid输出(上图可能漏写了外环d)能直接作为期望角速度输入到内环角速度控制里?
由于我也没学过控制相关的课程,只能找个勉强能让自己接受的解释:外环pid的输出,即原本单环时候的角度控制的输出,也就是说它直接对应输出力的大小,在稳定的情况下,力的大小直接对应着一定的角速度,所以才能直接输出给内环。
2:为什么yaw角没有外环控制,只有内环角速度控制?
这个我也想了好一会儿,个人理解是这样的(我没其他参考资料,所以没法验证这个解释的正确性):外环保持pitch和roll角平衡而输出一定量时,就已经确定了四个电机的转速(此时不要考虑内环),四个浆的转速一旦确定,四轴的扭矩就已经确定,yaw角速度也就已经确定,也就是说,内环只要给出pitch和roll的pid输出,就伴随的产生了yaw的输出,所以外环无法同时计算三个角的pid,至于内环要输入的期望yaw角速度,保持四轴方向时应该就填0,要往左右转就填一个合适的角速度值,待转到合适的方向就把期望yaw角速度置0即可(这个做法理论上应该是可以的,但是我也不确定)
扫描二维码关注公众号,回复:
5968134 查看本文章
