首页
移动开发
物联网
服务端
编程语言
企业开发
数据库
业界资讯
其他
搜索
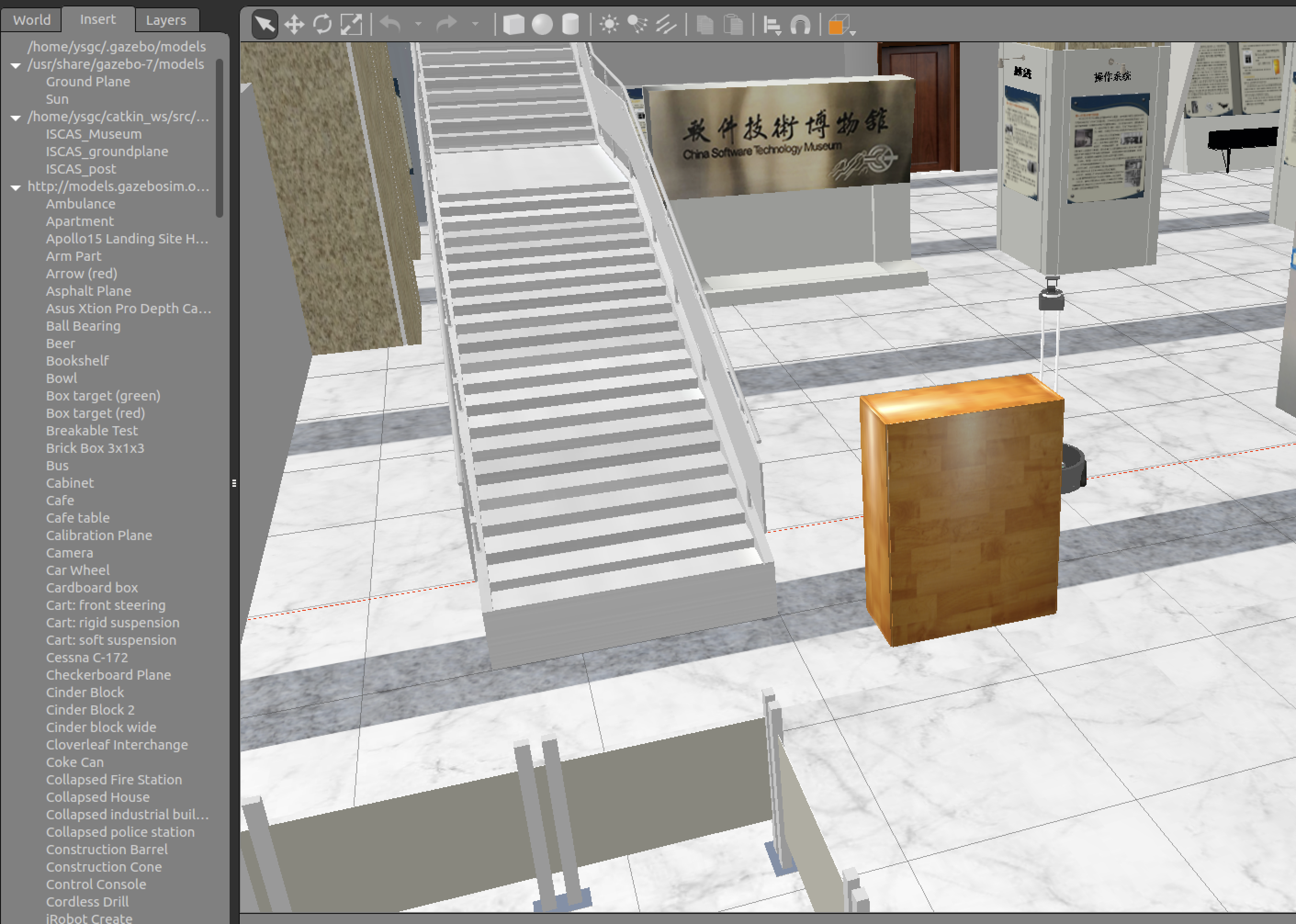
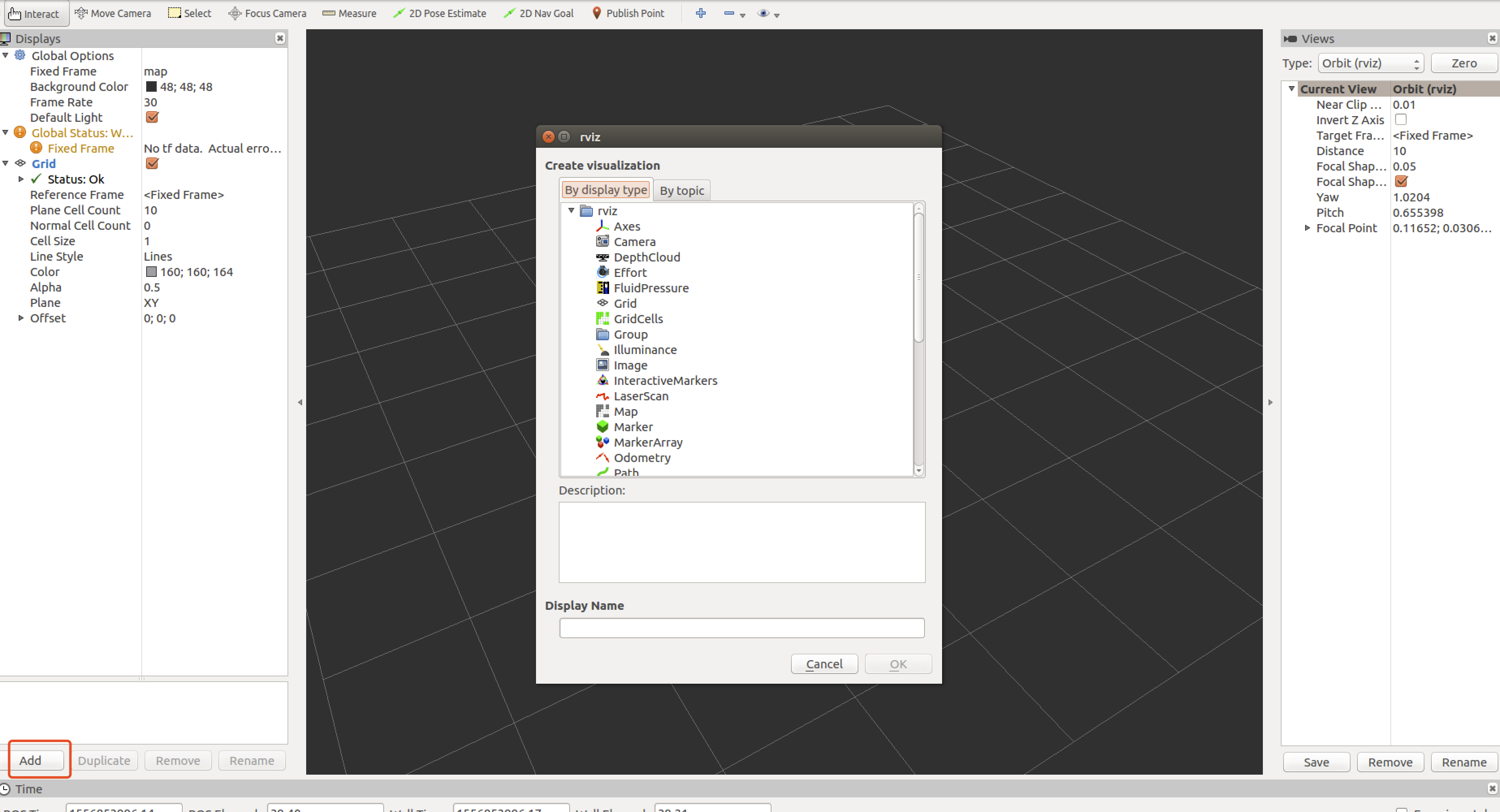
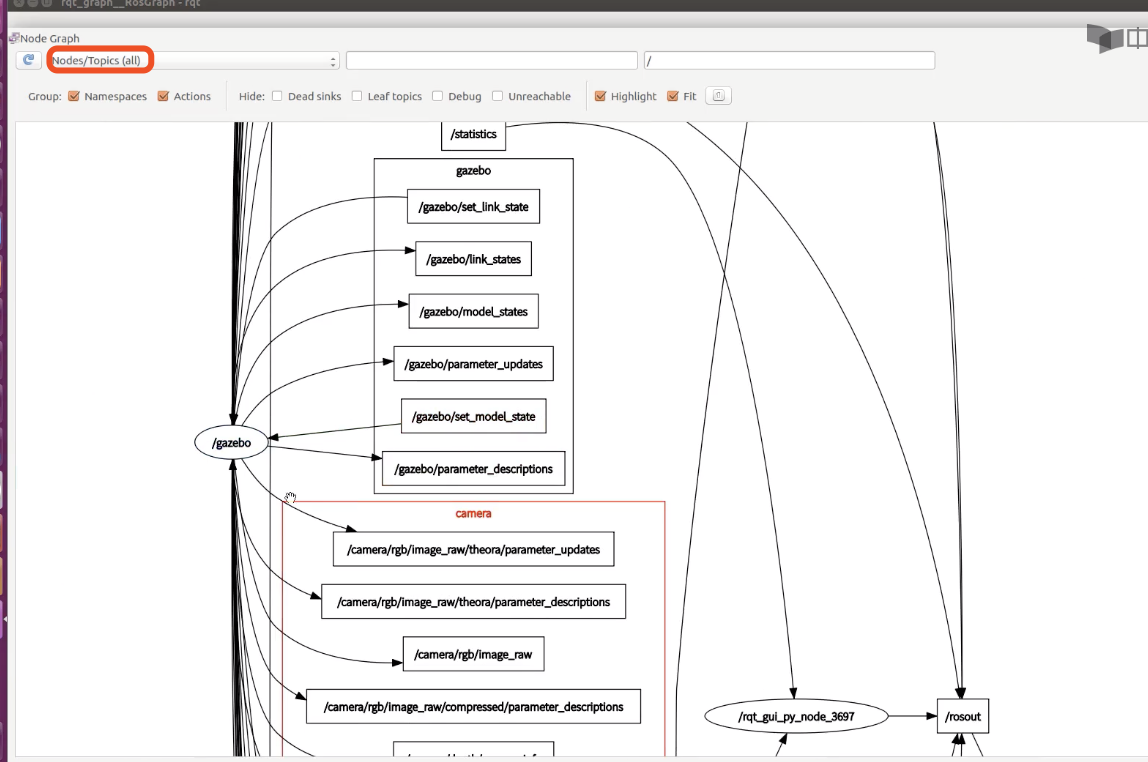
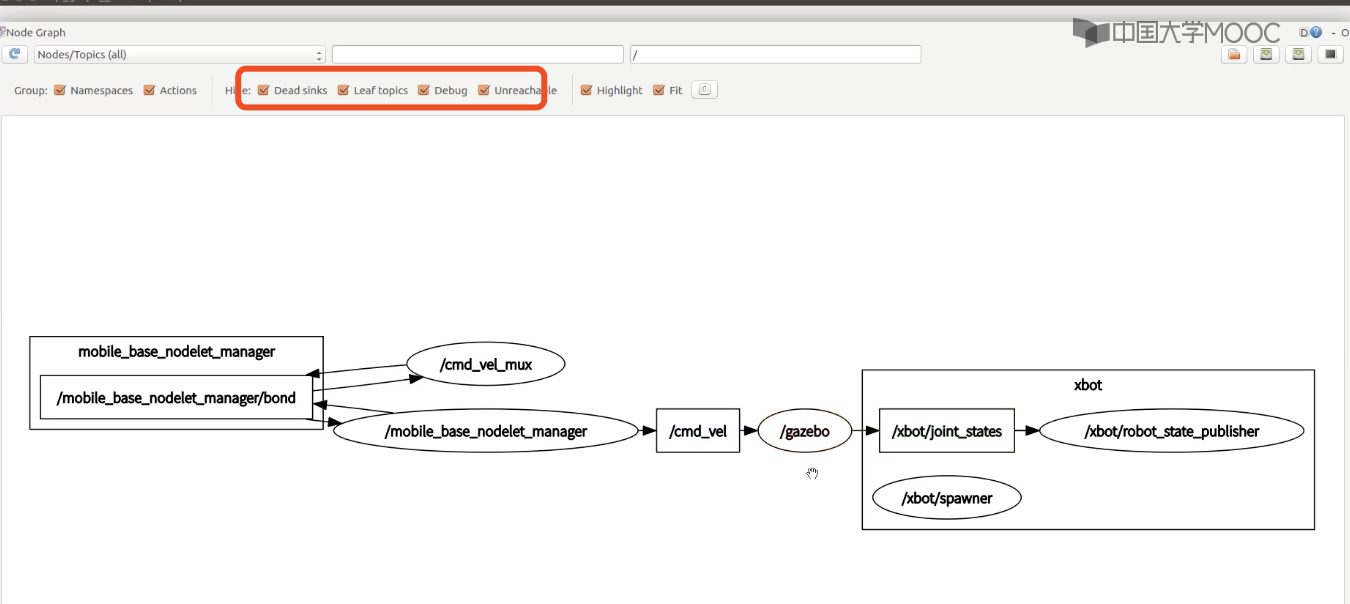
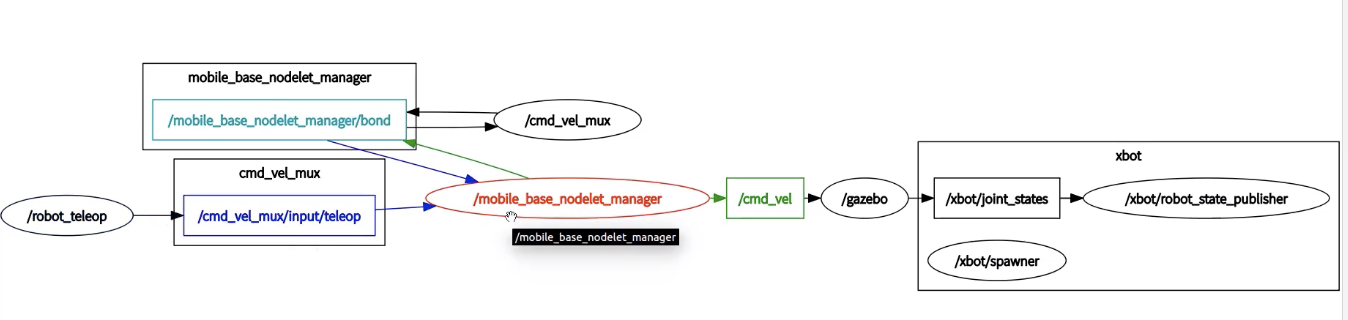
[ROS] Chinese MOOC || Chapter-5.1 Gazebo 5.2 RViz 5.3 rqt
其他
2019-05-03 12:28:04
阅读次数: 0
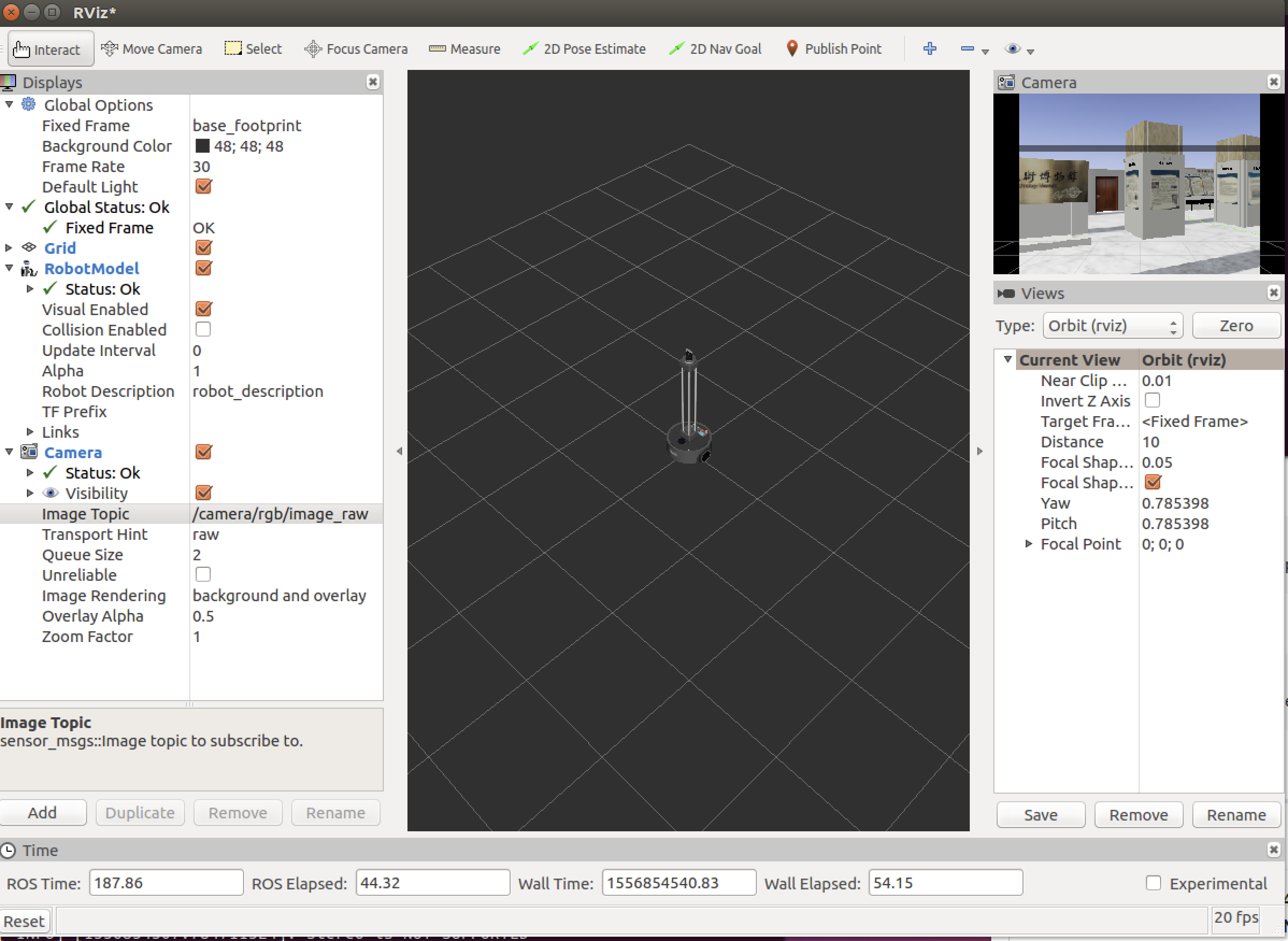
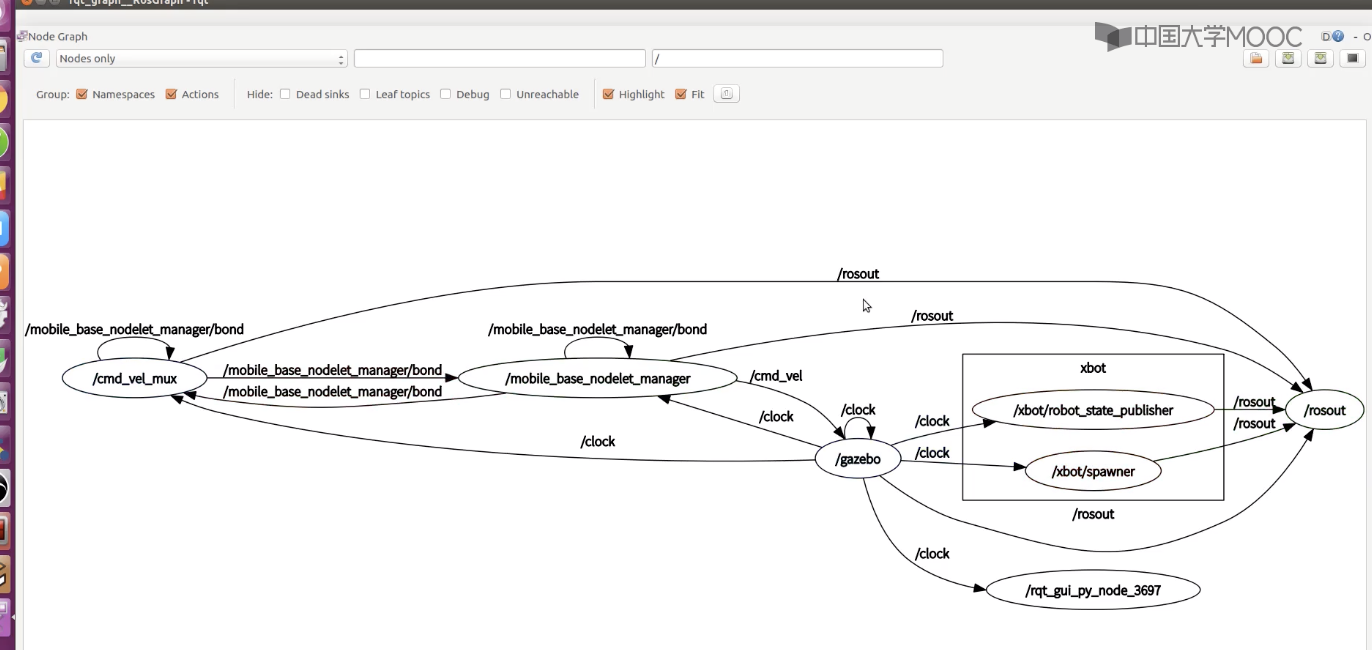
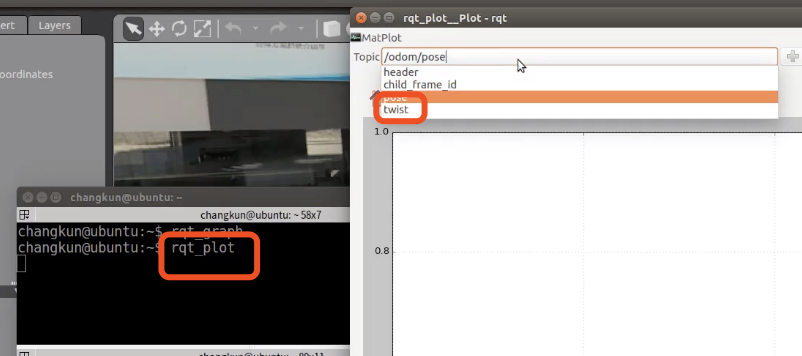
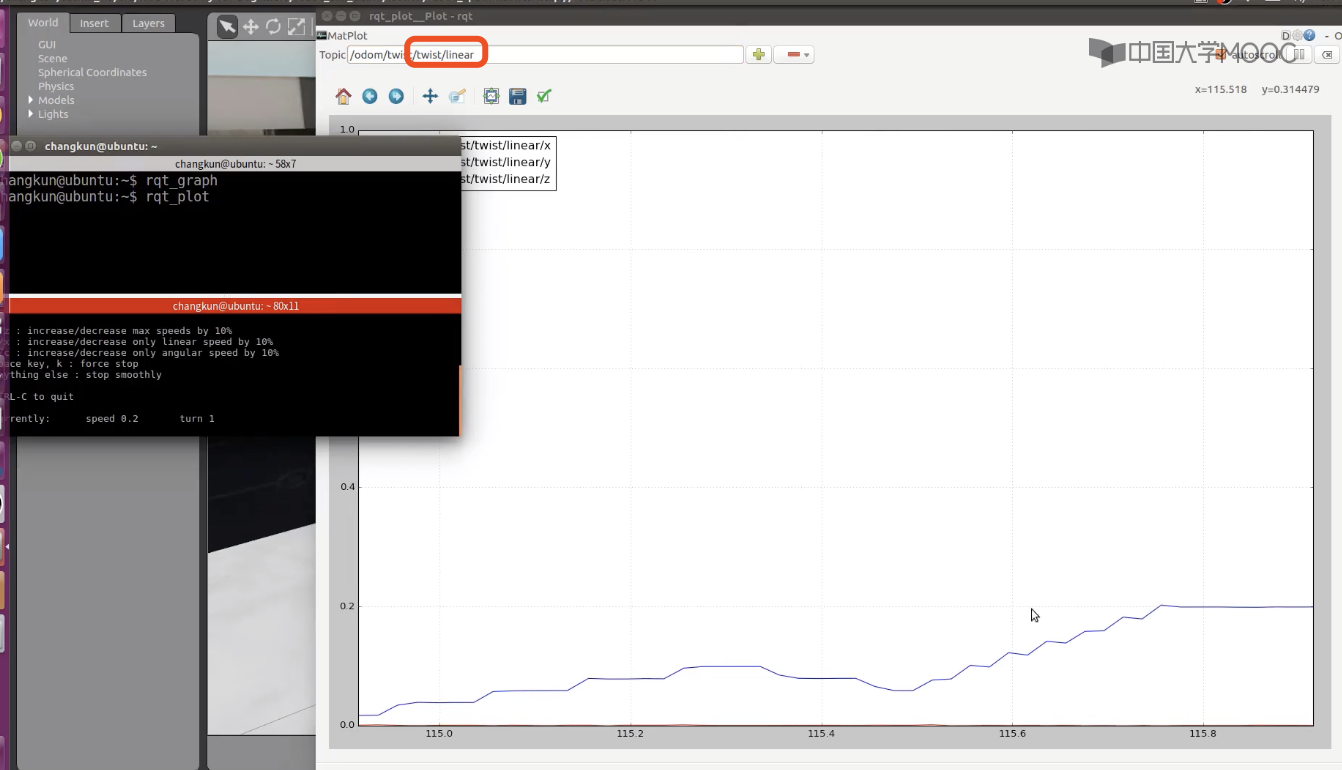
左边每个插件都是一个subscriber
启动键盘控制运动
pose位置
twist速度
猜你喜欢
转载自
www.cnblogs.com/ecoflex/p/10804719.html
[ROS] Chinese MOOC || Chapter-5.1 Gazebo 5.2 RViz 5.3 rqt
[ROS] Chinese MOOC || Chapter-2.4 Metapackage
[ROS] Chinese MOOC || Chapter-4.4 Action
[ROS] Chinese MOOC || Chapter-5.4 Bag
ROS环境Gazebo与Rviz仿真
[ROS] Chinese MOOC || Chapter-3.1 Master and Node
[ROS] Chinese MOOC || Chapter-9.4 SLAM操作演示
[ROS] Chinese MOOC || Chapter-4.3 操作演示
[ROS] Chinese MOOC || Chapter-2.2 Package组成
[ROS] Chinese MOOC || Chapter-3.3 Topic and Msg
[ROS] Chinese MOOC || Chapter-10.5 操作演示navigation
[ROS] Chinese MOOC || Chapter-3.2 操作演示
[ROS] Chinese MOOC || Chapter-6.4 service_demo
ROS Rviz以及gazebo libGL error
【ROS】RViz、Gazebo和Navigation的关系
[ROS] Chinese MOOC || Chapter-2.1 Catkin工作空间与编译系统
[ROS] Chinese MOOC || Chapter-2.3 操作演示:Catkin工作空间探索
[ROS] Chinese MOOC || Chapter-9.2 Gmapping SLAM package 9.3 Karto SLAM
[ROS] Chinese MOOC || Chapter-7.3 topic_demo 7.4 service_demo
[ROS] Chinese MOOC || Chapter-4.2 Parameter Server参数服务器
[ROS] Chinese MOOC || Chapter-10.3 Costmap 10.4 map_service and AMCL
[ROS] Chinese MOOC || Chapter-4.1 通信架构 - Service和srv
ROS——rqt
[ROS] Chinese MOOC || Chapter-8.1 tf介绍:tf tree 8.2 tf消息 8.3 tf in c++ 8.4 tf in python
Ros RViz
Ubuntu下ROS使用Gazebo和Rviz对UR5机器人建模
ROS学习【15】-----利用Gazebo+Rviz搭建基于MoveIt系统架构的机械臂控制仿真
ROS学习之利用xacro/URDF模型搭建及rviz和gazebo仿真
如何可视化docker:以ROS环境为例(例如Gazebo,Rviz)
RK3588安装ROS 解决Rviz以及Gazebo报错问题
今日推荐
周排行
(BIND最佳实践)Linux运维最佳实践
makefile ifeq之坑: 1. syntax error near unexpected token 2. *** missing separator. Stop.
easyui datagrid操作栏内置图片按钮
SQLyog连接MySQL时出现的2058错误解决方法
linux音频开发
hashcode方法 简析
SpringBoot中使用Transaction注解遇到的坑
逆战-CSS中子元素在父元素中的4种水平垂直居中方法
Expression.Blend.4 Chapter 图片和视频的使用
springMVC返回void值
每日归档
更多
2024-09-17(0)
2024-09-16(0)
2024-09-15(0)
2024-09-14(0)
2024-09-13(0)
2024-09-12(0)
2024-09-11(0)
2024-09-10(0)
2024-09-09(0)
2024-09-08(0)