DFT 矩阵 与steering vector的对应关系
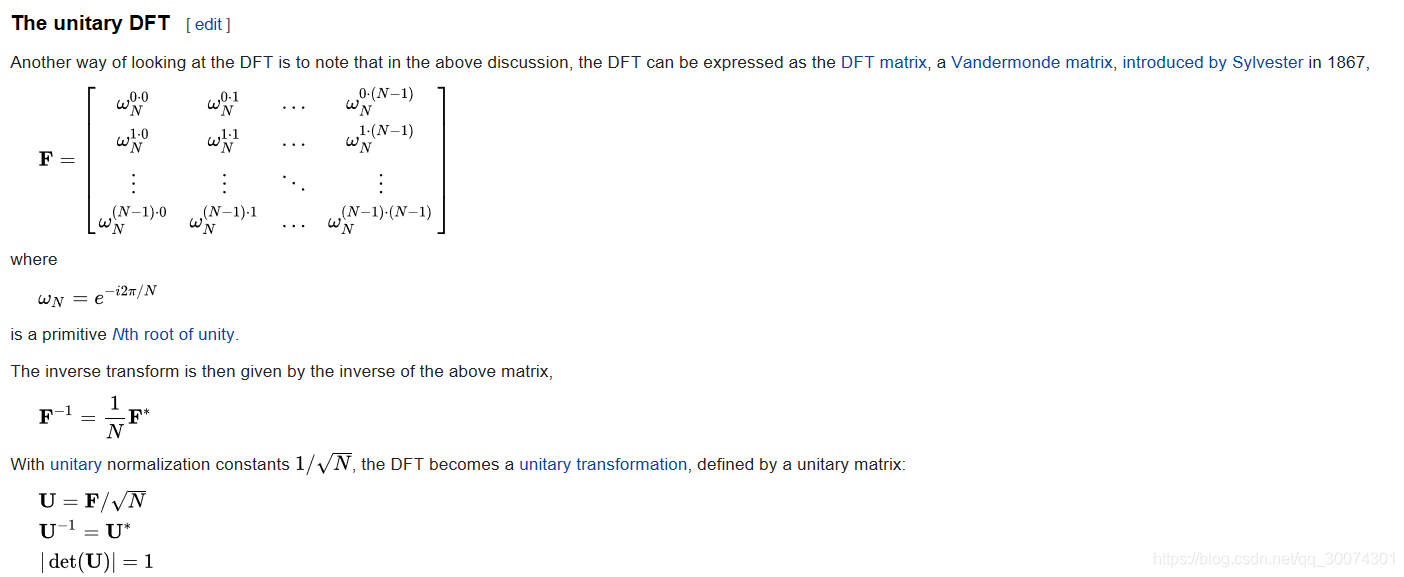
steering vector:
-
sinθ
a(θ)=[1,eλj2πdsinθ,⋯,eλj2π(N−1)dsinθ]T
–>
d=λ/2—>
e−Nj2π(i−1)+j2kπ=eλj2πdsinθ=ejπsinθ---->
−N2(i−1)+2k=sinθ,i=1,2,...,N,k=0,±1,±2...,
当
i=N/2+1时,
sinθ=−1
所以
i从1到
i=N/2+1时,角度变化从0到
−π/2到
0,
从
i=N/2+2到N时,
k=1,角度从
−π/2 到
0, 所以中间有
π的跳变
2.
cosθ
a(θ)=[1,eλj2πdcosθ,⋯,eλj2π(N−1)dcosθ]T
–>
d=λ/2—>
e−Nj2π(i−1)+j2kπ=eλj2πdcosθ=ejπcosθ---->
−N2(i−1)+2k=cosθ,i=1,2,...,N,k=0,±1,±2...,
当
i=N/2+1时,
cosθ=−1
所以
i从1到
i=N/2+1时,角度变化从
π到
π/2
从
i=N/2+2到N时,
k=1,值从1到0,角度从
0 到
π/2, 所以中间有
π/2的跳变

Conclusion
DFT 矩阵每一列对应steering vector的某一方向,因此使用DFT矩阵来刻画mmwave信道角度域的稀疏性的时候,相当于给AoA和AoD域划分了格点,并且这个 划分的 AoA\AoD 按弧度(
sinθ的
θ并不是均匀的,是按值域均匀划分的。
~~(Note: 许多东西不要想当然,要自己去推,主要是要练手)