版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/YunLaowang/article/details/86644361
基于Win10+OpenCV3.4.1+PCL1.8环境,使用双目立体视差图进行三维点云的重建。
原理
使用双目视差图重建三维点云的原理其实很简单,与使用RGB-D相机进行三维点云重建的过程并没有太大区别,主要是通过双目立体视觉获取物体的深度信息( ),并计算 坐标值,配合原图提供的RGB信息,即可构成三维点云(PointXYZRGB)。
- 双目立体视觉获取视差图和深度图的原理可参考: 双目视觉测距原理深度剖析:一个被忽略的小问题
- 三维点云重建相关流程可参考:三维重建技术概述
代码
/*
相机参数:
cam0 = [4152.073 0 1288.147; 0 4152.073 973.571; 0 0 1]
cam1 = [4152.073 0 1501.231; 0 4152.073 973.571; 0 0 1]
doffs = 213.084
baseline = 176.252
width = 2872
height = 1984
相机内参数矩阵:
K=[fx 0 u0; 0 fy v0; 0 0 1]
*/
#include <pcl/visualization/cloud_viewer.h>
#include <iostream>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
using namespace pcl;
int user_data;
// 相机内参
const double u0 = 1288.147;
const double v0 = 973.571;
const double fx = 4152.073;
const double fy = 4152.073;
const double baseline = 176.252;
const double doffs = 213.084;// 两个相机主点在x方向上的差距, doffs = cx1 - cx0
void viewerOneOff(visualization::PCLVisualizer& viewer)
{
viewer.setBackgroundColor(0.0, 0.0, 0.0);
}
int main()
{
// 读入数据
Mat color = imread("im0.png"); // RGB
Mat depth = imread("disp0.png",IMREAD_UNCHANGED);// depth
if (color.empty() || depth.empty())
{
cout << "The image is empty, please check it!" << endl;
return -1;
}
// 相机坐标系下的点云
PointCloud<PointXYZRGB>::Ptr cloud(new PointCloud<PointXYZRGB>);
for (int row = 0; row < depth.rows; row++)
{
for (int col = 0; col < depth.cols; col++)
{
ushort d = depth.ptr<ushort>(row)[col];
if (d==0)
continue;
PointXYZRGB p;
// depth
p.z = fx * baseline / (d + doffs); // Zc = baseline * f / (d + doffs)
p.x = (col - u0) * p.z / fx; // Xc向右,Yc向下为正
p.y = (row - v0) * p.z / fy;
p.y = -p.y; // 为便于显示,绕x轴三维旋转180°
p.z = -p.z;
// RGB
p.b = color.ptr<uchar>(row)[col * 3];
p.g = color.ptr<uchar>(row)[col * 3 + 1];
p.r = color.ptr<uchar>(row)[col * 3 + 2];
cloud->points.push_back(p);
}
}
cloud->height = depth.rows;
cloud->width = depth.cols;
cloud->points.resize(cloud->height * cloud->width);
visualization::CloudViewer viewer("Cloud Viewer");
viewer.showCloud(cloud);
viewer.runOnVisualizationThreadOnce(viewerOneOff);
while (!viewer.wasStopped())
{
user_data = 9;
}
return 0;
}
有一点需要注意的是,在计算
时,如果按照如下公式计算:
则所得坐标以: 轴向右、 轴向下为正方向,如下图。
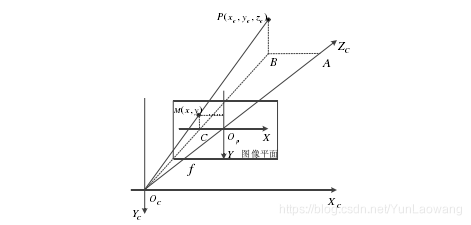
图像坐标系与相机坐标系的关系
因此,为了正常显示,需要将结果绕 轴旋转180°(三维旋转)。而绕 轴进行三维旋转的变换矩阵如下所示:
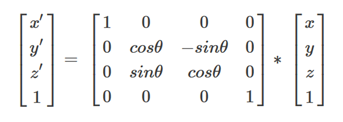
取
,可知绕
轴旋转180°,即相当于:
结果如图:

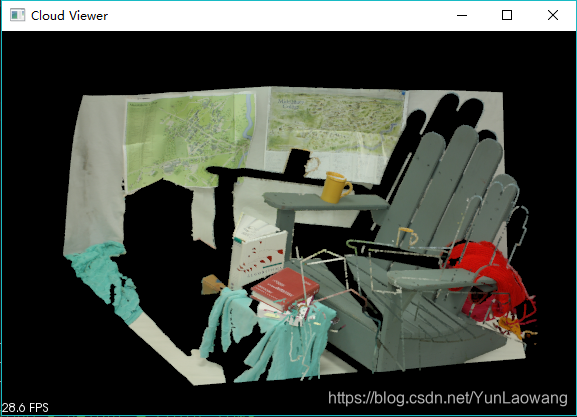
素材及处理
博主使用的RGB和depth图取自:vision middlebury_Adirondack,大家可自行下载。
- 问题
因为middlebury提供的groundtruth是.pfm格式的文件,而OpenCV是不支持.pfm格式文件操作的,因此就需要自己造“轮子”或者转成OpenCV支持的格式。 - 解决方法
这里使用的是图片格式在线转换工具,将.pfm格式图片转成.png格式:多种格式在线互转网站,亲测好用。
当然,github上大神也提供了开源的“轮子”,可直接读入.pfm文件并转成Mat格式:点击此处链接,操作十分简单,如下是作者给出的例子。
/**
* Example of how to read and save PFM files.
*/
#include <iostream>
#include <string>
#include "PFMReadWrite.h"
using namespace std;
using namespace cv;
int main(void)
{
//Example that loads an image and stores it under another name
Mat image = loadPFM(string("image.pfm"));
//Display the image
imshow("Image", image);
waitKey(0);
savePFM(image, "image_saved.pfm");
return 0;
}
备注:
- 上述代码同样支持其他图片,只要修改对应的相机内参即可。
- 所有相关文件下载【CSDN】:双目立体视差图进行三维点云重建【OpenCV3.4.1+PCL1.8】
- 参考:用VS+Opencv3.1从双目立体视差图中重建三维点云