1. 安装Ubuntu14.04, pass。
2. 安装Ros-indigo
2.1 添加源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu trusty main" > /etc/apt/sources.list.d/ros-latest.list'wget http://packages.ros.org/ros.key -O - | sudo apt-key add -2.2 更新源
sudo apt-get update 2.3 安装ros
sudo apt-get install ros-indigo-desktop-full等安装完成运行:
sudo rosdep init
rosdep update 2.4 设置环境变量
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
source ~/.bashrc 3. 安装apollo-kernel
3.1 apollo-kernel的改进:
- Realtime patch (实时补丁)
- Latest e1000e intel ethernet driver(针对最新e1000e英特尔以太网驱动程序)
- Bugfix for Nvidia driver under realtime patch(修复实时补丁下Nvidia显卡的bug)
- Double free in the inet_csk_clone_lock function patch
- Other cve security patches(其他cve安全补丁)
3.2 在Apollo github下载百度编译好的内核,选择release
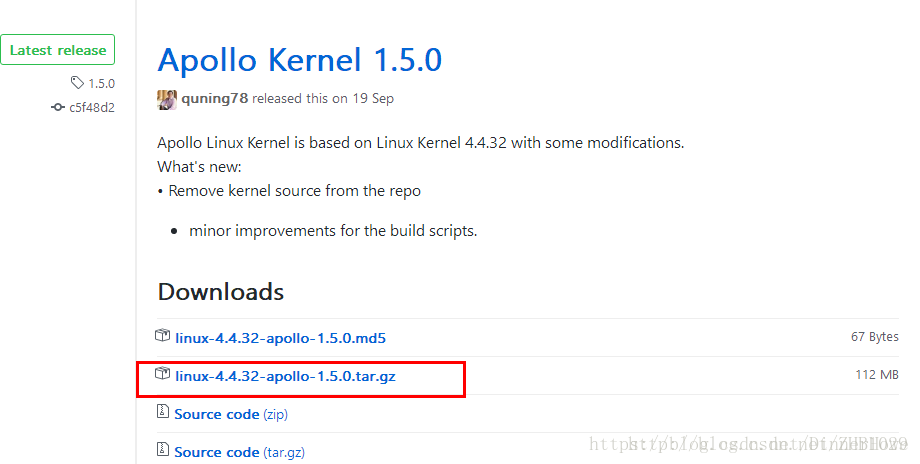
3.3 解压并安装
tar zxvf linux-4.4.32-apollo-1.5.0.tar.gz
cd install
sudo ./install_kernel.sh完成后重启进入新内核
4. 安装apollo-platform
4.1 改进:
- 增强了ROS的去中心化特性。
- 基于共享内存的更高效的通信。
- 支持Protobuf。
4.2 下载apollo-platform并解压:
https://github.com/ApolloAuto/apollo-platform/releases/download/1.5.1/ros-indigo-apollo-1.5.1-x86_64.tar.gz4.3 将文件夹中的ros拷贝到apollo工程中:
rsync -av ros/ ~/apollo/third_party/ros_x86_64
cd apollo目录下执行:
source ./third_party/ros_x86_64/setup.bash至此,apollo部署完毕,接下来进行测试。
5. 安装Apollo
5.1 下载源码:
git clone https://github.com/ApolloAuto/apollo.git5.2 安装docker环境:
cd ~/apollo
bash docker/scripts/install_docker.sh5.3 检测docker是否安装
先注销再重新登录,然后测试一下docker是否安装成功:
docker ps5.4 设置环境:
bash docker/scripts/dev_start.sh
bash docker/scripts/dev_into.sh5.5 编译:
bash apollo.sh build6. apollo测试
6.1 加载环境
(如果没有进入docker环境,先进入docker)
cd ~/apollo
bash docker/scripts/dev_start.sh
bash docker/scripts/dev_into.sh
source ./third_party/ros_x86_64/setup.bash //执行后可以在docker下使用ros
sh scripts/hmi.sh //进入交互环境6.2 进入hmi界面
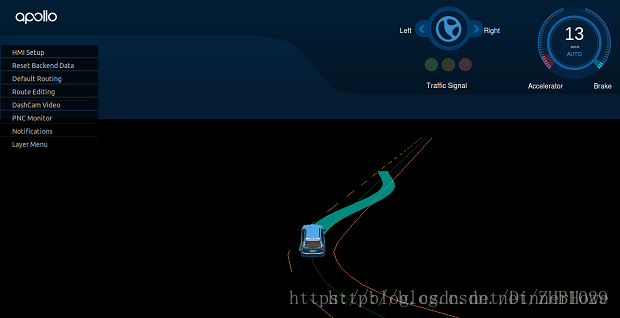
在浏览器输入http://localhost:8887后回车,出现以下界面开启Dreamview,然后点击右上方的Dreamview。

6.3 跑bag包
新开一个终端里输入:
rosbag play -l ./docs/demo_guide/demo.bag然后就可以看到界面播放demo.bag数据啦: